 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuro-Symbolic Learning for Long-Horizon Task Planning Under Complex Logical Constraints
Jun 05, 2026Task planning often suffers from severe efficiency bottlenecks when robots must reason over long-horizon action sequences under complex logical constraints, including object affordances, spatial relationships, and sequential action dependencies. Recent neuro-symbolic methods improve planning efficiency by learning object-importance scores to prune task-irrelevant objects, but they typically rely on fixed offline supervision generated from full search spaces. This creates a train-test mismatch: at deployment, the planner operates in pruned search spaces induced by the model's own imperfect predictions, leading to exposure bias and degraded planning performance. To address this challenge, we formulate object-importance learning for task planning as an imperative learning-based bilevel optimization problem. The upper level optimizes a neural scorer, while the lower level solves a symbolic planning problem in the score-pruned search space. To stabilize this learning process, we introduce a 3R strategy into the lower-level planning, using parallel Repair, Restart, and Rollback recovery to provide reliable and adaptive feedback for upper-level learning. Experiments on three challenging benchmarks demonstrate state-of-the-art performance, including an 80.04% reduction in failure rate and a 57.14% reduction in planning time. We further validate the framework on a quadruped-based mobile manipulator in simulation and the real world, demonstrating its potential for efficient and deployable neuro-symbolic task planning.
Learning When to Jump for Off-road Navigation
Jan 31, 2026Low speed does not always guarantee safety in off-road driving. For instance, crossing a ditch may be risky at a low speed due to the risk of getting stuck, yet safe at a higher speed with a controlled, accelerated jump. Achieving such behavior requires path planning that explicitly models complex motion dynamics, whereas existing methods often neglect this aspect and plan solely based on positions or a fixed velocity. To address this gap, we introduce Motion-aware Traversability (MAT) representation to explicitly model terrain cost conditioned on actual robot motion. Instead of assigning a single scalar score for traversability, MAT models each terrain region as a Gaussian function of velocity. During online planning, we decompose the terrain cost computation into two stages: (1) predict terrain-dependent Gaussian parameters from perception in a single forward pass, (2) efficiently update terrain costs for new velocities inferred from current dynamics by evaluating these functions without repeated inference. We develop a system that integrates MAT to enable agile off-road navigation and evaluate it in both simulated and real-world environments with various obstacles. Results show that MAT achieves real-time efficiency and enhances the performance of off-road navigation, reducing path detours by 75% while maintaining safety across challenging terrains.
VL-Nav: Real-time Vision-Language Navigation with Spatial Reasoning
Feb 02, 2025



Vision-language navigation in unknown environments is crucial for mobile robots. In scenarios such as household assistance and rescue, mobile robots need to understand a human command, such as "find a person wearing black". We present a novel vision-language navigation (VL-Nav) system that integrates efficient spatial reasoning on low-power robots. Unlike prior methods that rely on a single image-level feature similarity to guide a robot, we introduce the heuristic-vision-language (HVL) spatial reasoning for goal point selection. It combines pixel-wise vision-language features and heuristic exploration to enable efficient navigation to human-instructed instances in various environments robustly. We deploy VL-Nav on a four-wheel mobile robot and conduct comprehensive navigation tasks in various environments of different scales and semantic complexities, indoors and outdoors. Remarkably, VL-Nav operates at a real-time frequency of 30 Hz with a Jetson Orin NX, highlighting its ability to conduct efficient vision-language navigation. Experimental results show that VL-Nav achieves an overall success rate of 86.3%, outperforming previous methods by 44.15%.
iWalker: Imperative Visual Planning for Walking Humanoid Robot
Sep 27, 2024



Humanoid robots, with the potential to perform a broad range of tasks in environments designed for humans, have been deemed crucial for the basis of general AI agents. When talking about planning and controlling, although traditional models and task-specific methods have been extensively studied over the past few decades, they are inadequate for achieving the flexibility and versatility needed for general autonomy. Learning approaches, especially reinforcement learning, are powerful and popular nowadays, but they are inherently "blind" during training, relying heavily on trials in simulation without proper guidance from physical principles or underlying dynamics. In response, we propose a novel end-to-end pipeline that seamlessly integrates perception, planning, and model-based control for humanoid robot walking. We refer to our method as iWalker, which is driven by imperative learning (IL), a self-supervising neuro-symbolic learning framework. This enables the robot to learn from arbitrary unlabeled data, significantly improving its adaptability and generalization capabilities. In experiments, iWalker demonstrates effectiveness in both simulated and real-world environments, representing a significant advancement toward versatile and autonomous humanoid robots.
Imperative Learning: A Self-supervised Neural-Symbolic Learning Framework for Robot Autonomy
Jun 23, 2024



