 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Learn Faster from Human Feedback with Language Model Predictive Control
Feb 18, 2024



Large language models (LLMs) have been shown to exhibit a wide range of capabilities, such as writing robot code from language commands -- enabling non-experts to direct robot behaviors, modify them based on feedback, or compose them to perform new tasks. However, these capabilities (driven by in-context learning) are limited to short-term interactions, where users' feedback remains relevant for only as long as it fits within the context size of the LLM, and can be forgotten over longer interactions. In this work, we investigate fine-tuning the robot code-writing LLMs, to remember their in-context interactions and improve their teachability i.e., how efficiently they adapt to human inputs (measured by average number of corrections before the user considers the task successful). Our key observation is that when human-robot interactions are formulated as a partially observable Markov decision process (in which human language inputs are observations, and robot code outputs are actions), then training an LLM to complete previous interactions can be viewed as training a transition dynamics model -- that can be combined with classic robotics techniques such as model predictive control (MPC) to discover shorter paths to success. This gives rise to Language Model Predictive Control (LMPC), a framework that fine-tunes PaLM 2 to improve its teachability on 78 tasks across 5 robot embodiments -- improving non-expert teaching success rates of unseen tasks by 26.9% while reducing the average number of human corrections from 2.4 to 1.9. Experiments show that LMPC also produces strong meta-learners, improving the success rate of in-context learning new tasks on unseen robot embodiments and APIs by 31.5%. See videos, code, and demos at: https://robot-teaching.github.io/.
Geometry Matching for Multi-Embodiment Grasping
Dec 06, 2023



Many existing learning-based grasping approaches concentrate on a single embodiment, provide limited generalization to higher DoF end-effectors and cannot capture a diverse set of grasp modes. We tackle the problem of grasping using multiple embodiments by learning rich geometric representations for both objects and end-effectors using Graph Neural Networks. Our novel method - GeoMatch - applies supervised learning on grasping data from multiple embodiments, learning end-to-end contact point likelihood maps as well as conditional autoregressive predictions of grasps keypoint-by-keypoint. We compare our method against baselines that support multiple embodiments. Our approach performs better across three end-effectors, while also producing diverse grasps. Examples, including real robot demos, can be found at geo-match.github.io.
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
Video Language Planning
Oct 16, 2023We are interested in enabling visual planning for complex long-horizon tasks in the space of generated videos and language, leveraging recent advances in large generative models pretrained on Internet-scale data. To this end, we present video language planning (VLP), an algorithm that consists of a tree search procedure, where we train (i) vision-language models to serve as both policies and value functions, and (ii) text-to-video models as dynamics models. VLP takes as input a long-horizon task instruction and current image observation, and outputs a long video plan that provides detailed multimodal (video and language) specifications that describe how to complete the final task. VLP scales with increasing computation budget where more computation time results in improved video plans, and is able to synthesize long-horizon video plans across different robotics domains: from multi-object rearrangement, to multi-camera bi-arm dexterous manipulation. Generated video plans can be translated into real robot actions via goal-conditioned policies, conditioned on each intermediate frame of the generated video. Experiments show that VLP substantially improves long-horizon task success rates compared to prior methods on both simulated and real robots (across 3 hardware platforms).
Learning Interactive Real-World Simulators
Oct 09, 2023



Generative models trained on internet data have revolutionized how text, image, and video content can be created. Perhaps the next milestone for generative models is to simulate realistic experience in response to actions taken by humans, robots, and other interactive agents. Applications of a real-world simulator range from controllable content creation in games and movies, to training embodied agents purely in simulation that can be directly deployed in the real world. We explore the possibility of learning a universal simulator (UniSim) of real-world interaction through generative modeling. We first make the important observation that natural datasets available for learning a real-world simulator are often rich along different axes (e.g., abundant objects in image data, densely sampled actions in robotics data, and diverse movements in navigation data). With careful orchestration of diverse datasets, each providing a different aspect of the overall experience, UniSim can emulate how humans and agents interact with the world by simulating the visual outcome of both high-level instructions such as "open the drawer" and low-level controls such as "move by x, y" from otherwise static scenes and objects. There are numerous use cases for such a real-world simulator. As an example, we use UniSim to train both high-level vision-language planners and low-level reinforcement learning policies, each of which exhibit zero-shot real-world transfer after training purely in a learned real-world simulator. We also show that other types of intelligence such as video captioning models can benefit from training with simulated experience in UniSim, opening up even wider applications. Video demos can be found at https://universal-simulator.github.io.
PaLM-E: An Embodied Multimodal Language Model
Mar 06, 2023



