 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTwo Bridges, One Pathway: From VLMs to Generalizable VLAs with Embodied Trajectory-Coupled Data
Jun 07, 2026Vision-language models (VLMs) are powerful general-purpose reasoners, yet converting them into robot control policies (VLAs) is surprisingly difficult. The root cause is a two-fold gap: VLMs are trained on internet-scale images with language-understanding objectives, while VLAs must perceive robot scenes and predict motor actions. Fine-tuning a VLM directly on robot action data forces the model to cross both gaps at once -- the learning curve is steep and the rich generalizations learned during pretraining tend to degrade rather than transfer. We argue that this gap can be bridged gradually with the right intermediate data. We introduce \emph{embodied trajectory-coupled (ETC) data} -- vision-language supervision derived from the same robot scenes and trajectories used for action learning. Because ETC data shares the visual context of robot operation while retaining familiar language-understanding objectives, it provides a natural stepping stone between VLM pretraining and VLA fine-tuning. Building on this, we design a three-stage training recipe. Distribution Bridging first adapts the VLM to embodied visual-language semantics. Objective Bridging then gradually shifts the model toward action prediction while preserving the acquired representations. Retentive Adaptation finally specializes the policy to the target deployment domain. We further show that mixing task-relevant out-of-distribution ETC data with a small amount of action data enables the model to generalize to novel visual-language conditions without requiring additional robot demonstrations. Simulation and real-robot experiments confirm that this gradual bridging strategy is the key to transferring VLM generalization into robust, deployable robot policies.
SIREN: Unified Multi-Granularity Semantic Interaction for Multi-Modal Lifelong User Interest Modeling
May 25, 2026Industrial recommender systems increasingly leverage lifelong user behavior histories and rich multi-modal content to capture evolving user preferences. However, effectively integrating multi-modal features into lifelong interest modeling remains challenging due to the inherent misalignment between multi-modal and collaborative spaces. Existing paradigms typically rely on separate modeling of multi-modal sequence and behavior sequence, and late fusion to alleviate the modality gap, which results in coarse-grained multi-modal representation and limited integration. In this paper, we propose SIREN, a unified multi-granularity semantic interaction framework for multi-modal lifelong user interest modeling. In the General Search Unit stage, we introduce two alternative retrieval strategies: multi-modal similarity-based soft retrieval for retrieval effectiveness, and Semantic ID (SemID)-based hard retrieval for efficient industrial serving. For the Exact Search Unit stage, we explicitly incorporate target-aware relevance via coarse similarity buckets and fine-grained prefix-encoded SemIDs, enabling unified interaction with collaborative ID features within the target-conditioned transformer architecture. Extensive experiments on the offline dataset demonstrate that SIREN achieves a state-of-the-art GAUC. Online A/B tests further demonstrate consistent GMV gains across multiple production scenarios, including +2.28% in Weixin Moments, +3.87% in Weixin Official Accounts, and +1.61% in Weixin Channels. From July 2025, SIREN has been fully launched for full-traffic serving in Tencent's advertising platform.
FEDIN: Frequency-Enhanced Deep Interest Network for Click-Through Rate Prediction
May 03, 2026Sequential recommendation models often struggle to capture latent periodic patterns in user interests, primarily due to the noise inherent in time-domain behavioral data. While frequency-domain analysis offers a global perspective to address this, existing approaches typically treat user sequences in isolation, overlooking the crucial context of the target item. In this work, we present a novel empirical observation: user attention scores exhibit distinct spectral entropy distributions when conditioned on positive versus negative target items. Specifically, true user interests manifest as highly concentrated spectral patterns with lower entropy in the frequency domain, whereas irrelevant behaviors appear as high-entropy noise. Leveraging this insight, we propose the Frequency-Enhanced Deep Interest Network (FEDIN). FEDIN introduces a frequency-domain branch that utilizes a target-aware spectrum filtering mechanism to isolate these periodic interest signals. Extensive experiments on three public datasets demonstrate that FEDIN consistently outperforms state-of-the-art sequential recommendation baselines, demonstrating superior robustness against noise. We have released our code at: https://github.com/otokoneko/FEDIN.
