 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised Learning with a Multi-Task Latent Space Objective
Feb 05, 2026Self-supervised learning (SSL) methods based on Siamese networks learn visual representations by aligning different views of the same image. The multi-crop strategy, which incorporates small local crops to global ones, enhances many SSL frameworks but causes instability in predictor-based architectures such as BYOL, SimSiam, and MoCo v3. We trace this failure to the shared predictor used across all views and demonstrate that assigning a separate predictor to each view type stabilizes multi-crop training, resulting in significant performance gains. Extending this idea, we treat each spatial transformation as a distinct alignment task and add cutout views, where part of the image is masked before encoding. This yields a simple multi-task formulation of asymmetric Siamese SSL that combines global, local, and masked views into a single framework. The approach is stable, generally applicable across backbones, and consistently improves the performance of ResNet and ViT models on ImageNet.
Advances and Innovations in the Multi-Agent Robotic System (MARS) Challenge
Jan 26, 2026Recent advancements in multimodal large language models and vision-languageaction models have significantly driven progress in Embodied AI. As the field transitions toward more complex task scenarios, multi-agent system frameworks are becoming essential for achieving scalable, efficient, and collaborative solutions. This shift is fueled by three primary factors: increasing agent capabilities, enhancing system efficiency through task delegation, and enabling advanced human-agent interactions. To address the challenges posed by multi-agent collaboration, we propose the Multi-Agent Robotic System (MARS) Challenge, held at the NeurIPS 2025 Workshop on SpaVLE. The competition focuses on two critical areas: planning and control, where participants explore multi-agent embodied planning using vision-language models (VLMs) to coordinate tasks and policy execution to perform robotic manipulation in dynamic environments. By evaluating solutions submitted by participants, the challenge provides valuable insights into the design and coordination of embodied multi-agent systems, contributing to the future development of advanced collaborative AI systems.
Chorus: Multi-Teacher Pretraining for Holistic 3D Gaussian Scene Encoding
Dec 22, 2025While 3DGS has emerged as a high-fidelity scene representation, encoding rich, general-purpose features directly from its primitives remains under-explored. We address this gap by introducing Chorus, a multi-teacher pretraining framework that learns a holistic feed-forward 3D Gaussian Splatting (3DGS) scene encoder by distilling complementary signals from 2D foundation models. Chorus employs a shared 3D encoder and teacher-specific projectors to learn from language-aligned, generalist, and object-aware teachers, encouraging a shared embedding space that captures signals from high-level semantics to fine-grained structure. We evaluate Chorus on a wide range of tasks: open-vocabulary semantic and instance segmentation, linear and decoder probing, as well as data-efficient supervision. Besides 3DGS, we also test Chorus on several benchmarks that only support point clouds by pretraining a variant using only Gaussians' centers, colors, estimated normals as inputs. Interestingly, this encoder shows strong transfer and outperforms the point clouds baseline while using 39.9 times fewer training scenes. Finally, we propose a render-and-distill adaptation that facilitates out-of-domain finetuning. Our code and model will be released upon publication.
Video Depth Propagation
Dec 11, 2025



Depth estimation in videos is essential for visual perception in real-world applications. However, existing methods either rely on simple frame-by-frame monocular models, leading to temporal inconsistencies and inaccuracies, or use computationally demanding temporal modeling, unsuitable for real-time applications. These limitations significantly restrict general applicability and performance in practical settings. To address this, we propose VeloDepth, an efficient and robust online video depth estimation pipeline that effectively leverages spatiotemporal priors from previous depth predictions and performs deep feature propagation. Our method introduces a novel Propagation Module that refines and propagates depth features and predictions using flow-based warping coupled with learned residual corrections. In addition, our design structurally enforces temporal consistency, resulting in stable depth predictions across consecutive frames with improved efficiency. Comprehensive zero-shot evaluation on multiple benchmarks demonstrates the state-of-the-art temporal consistency and competitive accuracy of VeloDepth, alongside its significantly faster inference compared to existing video-based depth estimators. VeloDepth thus provides a practical, efficient, and accurate solution for real-time depth estimation suitable for diverse perception tasks. Code and models are available at https://github.com/lpiccinelli-eth/velodepth
Autonomous Vehicle Path Planning by Searching With Differentiable Simulation
Nov 14, 2025