Large language models excel at a wide range of complex tasks. However, enabling general inference in the real world, e.g., for robotics problems, raises the challenge of grounding. We propose embodied language models to directly incorporate real-world continuous sensor modalities into language models and thereby establish the link between words and percepts. Input to our embodied language model are multi-modal sentences that interleave visual, continuous state estimation, and textual input encodings. We train these encodings end-to-end, in conjunction with a pre-trained large language model, for multiple embodied tasks including sequential robotic manipulation planning, visual question answering, and captioning. Our evaluations show that PaLM-E, a single large embodied multimodal model, can address a variety of embodied reasoning tasks, from a variety of observation modalities, on multiple embodiments, and further, exhibits positive transfer: the model benefits from diverse joint training across internet-scale language, vision, and visual-language domains. Our largest model, PaLM-E-562B with 562B parameters, in addition to being trained on robotics tasks, is a visual-language generalist with state-of-the-art performance on OK-VQA, and retains generalist language capabilities with increasing scale.
Scaling Robot Learning with Semantically Imagined Experience
Feb 22, 2023



Recent advances in robot learning have shown promise in enabling robots to perform a variety of manipulation tasks and generalize to novel scenarios. One of the key contributing factors to this progress is the scale of robot data used to train the models. To obtain large-scale datasets, prior approaches have relied on either demonstrations requiring high human involvement or engineering-heavy autonomous data collection schemes, both of which are challenging to scale. To mitigate this issue, we propose an alternative route and leverage text-to-image foundation models widely used in computer vision and natural language processing to obtain meaningful data for robot learning without requiring additional robot data. We term our method Robot Learning with Semantically Imagened Experience (ROSIE). Specifically, we make use of the state of the art text-to-image diffusion models and perform aggressive data augmentation on top of our existing robotic manipulation datasets via inpainting various unseen objects for manipulation, backgrounds, and distractors with text guidance. Through extensive real-world experiments, we show that manipulation policies trained on data augmented this way are able to solve completely unseen tasks with new objects and can behave more robustly w.r.t. novel distractors. In addition, we find that we can improve the robustness and generalization of high-level robot learning tasks such as success detection through training with the diffusion-based data augmentation. The project's website and videos can be found at diffusion-rosie.github.io
Robotic Skill Acquisition via Instruction Augmentation with Vision-Language Models