ESCAPE: Episodic Spatial Memory and Adaptive Execution Policy for Long-Horizon Mobile Manipulation
Apr 15, 2026Coordinating navigation and manipulation with robust performance is essential for embodied AI in complex indoor environments. However, as tasks extend over long horizons, existing methods often struggle due to catastrophic forgetting, spatial inconsistency, and rigid execution. To address these issues, we propose ESCAPE (Episodic Spatial Memory Coupled with an Adaptive Policy for Execution), operating through a tightly coupled perception-grounding-execution workflow. For robust perception, ESCAPE features a Spatio-Temporal Fusion Mapping module to autoregressively construct a depth-free, persistent 3D spatial memory, alongside a Memory-Driven Target Grounding module for precise interaction mask generation. To achieve flexible action, our Adaptive Execution Policy dynamically orchestrates proactive global navigation and reactive local manipulation to seize opportunistic targets. ESCAPE achieves state-of-the-art performance on the ALFRED benchmark, reaching 65.09% and 60.79% success rates in test seen and unseen environments with step-by-step instructions. By reducing redundant exploration, our ESCAPE attains substantial improvements in path-length-weighted metrics and maintains robust performance (61.24% / 56.04%) even without detailed guidance for long-horizon tasks.
GenLCA: 3D Diffusion for Full-Body Avatars from In-the-Wild Videos
Apr 09, 2026We present GenLCA, a diffusion-based generative model for generating and editing photorealistic full-body avatars from text and image inputs. The generated avatars are faithful to the inputs, while supporting high-fidelity facial and full-body animations. The core idea is a novel paradigm that enables training a full-body 3D diffusion model from partially observable 2D data, allowing the training dataset to scale to millions of real-world videos. This scalability contributes to the superior photorealism and generalizability of GenLCA. Specifically, we scale up the dataset by repurposing a pretrained feed-forward avatar reconstruction model as an animatable 3D tokenizer, which encodes unstructured video frames into structured 3D tokens. However, most real-world videos only provide partial observations of body parts, resulting in excessive blurring or transparency artifacts in the 3D tokens. To address this, we propose a novel visibility-aware diffusion training strategy that replaces invalid regions with learnable tokens and computes losses only over valid regions. We then train a flow-based diffusion model on the token dataset, inherently maintaining the photorealism and animatability provided by the pretrained avatar reconstruction model. Our approach effectively enables the use of large-scale real-world video data to train a diffusion model natively in 3D. We demonstrate the efficacy of our method through diverse and high-fidelity generation and editing results, outperforming existing solutions by a large margin. The project page is available at https://onethousandwu.com/GenLCA-Page.
Tencent Advertising Algorithm Challenge 2025: All-Modality Generative Recommendation
Apr 04, 2026Generative recommender systems are rapidly emerging as a new paradigm for recommendation, where collaborative identifiers and/or multi-modal content are mapped into discrete token spaces and user behavior is modelled with autoregressive sequence models. Despite progress on multi-modal recommendation datasets, there is still a lack of public benchmarks that jointly offer large-scale, realistic and fully all-modality data designed specifically for generative recommendation (GR) in industrial advertising. To foster research in this direction, we organised the Tencent Advertising Algorithm Challenge 2025, a global competition built on top of two all-modality datasets for GR: TencentGR-1M and TencentGR-10M. Both datasets are constructed from real de-identified Tencent Ads logs and contain rich collaborative IDs and multi-modal representations extracted with state-of-the-art embedding models. The preliminary track (TencentGR-1M) provides 1 million user sequences with up to 100 interacted items each, where each interaction is labeled with exposure and click signals, while the final track (TencentGR-10M) scales this to 10 million users and explicitly distinguishes between click and conversion events at both the sequence and target level. This paper presents the task definition, data construction process, feature schema, baseline GR model, evaluation protocol, and key findings from top-ranked and award-winning solutions. Our datasets focus on multi-modal sequence generation in an advertising setting and introduce weighted evaluation for high-value conversion events. We release our datasets at https://huggingface.co/datasets/TAAC2025 and baseline implementations at https://github.com/TencentAdvertisingAlgorithmCompetition/baseline_2025 to enable future research on all-modality generative recommendation at an industrial scale. The official website is https://algo.qq.com/2025.
