 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoT-VLA: Visual Chain-of-Thought Reasoning for Vision-Language-Action Models
Mar 27, 2025



Vision-language-action models (VLAs) have shown potential in leveraging pretrained vision-language models and diverse robot demonstrations for learning generalizable sensorimotor control. While this paradigm effectively utilizes large-scale data from both robotic and non-robotic sources, current VLAs primarily focus on direct input--output mappings, lacking the intermediate reasoning steps crucial for complex manipulation tasks. As a result, existing VLAs lack temporal planning or reasoning capabilities. In this paper, we introduce a method that incorporates explicit visual chain-of-thought (CoT) reasoning into vision-language-action models (VLAs) by predicting future image frames autoregressively as visual goals before generating a short action sequence to achieve these goals. We introduce CoT-VLA, a state-of-the-art 7B VLA that can understand and generate visual and action tokens. Our experimental results demonstrate that CoT-VLA achieves strong performance, outperforming the state-of-the-art VLA model by 17% in real-world manipulation tasks and 6% in simulation benchmarks. Project website: https://cot-vla.github.io/
* Project website: https://cot-vla.github.io/
UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric Whole-body Controllers
Jul 14, 2024



We introduce UMI-on-Legs, a new framework that combines real-world and simulation data for quadruped manipulation systems. We scale task-centric data collection in the real world using a hand-held gripper (UMI), providing a cheap way to demonstrate task-relevant manipulation skills without a robot. Simultaneously, we scale robot-centric data in simulation by training whole-body controller for task-tracking without task simulation setups. The interface between these two policies is end-effector trajectories in the task frame, inferred by the manipulation policy and passed to the whole-body controller for tracking. We evaluate UMI-on-Legs on prehensile, non-prehensile, and dynamic manipulation tasks, and report over 70% success rate on all tasks. Lastly, we demonstrate the zero-shot cross-embodiment deployment of a pre-trained manipulation policy checkpoint from prior work, originally intended for a fixed-base robot arm, on our quadruped system. We believe this framework provides a scalable path towards learning expressive manipulation skills on dynamic robot embodiments. Please checkout our website for robot videos, code, and data: https://umi-on-legs.github.io
Mobility VLA: Multimodal Instruction Navigation with Long-Context VLMs and Topological Graphs
Jul 10, 2024



An elusive goal in navigation research is to build an intelligent agent that can understand multimodal instructions including natural language and image, and perform useful navigation. To achieve this, we study a widely useful category of navigation tasks we call Multimodal Instruction Navigation with demonstration Tours (MINT), in which the environment prior is provided through a previously recorded demonstration video. Recent advances in Vision Language Models (VLMs) have shown a promising path in achieving this goal as it demonstrates capabilities in perceiving and reasoning about multimodal inputs. However, VLMs are typically trained to predict textual output and it is an open research question about how to best utilize them in navigation. To solve MINT, we present Mobility VLA, a hierarchical Vision-Language-Action (VLA) navigation policy that combines the environment understanding and common sense reasoning power of long-context VLMs and a robust low-level navigation policy based on topological graphs. The high-level policy consists of a long-context VLM that takes the demonstration tour video and the multimodal user instruction as input to find the goal frame in the tour video. Next, a low-level policy uses the goal frame and an offline constructed topological graph to generate robot actions at every timestep. We evaluated Mobility VLA in a 836m^2 real world environment and show that Mobility VLA has a high end-to-end success rates on previously unsolved multimodal instructions such as "Where should I return this?" while holding a plastic bin.