Data-driven methods such as reinforcement and imitation learning have achieved remarkable success in robot autonomy. However, their data-centric nature still hinders them from generalizing well to ever-changing environments. Moreover, collecting large datasets for robotic tasks is often impractical and expensive. To overcome these challenges, we introduce a new self-supervised neural-symbolic (NeSy) computational framework, imperative learning (IL), for robot autonomy, leveraging the generalization abilities of symbolic reasoning. The framework of IL consists of three primary components: a neural module, a reasoning engine, and a memory system. We formulate IL as a special bilevel optimization (BLO), which enables reciprocal learning over the three modules. This overcomes the label-intensive obstacles associated with data-driven approaches and takes advantage of symbolic reasoning concerning logical reasoning, physical principles, geometric analysis, etc. We discuss several optimization techniques for IL and verify their effectiveness in five distinct robot autonomy tasks including path planning, rule induction, optimal control, visual odometry, and multi-robot routing. Through various experiments, we show that IL can significantly enhance robot autonomy capabilities and we anticipate that it will catalyze further research across diverse domains.
PhysORD: A Neuro-Symbolic Approach for Physics-infused Motion Prediction in Off-road Driving
Apr 02, 2024Motion prediction is critical for autonomous off-road driving, however, it presents significantly more challenges than on-road driving because of the complex interaction between the vehicle and the terrain. Traditional physics-based approaches encounter difficulties in accurately modeling dynamic systems and external disturbance. In contrast, data-driven neural networks require extensive datasets and struggle with explicitly capturing the fundamental physical laws, which can easily lead to poor generalization. By merging the advantages of both methods, neuro-symbolic approaches present a promising direction. These methods embed physical laws into neural models, potentially significantly improving generalization capabilities. However, no prior works were evaluated in real-world settings for off-road driving. To bridge this gap, we present PhysORD, a neural-symbolic approach integrating the conservation law, i.e., the Euler-Lagrange equation, into data-driven neural models for motion prediction in off-road driving. Our experiments showed that PhysORD can accurately predict vehicle motion and tolerate external disturbance by modeling uncertainties. It outperforms existing methods both in accuracy and efficiency and demonstrates data-efficient learning and generalization ability in long-term prediction.
PyPose v0.6: The Imperative Programming Interface for Robotics
Sep 22, 2023



PyPose is an open-source library for robot learning. It combines a learning-based approach with physics-based optimization, which enables seamless end-to-end robot learning. It has been used in many tasks due to its meticulously designed application programming interface (API) and efficient implementation. From its initial launch in early 2022, PyPose has experienced significant enhancements, incorporating a wide variety of new features into its platform. To satisfy the growing demand for understanding and utilizing the library and reduce the learning curve of new users, we present the fundamental design principle of the imperative programming interface, and showcase the flexible usage of diverse functionalities and modules using an extremely simple Dubins car example. We also demonstrate that the PyPose can be easily used to navigate a real quadruped robot with a few lines of code.
iSLAM: Imperative SLAM
Jun 14, 2023