SSKG Hub: An Expert-Guided Platform for LLM-Empowered Sustainability Standards Knowledge Graphs
Feb 28, 2026Sustainability disclosure standards (e.g., GRI, SASB, TCFD, IFRS S2) are comprehensive yet lengthy, terminology-dense, and highly cross-referential, hindering structured analysis and downstream use. We present SSKG Hub (Sustainability Standards Knowledge Graph Hub), a research prototype and interactive web platform that transforms standards into auditable knowledge graphs (KGs) through an LLM-centered, expert-guided pipeline. The system integrates automatic standard identification, configurable chunking, standard-specific prompting, robust triple parsing, and provenance-aware Neo4j storage with fine-grained audit metadata. LLM extraction produces a provenance-linked Draft KG, which is reviewed, curated, and formally promoted to a Certified KG through meta-expert adjudication. A role-based governance framework covering read-only guest access, expert review and CRUD operations, meta-expert certification, and administrative oversight ensures traceability and accountability across draft and certified states. Beyond graph exploration and triple-level evidence tracing, SSKG Hub supports cross-KG fusion, KG-driven tasks, and dedicated modules for insights and curated resources. We validate the platform through a comprehensive expert-led KG review case study that demonstrates end-to-end curation and quality assurance. The web application is publicly available at www.sskg-hub.com.
GeoPredict: Leveraging Predictive Kinematics and 3D Gaussian Geometry for Precise VLA Manipulation
Dec 18, 2025Vision-Language-Action (VLA) models achieve strong generalization in robotic manipulation but remain largely reactive and 2D-centric, making them unreliable in tasks that require precise 3D reasoning. We propose GeoPredict, a geometry-aware VLA framework that augments a continuous-action policy with predictive kinematic and geometric priors. GeoPredict introduces a trajectory-level module that encodes motion history and predicts multi-step 3D keypoint trajectories of robot arms, and a predictive 3D Gaussian geometry module that forecasts workspace geometry with track-guided refinement along future keypoint trajectories. These predictive modules serve exclusively as training-time supervision through depth-based rendering, while inference requires only lightweight additional query tokens without invoking any 3D decoding. Experiments on RoboCasa Human-50, LIBERO, and real-world manipulation tasks show that GeoPredict consistently outperforms strong VLA baselines, especially in geometry-intensive and spatially demanding scenarios.