HumanPlus: Humanoid Shadowing and Imitation from Humans
Jun 15, 2024One of the key arguments for building robots that have similar form factors to human beings is that we can leverage the massive human data for training. Yet, doing so has remained challenging in practice due to the complexities in humanoid perception and control, lingering physical gaps between humanoids and humans in morphologies and actuation, and lack of a data pipeline for humanoids to learn autonomous skills from egocentric vision. In this paper, we introduce a full-stack system for humanoids to learn motion and autonomous skills from human data. We first train a low-level policy in simulation via reinforcement learning using existing 40-hour human motion datasets. This policy transfers to the real world and allows humanoid robots to follow human body and hand motion in real time using only a RGB camera, i.e. shadowing. Through shadowing, human operators can teleoperate humanoids to collect whole-body data for learning different tasks in the real world. Using the data collected, we then perform supervised behavior cloning to train skill policies using egocentric vision, allowing humanoids to complete different tasks autonomously by imitating human skills. We demonstrate the system on our customized 33-DoF 180cm humanoid, autonomously completing tasks such as wearing a shoe to stand up and walk, unloading objects from warehouse racks, folding a sweatshirt, rearranging objects, typing, and greeting another robot with 60-100% success rates using up to 40 demonstrations. Project website: https://humanoid-ai.github.io/
Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation
Jan 04, 2024



Imitation learning from human demonstrations has shown impressive performance in robotics. However, most results focus on table-top manipulation, lacking the mobility and dexterity necessary for generally useful tasks. In this work, we develop a system for imitating mobile manipulation tasks that are bimanual and require whole-body control. We first present Mobile ALOHA, a low-cost and whole-body teleoperation system for data collection. It augments the ALOHA system with a mobile base, and a whole-body teleoperation interface. Using data collected with Mobile ALOHA, we then perform supervised behavior cloning and find that co-training with existing static ALOHA datasets boosts performance on mobile manipulation tasks. With 50 demonstrations for each task, co-training can increase success rates by up to 90%, allowing Mobile ALOHA to autonomously complete complex mobile manipulation tasks such as sauteing and serving a piece of shrimp, opening a two-door wall cabinet to store heavy cooking pots, calling and entering an elevator, and lightly rinsing a used pan using a kitchen faucet. Project website: https://mobile-aloha.github.io
Adapt On-the-Go: Behavior Modulation for Single-Life Robot Deployment
Nov 02, 2023



To succeed in the real world, robots must cope with situations that differ from those seen during training. We study the problem of adapting on-the-fly to such novel scenarios during deployment, by drawing upon a diverse repertoire of previously learned behaviors. Our approach, RObust Autonomous Modulation (ROAM), introduces a mechanism based on the perceived value of pre-trained behaviors to select and adapt pre-trained behaviors to the situation at hand. Crucially, this adaptation process all happens within a single episode at test time, without any human supervision. We provide theoretical analysis of our selection mechanism and demonstrate that ROAM enables a robot to adapt rapidly to changes in dynamics both in simulation and on a real Go1 quadruped, even successfully moving forward with roller skates on its feet. Our approach adapts over 2x as efficiently compared to existing methods when facing a variety of out-of-distribution situations during deployment by effectively choosing and adapting relevant behaviors on-the-fly.
Robot Parkour Learning
Sep 12, 2023



Parkour is a grand challenge for legged locomotion that requires robots to overcome various obstacles rapidly in complex environments. Existing methods can generate either diverse but blind locomotion skills or vision-based but specialized skills by using reference animal data or complex rewards. However, autonomous parkour requires robots to learn generalizable skills that are both vision-based and diverse to perceive and react to various scenarios. In this work, we propose a system for learning a single end-to-end vision-based parkour policy of diverse parkour skills using a simple reward without any reference motion data. We develop a reinforcement learning method inspired by direct collocation to generate parkour skills, including climbing over high obstacles, leaping over large gaps, crawling beneath low barriers, squeezing through thin slits, and running. We distill these skills into a single vision-based parkour policy and transfer it to a quadrupedal robot using its egocentric depth camera. We demonstrate that our system can empower two different low-cost robots to autonomously select and execute appropriate parkour skills to traverse challenging real-world environments.