Planning allows an agent to safely refine its actions before executing them in the real world. In autonomous driving, this is crucial to avoid collisions and navigate in complex, dense traffic scenarios. One way to plan is to search for the best action sequence. However, this is challenging when all necessary components - policy, next-state predictor, and critic - have to be learned. Here we propose Differentiable Simulation for Search (DSS), a framework that leverages the differentiable simulator Waymax as both a next state predictor and a critic. It relies on the simulator's hardcoded dynamics, making state predictions highly accurate, while utilizing the simulator's differentiability to effectively search across action sequences. Our DSS agent optimizes its actions using gradient descent over imagined future trajectories. We show experimentally that DSS - the combination of planning gradients and stochastic search - significantly improves tracking and path planning accuracy compared to sequence prediction, imitation learning, model-free RL, and other planning methods.
Multimodal Spatial Reasoning in the Large Model Era: A Survey and Benchmarks
Oct 29, 2025Humans possess spatial reasoning abilities that enable them to understand spaces through multimodal observations, such as vision and sound. Large multimodal reasoning models extend these abilities by learning to perceive and reason, showing promising performance across diverse spatial tasks. However, systematic reviews and publicly available benchmarks for these models remain limited. In this survey, we provide a comprehensive review of multimodal spatial reasoning tasks with large models, categorizing recent progress in multimodal large language models (MLLMs) and introducing open benchmarks for evaluation. We begin by outlining general spatial reasoning, focusing on post-training techniques, explainability, and architecture. Beyond classical 2D tasks, we examine spatial relationship reasoning, scene and layout understanding, as well as visual question answering and grounding in 3D space. We also review advances in embodied AI, including vision-language navigation and action models. Additionally, we consider emerging modalities such as audio and egocentric video, which contribute to novel spatial understanding through new sensors. We believe this survey establishes a solid foundation and offers insights into the growing field of multimodal spatial reasoning. Updated information about this survey, codes and implementation of the open benchmarks can be found at https://github.com/zhengxuJosh/Awesome-Spatial-Reasoning.
EReLiFM: Evidential Reliability-Aware Residual Flow Meta-Learning for Open-Set Domain Generalization under Noisy Labels
Oct 14, 2025



Open-Set Domain Generalization (OSDG) aims to enable deep learning models to recognize unseen categories in new domains, which is crucial for real-world applications. Label noise hinders open-set domain generalization by corrupting source-domain knowledge, making it harder to recognize known classes and reject unseen ones. While existing methods address OSDG under Noisy Labels (OSDG-NL) using hyperbolic prototype-guided meta-learning, they struggle to bridge domain gaps, especially with limited clean labeled data. In this paper, we propose Evidential Reliability-Aware Residual Flow Meta-Learning (EReLiFM). We first introduce an unsupervised two-stage evidential loss clustering method to promote label reliability awareness. Then, we propose a residual flow matching mechanism that models structured domain- and category-conditioned residuals, enabling diverse and uncertainty-aware transfer paths beyond interpolation-based augmentation. During this meta-learning process, the model is optimized such that the update direction on the clean set maximizes the loss decrease on the noisy set, using pseudo labels derived from the most confident predicted class for supervision. Experimental results show that EReLiFM outperforms existing methods on OSDG-NL, achieving state-of-the-art performance. The source code is available at https://github.com/KPeng9510/ERELIFM.
Lost in Translation? Vocabulary Alignment for Source-Free Domain Adaptation in Open-Vocabulary Semantic Segmentation
Sep 18, 2025