Large Foundation Model for Ads Recommendation
Aug 20, 2025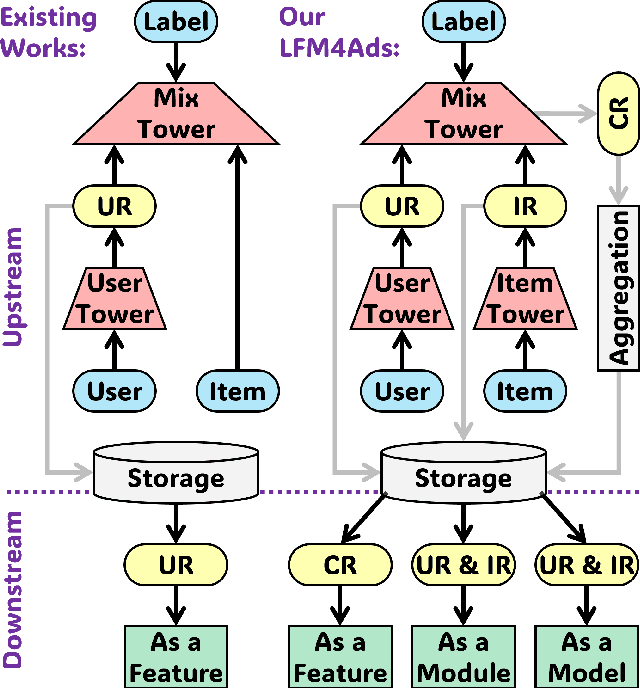
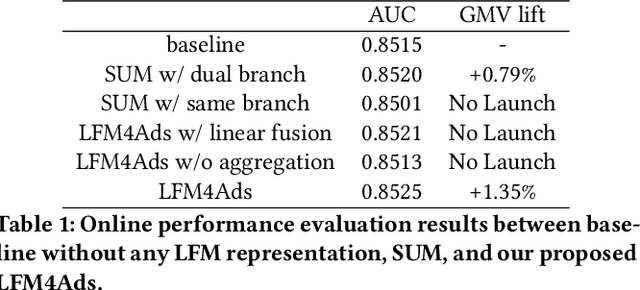
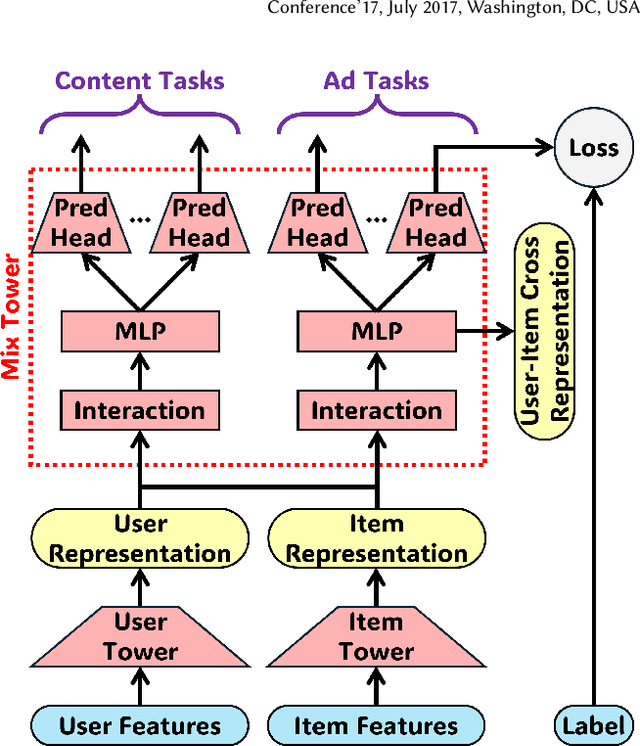
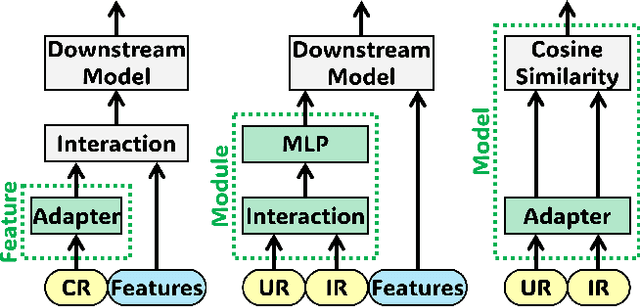
Online advertising relies on accurate recommendation models, with recent advances using pre-trained large-scale foundation models (LFMs) to capture users' general interests across multiple scenarios and tasks. However, existing methods have critical limitations: they extract and transfer only user representations (URs), ignoring valuable item representations (IRs) and user-item cross representations (CRs); and they simply use a UR as a feature in downstream applications, which fails to bridge upstream-downstream gaps and overlooks more transfer granularities. In this paper, we propose LFM4Ads, an All-Representation Multi-Granularity transfer framework for ads recommendation. It first comprehensively transfers URs, IRs, and CRs, i.e., all available representations in the pre-trained foundation model. To effectively utilize the CRs, it identifies the optimal extraction layer and aggregates them into transferable coarse-grained forms. Furthermore, we enhance the transferability via multi-granularity mechanisms: non-linear adapters for feature-level transfer, an Isomorphic Interaction Module for module-level transfer, and Standalone Retrieval for model-level transfer. LFM4Ads has been successfully deployed in Tencent's industrial-scale advertising platform, processing tens of billions of daily samples while maintaining terabyte-scale model parameters with billions of sparse embedding keys across approximately two thousand features. Since its production deployment in Q4 2024, LFM4Ads has achieved 10+ successful production launches across various advertising scenarios, including primary ones like Weixin Moments and Channels. These launches achieve an overall GMV lift of 2.45% across the entire platform, translating to estimated annual revenue increases in the hundreds of millions of dollars.