Deep Whole-Body Control: Learning a Unified Policy for Manipulation and Locomotion
Oct 18, 2022
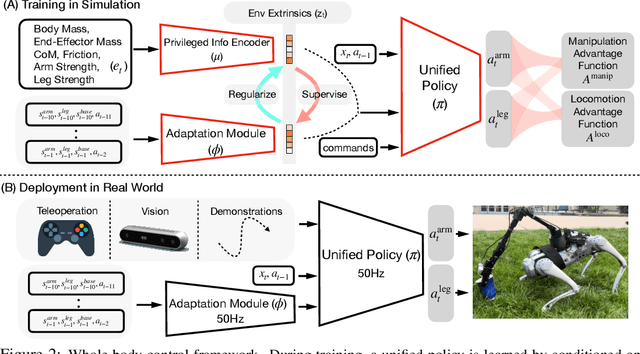
An attached arm can significantly increase the applicability of legged robots to several mobile manipulation tasks that are not possible for the wheeled or tracked counterparts. The standard hierarchical control pipeline for such legged manipulators is to decouple the controller into that of manipulation and locomotion. However, this is ineffective. It requires immense engineering to support coordination between the arm and legs, and error can propagate across modules causing non-smooth unnatural motions. It is also biological implausible given evidence for strong motor synergies across limbs. In this work, we propose to learn a unified policy for whole-body control of a legged manipulator using reinforcement learning. We propose Regularized Online Adaptation to bridge the Sim2Real gap for high-DoF control, and Advantage Mixing exploiting the causal dependency in the action space to overcome local minima during training the whole-body system. We also present a simple design for a low-cost legged manipulator, and find that our unified policy can demonstrate dynamic and agile behaviors across several task setups. Videos are at https://maniploco.github.io
Coupling Vision and Proprioception for Navigation of Legged Robots
Dec 03, 2021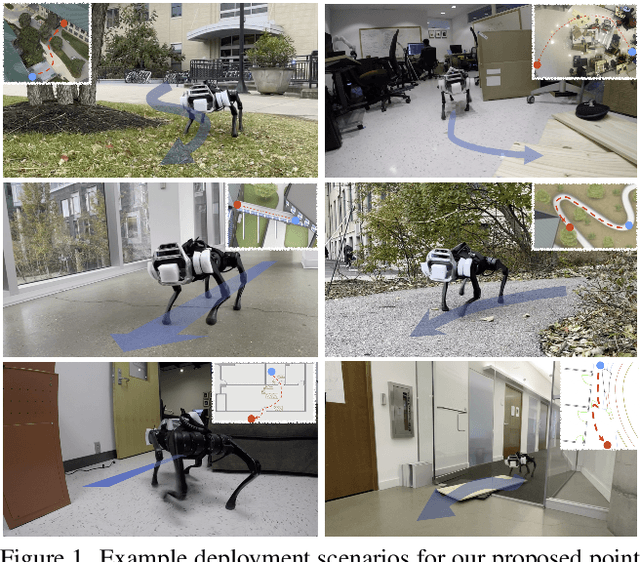
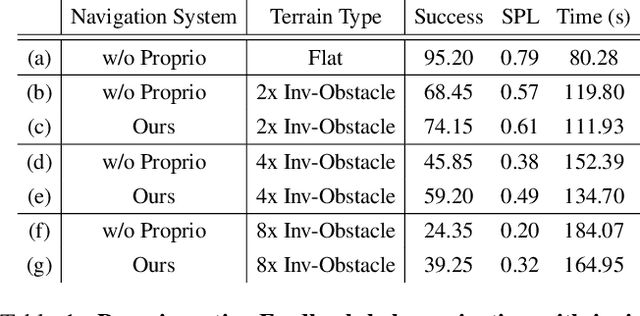
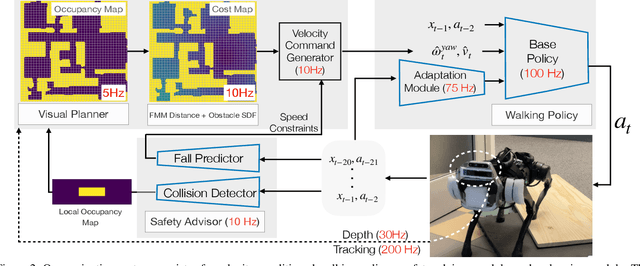
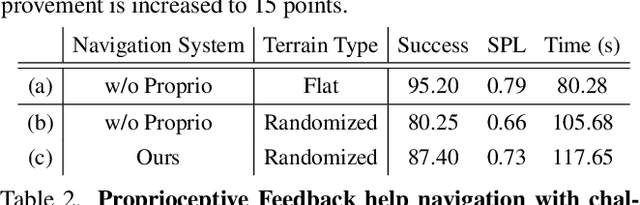
We exploit the complementary strengths of vision and proprioception to achieve point goal navigation in a legged robot. Legged systems are capable of traversing more complex terrain than wheeled robots, but to fully exploit this capability, we need the high-level path planner in the navigation system to be aware of the walking capabilities of the low-level locomotion policy on varying terrains. We achieve this by using proprioceptive feedback to estimate the safe operating limits of the walking policy, and to sense unexpected obstacles and terrain properties like smoothness or softness of the ground that may be missed by vision. The navigation system uses onboard cameras to