 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemma: Open Models Based on Gemini Research and Technology
Mar 13, 2024



This work introduces Gemma, a family of lightweight, state-of-the art open models built from the research and technology used to create Gemini models. Gemma models demonstrate strong performance across academic benchmarks for language understanding, reasoning, and safety. We release two sizes of models (2 billion and 7 billion parameters), and provide both pretrained and fine-tuned checkpoints. Gemma outperforms similarly sized open models on 11 out of 18 text-based tasks, and we present comprehensive evaluations of safety and responsibility aspects of the models, alongside a detailed description of model development. We believe the responsible release of LLMs is critical for improving the safety of frontier models, and for enabling the next wave of LLM innovations.
Gemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
Guide Your Agent with Adaptive Multimodal Rewards
Sep 19, 2023Developing an agent capable of adapting to unseen environments remains a difficult challenge in imitation learning. In this work, we present Adaptive Return-conditioned Policy (ARP), an efficient framework designed to enhance the agent's generalization ability using natural language task descriptions and pre-trained multimodal encoders. Our key idea is to calculate a similarity between visual observations and natural language instructions in the pre-trained multimodal embedding space (such as CLIP) and use it as a reward signal. We then train a return-conditioned policy using expert demonstrations labeled with multimodal rewards. Because the multimodal rewards provide adaptive signals at each timestep, our ARP effectively mitigates the goal misgeneralization. This results in superior generalization performances even when faced with unseen text instructions, compared to existing text-conditioned policies. To improve the quality of rewards, we also introduce a fine-tuning method for pre-trained multimodal encoders, further enhancing the performance. Video demonstrations and source code are available on the project website: https://sites.google.com/view/2023arp.
RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control
Jul 28, 2023We study how vision-language models trained on Internet-scale data can be incorporated directly into end-to-end robotic control to boost generalization and enable emergent semantic reasoning. Our goal is to enable a single end-to-end trained model to both learn to map robot observations to actions and enjoy the benefits of large-scale pretraining on language and vision-language data from the web. To this end, we propose to co-fine-tune state-of-the-art vision-language models on both robotic trajectory data and Internet-scale vision-language tasks, such as visual question answering. In contrast to other approaches, we propose a simple, general recipe to achieve this goal: in order to fit both natural language responses and robotic actions into the same format, we express the actions as text tokens and incorporate them directly into the training set of the model in the same way as natural language tokens. We refer to such category of models as vision-language-action models (VLA) and instantiate an example of such a model, which we call RT-2. Our extensive evaluation (6k evaluation trials) shows that our approach leads to performant robotic policies and enables RT-2 to obtain a range of emergent capabilities from Internet-scale training. This includes significantly improved generalization to novel objects, the ability to interpret commands not present in the robot training data (such as placing an object onto a particular number or icon), and the ability to perform rudimentary reasoning in response to user commands (such as picking up the smallest or largest object, or the one closest to another object). We further show that incorporating chain of thought reasoning allows RT-2 to perform multi-stage semantic reasoning, for example figuring out which object to pick up for use as an improvised hammer (a rock), or which type of drink is best suited for someone who is tired (an energy drink).
Decomposing the Generalization Gap in Imitation Learning for Visual Robotic Manipulation
Jul 07, 2023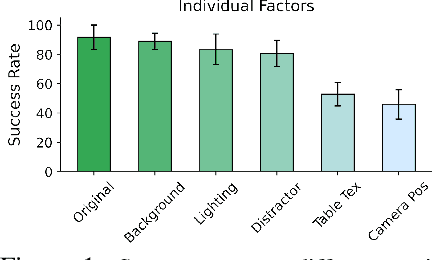
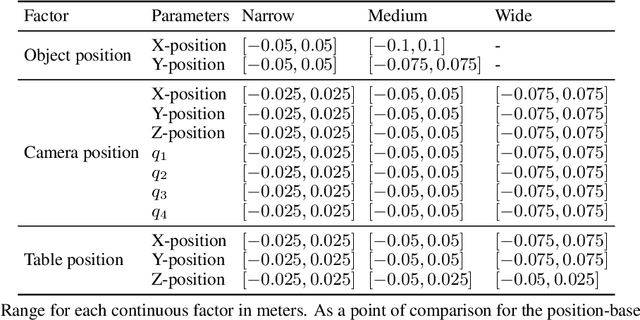
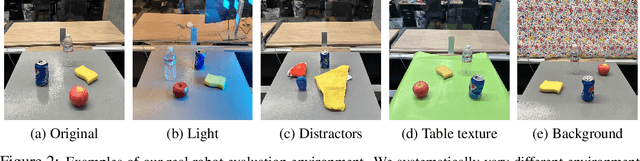
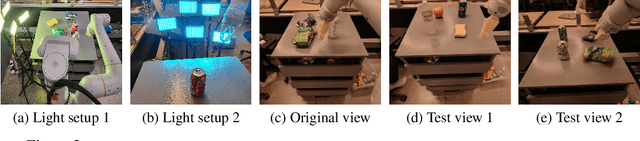
What makes generalization hard for imitation learning in visual robotic manipulation? This question is difficult to approach at face value, but the environment from the perspective of a robot can often be decomposed into enumerable factors of variation, such as the lighting conditions or the placement of the camera. Empirically, generalization to some of these factors have presented a greater obstacle than others, but existing work sheds little light on precisely how much each factor contributes to the generalization gap. Towards an answer to this question, we study imitation learning policies in simulation and on a real robot language-conditioned manipulation task to quantify the difficulty of generalization to different (sets of) factors. We also design a new simulated benchmark of 19 tasks with 11 factors of variation to facilitate more controlled evaluations of generalization. From our study, we determine an ordering of factors based on generalization difficulty, that is consistent across simulation and our real robot setup.
Barkour: Benchmarking Animal-level Agility with Quadruped Robots
May 24, 2023