DGS-LRM: Real-Time Deformable 3D Gaussian Reconstruction From Monocular Videos
Jun 11, 2025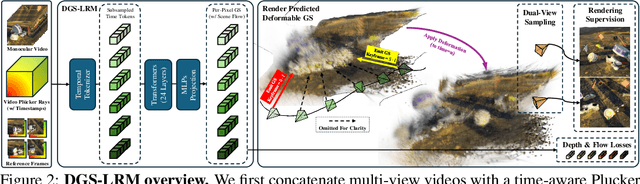
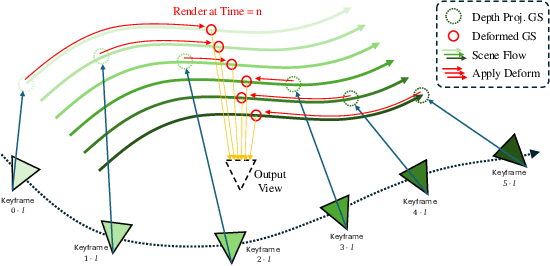
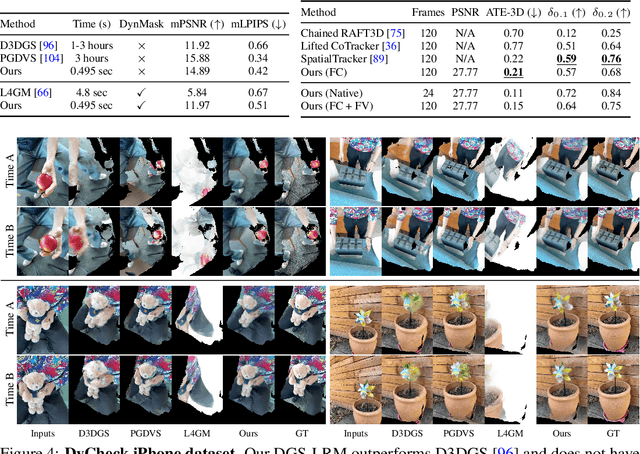
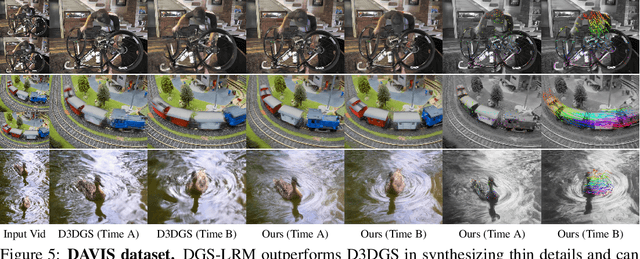
We introduce the Deformable Gaussian Splats Large Reconstruction Model (DGS-LRM), the first feed-forward method predicting deformable 3D Gaussian splats from a monocular posed video of any dynamic scene. Feed-forward scene reconstruction has gained significant attention for its ability to rapidly create digital replicas of real-world environments. However, most existing models are limited to static scenes and fail to reconstruct the motion of moving objects. Developing a feed-forward model for dynamic scene reconstruction poses significant challenges, including the scarcity of training data and the need for appropriate 3D representations and training paradigms. To address these challenges, we introduce several key technical contributions: an enhanced large-scale synthetic dataset with ground-truth multi-view videos and dense 3D scene flow supervision; a per-pixel deformable 3D Gaussian representation that is easy to learn, supports high-quality dynamic view synthesis, and enables long-range 3D tracking; and a large transformer network that achieves real-time, generalizable dynamic scene reconstruction. Extensive qualitative and quantitative experiments demonstrate that DGS-LRM achieves dynamic scene reconstruction quality comparable to optimization-based methods, while significantly outperforming the state-of-the-art predictive dynamic reconstruction method on real-world examples. Its predicted physically grounded 3D deformation is accurate and can readily adapt for long-range 3D tracking tasks, achieving performance on par with state-of-the-art monocular video 3D tracking methods.