generate an occupancy map and a corresponding cost map to reach the goal. The FMM (Fast Marching Method) planner then generates a target path. The velocity command generator takes this as input to generate the desired velocity for the locomotion policy using as input additional constraints, from the safety advisor, of unexpected obstacles and terrain determined speed limits. We show superior performance compared to wheeled robot (LoCoBot) baselines, and other baselines which have disjoint high-level planning and low-level control. We also show the real-world deployment of our system on a quadruped robot with onboard sensors and compute. Videos at https://navigation-locomotion.github.io/camera-ready
Minimizing Energy Consumption Leads to the Emergence of Gaits in Legged Robots
Oct 25, 2021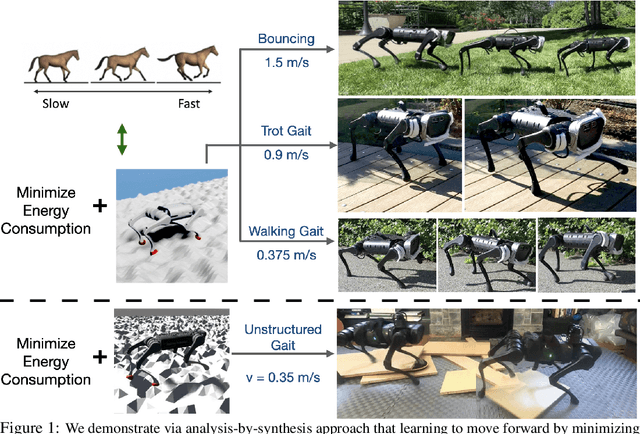
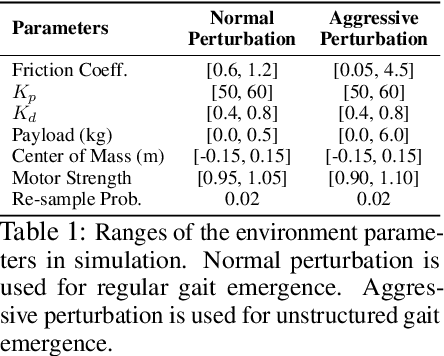
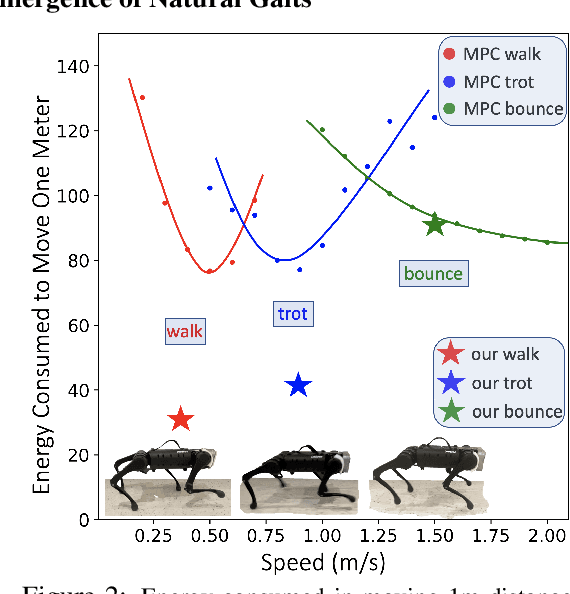
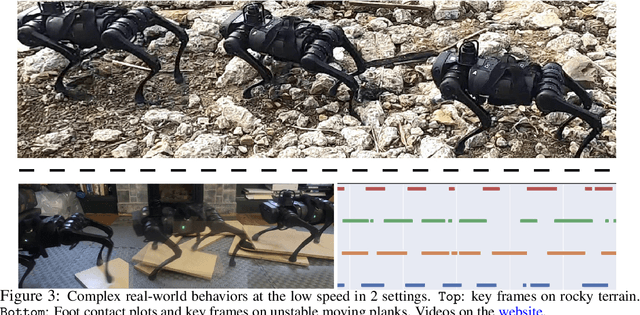
Legged locomotion is commonly studied and expressed as a discrete set of gait patterns, like walk, trot, gallop, which are usually treated as given and pre-programmed in legged robots for efficient locomotion at different speeds. However, fixing a set of pre-programmed gaits limits the generality of locomotion. Recent animal motor studies show that these conventional gaits are only prevalent in ideal flat terrain conditions while real-world locomotion is unstructured and more like bouts of intermittent steps. What principles could lead to both structured and unstructured patterns across mammals and how to synthesize them in robots? In this work, we take an analysis-by-synthesis approach and learn to move by minimizing mechanical energy. We demonstrate that learning to minimize energy consumption plays a key role in the emergence of natural locomotion gaits at different speeds in real quadruped robots. The emergent gaits are structured in ideal terrains and look similar to that of horses and sheep. The same approach leads to unstructured gaits in rough terrains which is consistent with the findings in animal motor control. We validate our hypothesis in both simulation and real hardware across natural terrains. Videos at https://energy-locomotion.github.io