We introduce VocAlign, a novel source-free domain adaptation framework specifically designed for VLMs in open-vocabulary semantic segmentation. Our method adopts a student-teacher paradigm enhanced with a vocabulary alignment strategy, which improves pseudo-label generation by incorporating additional class concepts. To ensure efficiency, we use Low-Rank Adaptation (LoRA) to fine-tune the model, preserving its original capabilities while minimizing computational overhead. In addition, we propose a Top-K class selection mechanism for the student model, which significantly reduces memory requirements while further improving adaptation performance. Our approach achieves a notable 6.11 mIoU improvement on the CityScapes dataset and demonstrates superior performance on zero-shot segmentation benchmarks, setting a new standard for source-free adaptation in the open-vocabulary setting.
MARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
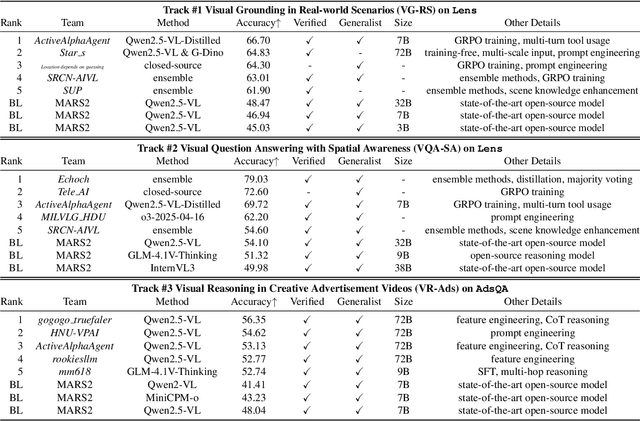

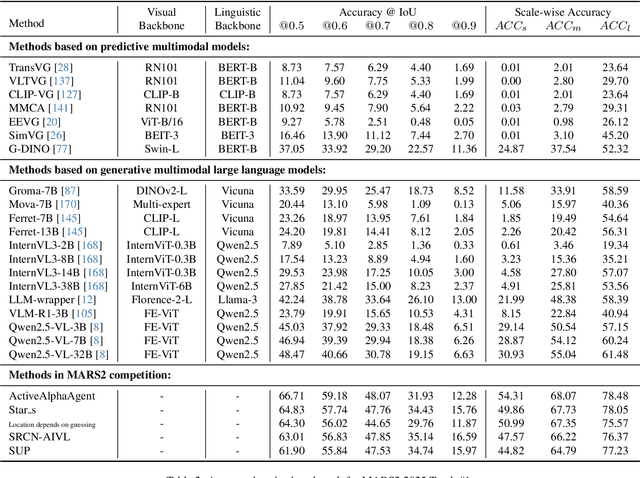
This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.
PANORAMA: The Rise of Omnidirectional Vision in the Embodied AI Era
Sep 16, 2025Omnidirectional vision, using 360-degree vision to understand the environment, has become increasingly critical across domains like robotics, industrial inspection, and environmental monitoring. Compared to traditional pinhole vision, omnidirectional vision provides holistic environmental awareness, significantly enhancing the completeness of scene perception and the reliability of decision-making. However, foundational research in this area has historically lagged behind traditional pinhole vision. This talk presents an emerging trend in the embodied AI era: the rapid development of omnidirectional vision, driven by growing industrial demand and academic interest. We highlight recent breakthroughs in omnidirectional generation, omnidirectional perception, omnidirectional understanding, and related datasets. Drawing on insights from both academia and industry, we propose an ideal panoramic system architecture in the embodied AI era, PANORAMA, which consists of four key subsystems. Moreover, we offer in-depth opinions related to emerging trends and cross-community impacts at the intersection of panoramic vision and embodied AI, along with the future roadmap and open challenges. This overview synthesizes state-of-the-art advancements and outlines challenges and opportunities for future research in building robust, general-purpose omnidirectional AI systems in the embodied AI era.