Simultaneous localization and mapping (SLAM) stands as one of the critical challenges in robot navigation. Recent advancements suggest that methods based on supervised learning deliver impressive performance in front-end odometry, while traditional optimization-based methods still play a vital role in the back-end for minimizing estimation drift. In this paper, we found that such decoupled paradigm can lead to only sub-optimal performance, consequently curtailing system capabilities and generalization potential. To solve this problem, we proposed a novel self-supervised learning framework, imperative SLAM (iSLAM), which fosters reciprocal correction between the front-end and back-end, thus enhancing performance without necessitating any external supervision. Specifically, we formulate a SLAM system as a bi-level optimization problem so that the two components are bidirectionally connected. As a result, the front-end model is able to learn global geometric knowledge obtained through pose graph optimization by back-propagating the residuals from the back-end. This significantly improves the generalization ability of the entire system and thus achieves the accuracy improvement up to 45%. To the best of our knowledge, iSLAM is the first SLAM system showing that the front-end and back-end can learn jointly and mutually contribute to each other in a self-supervised manner.
PyPose: A Library for Robot Learning with Physics-based Optimization
Sep 30, 2022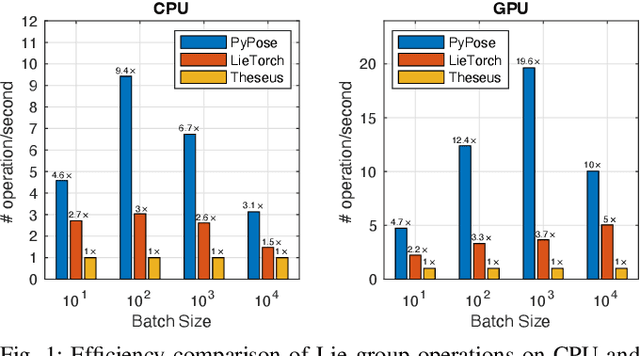
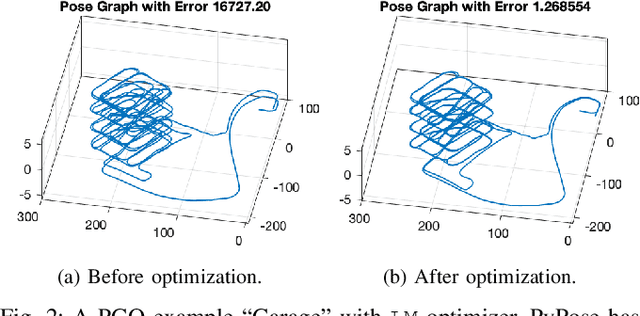
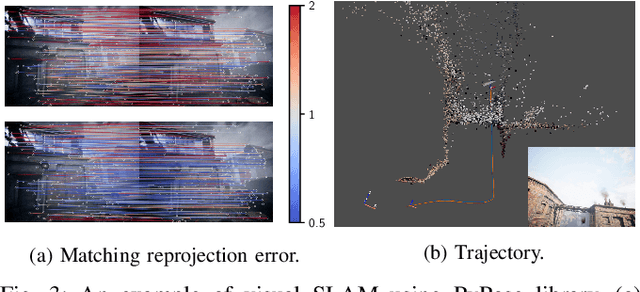
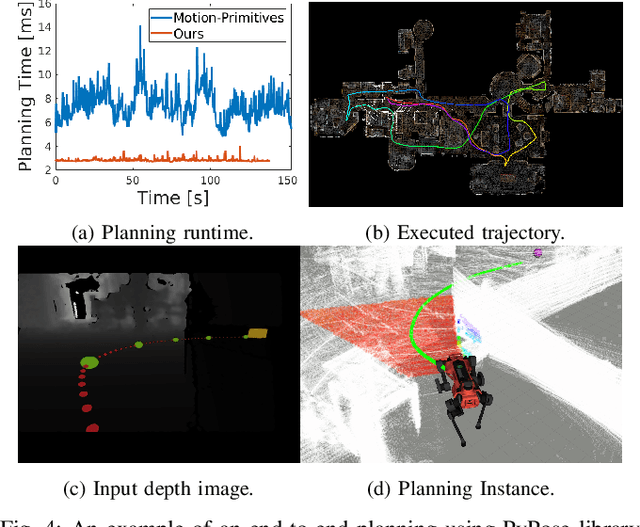
Deep learning has had remarkable success in robotic perception, but its data-centric nature suffers when it comes to generalizing to ever-changing environments. By contrast, physics-based optimization generalizes better, but it does not perform as well in complicated tasks due to the lack of high-level semantic information and the reliance on manual parametric tuning. To take advantage of these two complementary worlds, we present PyPose: a robotics-oriented, PyTorch-based library that combines deep perceptual models with physics-based optimization techniques. Our design goal for PyPose is to make it user-friendly, efficient, and interpretable with a tidy and well-organized architecture. Using an imperative style interface, it can be easily integrated into real-world robotic applications. Besides, it supports parallel computing of any order gradients of Lie groups and Lie algebras and $2^{\text{nd}}$-order optimizers, such as trust region methods. Experiments show that PyPose achieves 3-20$\times$ speedup in computation compared to state-of-the-art libraries. To boost future research, we provide concrete examples across several fields of robotics, including SLAM, inertial navigation, planning, and control.
Targetless Extrinsic Calibration of Stereo Cameras, Thermal Cameras, and Laser Sensors in the Wild
Sep 28, 2021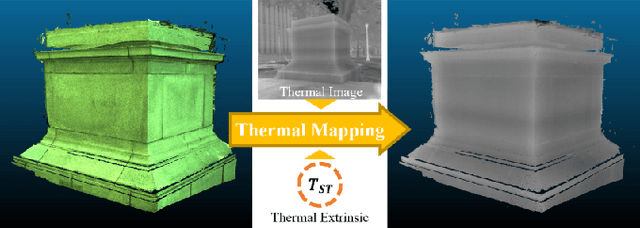
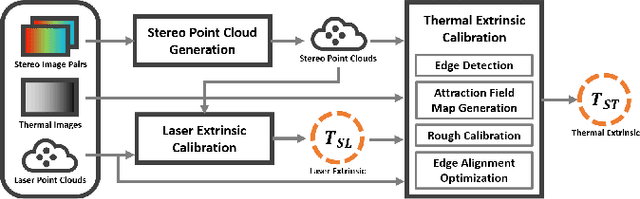

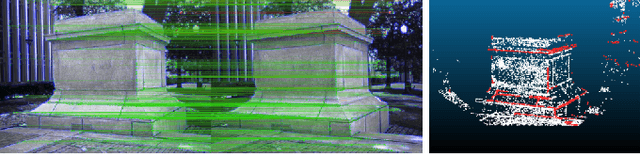
The fusion of multi-modal sensors has become increasingly popular in autonomous driving and intelligent robots since it can provide richer information than any single sensor, enhance reliability in complex environments. Multi-sensor extrinsic calibration is one of the key factors of sensor fusion. However, such calibration is difficult due to the variety of sensor modalities and the requirement of calibration targets and human labor. In this paper, we demonstrate a new targetless cross-modal calibration framework by focusing on the extrinsic transformations among stereo cameras, thermal cameras, and laser sensors. Specifically, the calibration between stereo and laser is conducted in 3D space by minimizing the registration error, while the thermal extrinsic to the other two sensors is estimated by optimizing the alignment of the edge features. Our method requires no dedicated targets and performs the multi-sensor calibration in a single shot without human interaction. Experimental results show that the calibration framework is accurate and applicable in general scenes.