Nov 22, 2022In recent years, much progress has been made in learning robotic manipulation policies that follow natural language instructions. Such methods typically learn from corpora of robot-language data that was either collected with specific tasks in mind or expensively re-labelled by humans with rich language descriptions in hindsight. Recently, large-scale pretrained vision-language models (VLMs) like CLIP or ViLD have been applied to robotics for learning representations and scene descriptors. Can these pretrained models serve as automatic labelers for robot data, effectively importing Internet-scale knowledge into existing datasets to make them useful even for tasks that are not reflected in their ground truth annotations? To accomplish this, we introduce Data-driven Instruction Augmentation for Language-conditioned control (DIAL): we utilize semi-supervised language labels leveraging the semantic understanding of CLIP to propagate knowledge onto large datasets of unlabelled demonstration data and then train language-conditioned policies on the augmented datasets. This method enables cheaper acquisition of useful language descriptions compared to expensive human labels, allowing for more efficient label coverage of large-scale datasets. We apply DIAL to a challenging real-world robotic manipulation domain where 96.5% of the 80,000 demonstrations do not contain crowd-sourced language annotations. DIAL enables imitation learning policies to acquire new capabilities and generalize to 60 novel instructions unseen in the original dataset.
Contrastive Value Learning: Implicit Models for Simple Offline RL
Nov 03, 2022Model-based reinforcement learning (RL) methods are appealing in the offline setting because they allow an agent to reason about the consequences of actions without interacting with the environment. Prior methods learn a 1-step dynamics model, which predicts the next state given the current state and action. These models do not immediately tell the agent which actions to take, but must be integrated into a larger RL framework. Can we model the environment dynamics in a different way, such that the learned model does directly indicate the value of each action? In this paper, we propose Contrastive Value Learning (CVL), which learns an implicit, multi-step model of the environment dynamics. This model can be learned without access to reward functions, but nonetheless can be used to directly estimate the value of each action, without requiring any TD learning. Because this model represents the multi-step transitions implicitly, it avoids having to predict high-dimensional observations and thus scales to high-dimensional tasks. Our experiments demonstrate that CVL outperforms prior offline RL methods on complex continuous control benchmarks.
Interactive Language: Talking to Robots in Real Time
Oct 12, 2022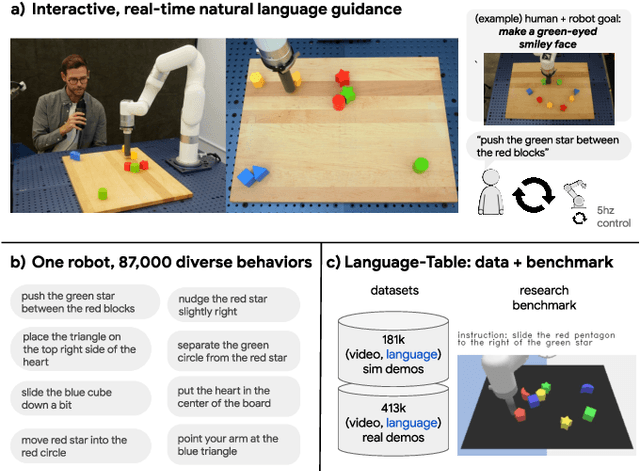
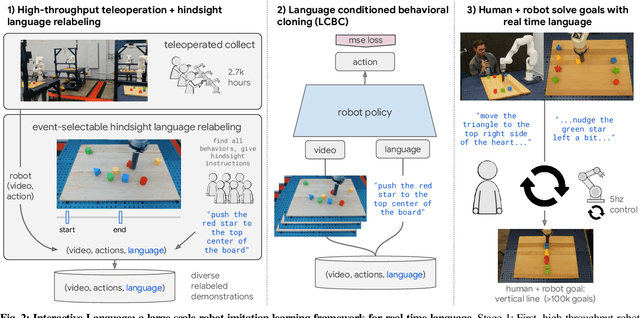
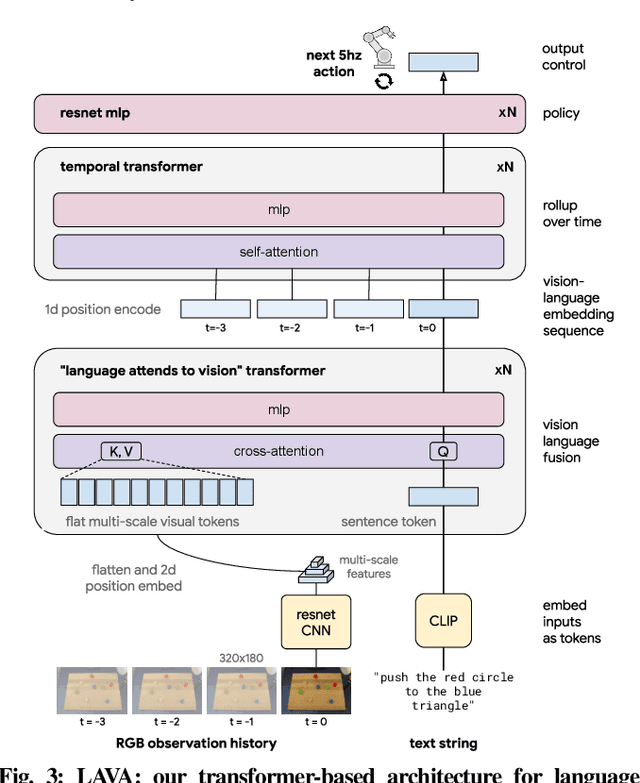
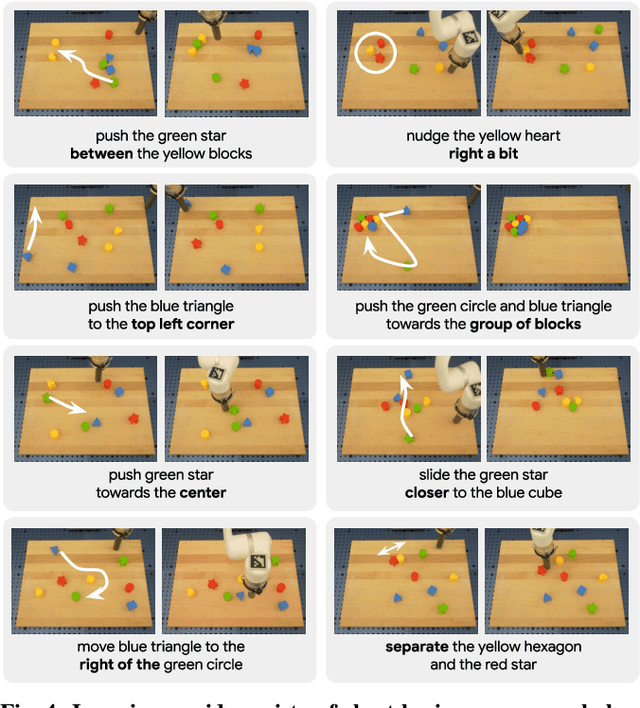
We present a framework for building interactive, real-time, natural language-instructable robots in the real world, and we open source related assets (dataset, environment, benchmark, and policies). Trained with behavioral cloning on a dataset of hundreds of thousands of language-annotated trajectories, a produced policy can proficiently execute an order of magnitude more commands than previous works: specifically we estimate a 93.5% success rate on a set of 87,000 unique natural language strings specifying raw end-to-end visuo-linguo-motor skills in the real world. We find that the same policy is capable of being guided by a human via real-time language to address a wide range of precise long-horizon rearrangement goals, e.g. "make a smiley face out of blocks". The dataset we release comprises nearly 600,000 language-labeled trajectories, an order of magnitude larger than prior available datasets. We hope the demonstrated results and associated assets enable further advancement of helpful, capable, natural-language-interactable robots. See videos at https://interactive-language.github.io.