Animals have evolved various agile locomotion strategies, such as sprinting, leaping, and jumping. There is a growing interest in developing legged robots that move like their biological counterparts and show various agile skills to navigate complex environments quickly. Despite the interest, the field lacks systematic benchmarks to measure the performance of control policies and hardware in agility. We introduce the Barkour benchmark, an obstacle course to quantify agility for legged robots. Inspired by dog agility competitions, it consists of diverse obstacles and a time based scoring mechanism. This encourages researchers to develop controllers that not only move fast, but do so in a controllable and versatile way. To set strong baselines, we present two methods for tackling the benchmark. In the first approach, we train specialist locomotion skills using on-policy reinforcement learning methods and combine them with a high-level navigation controller. In the second approach, we distill the specialist skills into a Transformer-based generalist locomotion policy, named Locomotion-Transformer, that can handle various terrains and adjust the robot's gait based on the perceived environment and robot states. Using a custom-built quadruped robot, we demonstrate that our method can complete the course at half the speed of a dog. We hope that our work represents a step towards creating controllers that enable robots to reach animal-level agility.
Instruction-Following Agents with Jointly Pre-Trained Vision-Language Models
Oct 24, 2022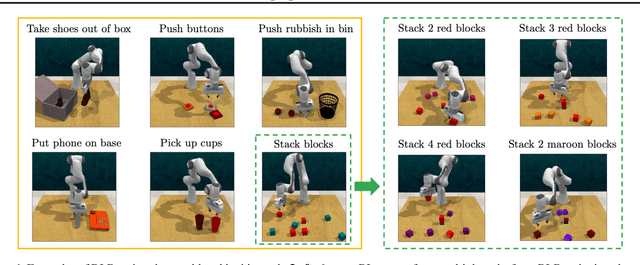
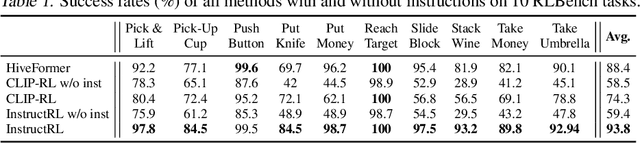
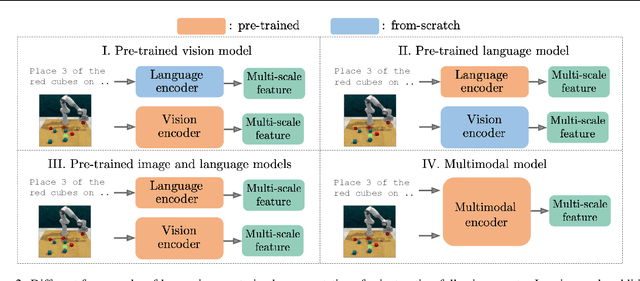

Humans are excellent at understanding language and vision to accomplish a wide range of tasks. In contrast, creating general instruction-following embodied agents remains a difficult challenge. Prior work that uses pure language-only models lack visual grounding, making it difficult to connect language instructions with visual observations. On the other hand, methods that use pre-trained vision-language models typically come with divided language and visual representations, requiring designing specialized network architecture to fuse them together. We propose a simple yet effective model for robots to solve instruction-following tasks in vision-based environments. Our \ours method consists of a multimodal transformer that encodes visual observations and language instructions, and a policy transformer that predicts actions based on encoded representations. The multimodal transformer is pre-trained on millions of image-text pairs and natural language text, thereby producing generic cross-modal representations of observations and instructions. The policy transformer keeps track of the full history of observations and actions, and predicts actions autoregressively. We show that this unified transformer model outperforms all state-of-the-art pre-trained or trained-from-scratch methods in both single-task and multi-task settings. Our model also shows better model scalability and generalization ability than prior work.
FCM: Forgetful Causal Masking Makes Causal Language Models Better Zero-Shot Learners
Oct 24, 2022



Large language models (LLM) trained using the next-token-prediction objective, such as GPT3 and PaLM, have revolutionized natural language processing in recent years by showing impressive zero-shot and few-shot capabilities across a wide range of tasks. In this work, we propose a simple technique that significantly boosts the performance of LLMs without adding computational cost. Our key observation is that, by performing the next token prediction task with randomly selected past tokens masked out, we can improve the quality of the learned representations for downstream language understanding tasks. We hypothesize that randomly masking past tokens prevents over-attending to recent tokens and encourages attention to tokens in the distant past. By randomly masking input tokens in the PaLM model, we show that we can significantly improve 1B and 8B PaLM's zero-shot performance on the SuperGLUE benchmark from 55.7 to 59.2 and from 61.6 to 64.0, respectively. Our largest 8B model matches the score of PaLM with an average score of 64, despite the fact that PaLM is trained on a much larger dataset (780B tokens) of high-quality conversation and webpage data, while ours is trained on the smaller C4 dataset (180B tokens). Experimental results show that our method also improves PaLM's zero and few-shot performance on a diverse suite of tasks, including commonsense reasoning, natural language inference and cloze completion. Moreover, we show that our technique also helps representation learning, significantly improving PaLM's finetuning results.