 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeANYmal Parkour: Learning Agile Navigation for Quadrupedal Robots
Jun 26, 2023Performing agile navigation with four-legged robots is a challenging task due to the highly dynamic motions, contacts with various parts of the robot, and the limited field of view of the perception sensors. In this paper, we propose a fully-learned approach to train such robots and conquer scenarios that are reminiscent of parkour challenges. The method involves training advanced locomotion skills for several types of obstacles, such as walking, jumping, climbing, and crouching, and then using a high-level policy to select and control those skills across the terrain. Thanks to our hierarchical formulation, the navigation policy is aware of the capabilities of each skill, and it will adapt its behavior depending on the scenario at hand. Additionally, a perception module is trained to reconstruct obstacles from highly occluded and noisy sensory data and endows the pipeline with scene understanding. Compared to previous attempts, our method can plan a path for challenging scenarios without expert demonstration, offline computation, a priori knowledge of the environment, or taking contacts explicitly into account. While these modules are trained from simulated data only, our real-world experiments demonstrate successful transfer on hardware, where the robot navigates and crosses consecutive challenging obstacles with speeds of up to two meters per second. The supplementary video can be found on the project website: https://sites.google.com/leggedrobotics.com/agile-navigation
Learning-based Design and Control for Quadrupedal Robots with Parallel-Elastic Actuators
Jan 09, 2023



Parallel-elastic joints can improve the efficiency and strength of robots by assisting the actuators with additional torques. For these benefits to be realized, a spring needs to be carefully designed. However, designing robots is an iterative and tedious process, often relying on intuition and heuristics. We introduce a design optimization framework that allows us to co-optimize a parallel elastic knee joint and locomotion controller for quadrupedal robots with minimal human intuition. We design a parallel elastic joint and optimize its parameters with respect to the efficiency in a model-free fashion. In the first step, we train a design-conditioned policy using model-free Reinforcement Learning, capable of controlling the quadruped in the predefined range of design parameters. Afterwards, we use Bayesian Optimization to find the best design using the policy. We use this framework to optimize the parallel-elastic spring parameters for the knee of our quadrupedal robot ANYmal together with the optimal controller. We evaluate the optimized design and controller in real-world experiments over various terrains. Our results show that the new system improves the torque-square efficiency of the robot by 33% compared to the baseline and reduces maximum joint torque by 30% without compromising tracking performance. The improved design resulted in 11% longer operation time on flat terrain.
Keep Rollin' - Whole-Body Motion Control and Planning for Wheeled Quadrupedal Robots
Feb 07, 2019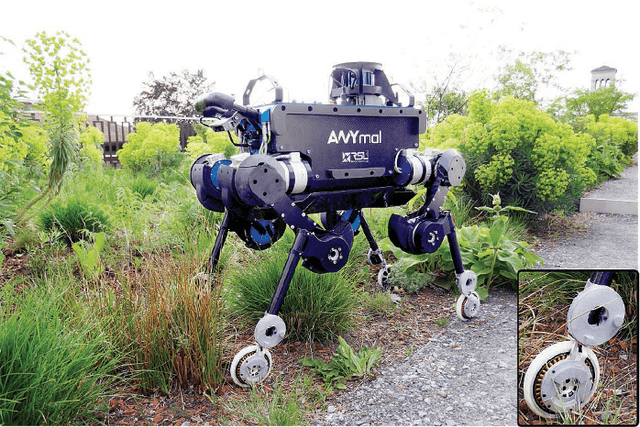
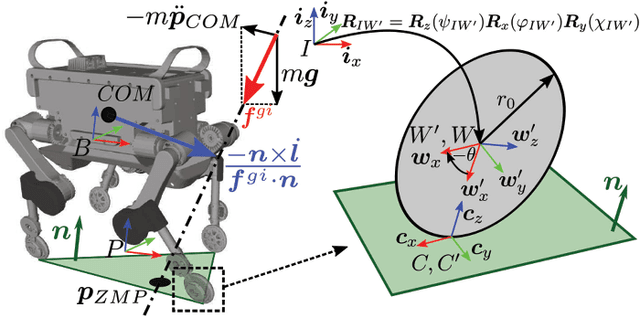
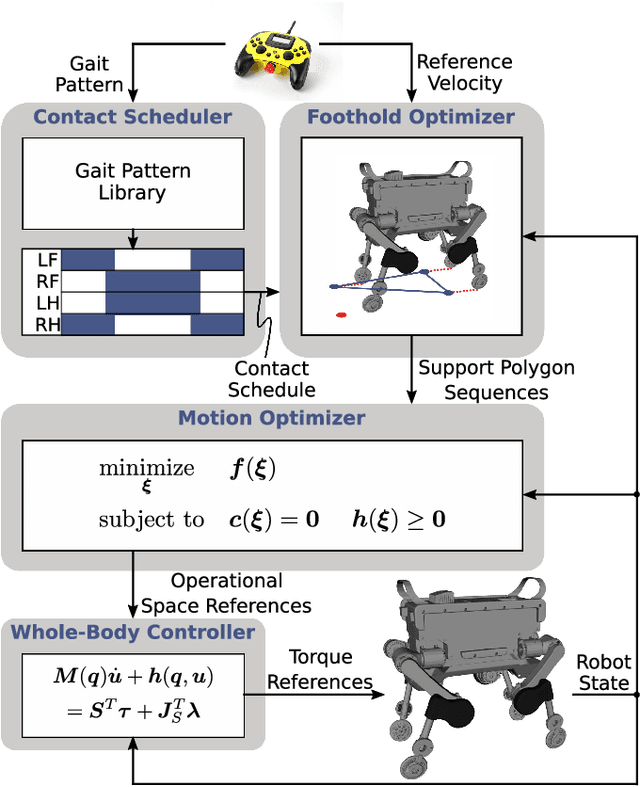
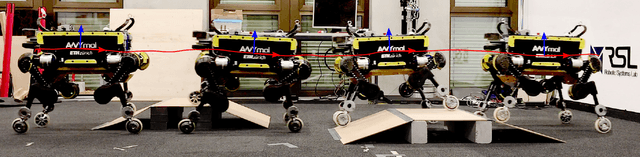
We show dynamic locomotion strategies for wheeled quadrupedal robots, which combine the advantages of both walking and driving. The developed optimization framework tightly integrates the additional degrees of freedom introduced by the wheels. Our approach relies on a zero-moment point based motion optimization which continuously updates reference trajectories. The reference motions are tracked by a hierarchical whole-body controller which computes optimal generalized accelerations and contact forces by solving a sequence of prioritized tasks including the nonholonomic rolling constraints. Our approach has been tested on ANYmal, a quadrupedal robot that is fully torque-controlled including the non-steerable wheels attached to its legs. We conducted experiments on flat and inclined terrains as well as over steps, whereby we show that integrating the wheels into the motion control and planning framework results in intuitive motion trajectories, which enable more robust and dynamic locomotion compared to other wheeled-legged robots. Moreover, with a speed of 4 m/s and a reduction of the cost of transport by 83 % we prove the superiority of wheeled-legged robots compared to their legged counterparts.
* IEEE Robotics and Automation Letters