 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnified Text-Image Generation with Weakness-Targeted Post-Training
Jan 07, 2026Unified multimodal generation architectures that jointly produce text and images have recently emerged as a promising direction for text-to-image (T2I) synthesis. However, many existing systems rely on explicit modality switching, generating reasoning text before switching manually to image generation. This separate, sequential inference process limits cross-modal coupling and prohibits automatic multimodal generation. This work explores post-training to achieve fully unified text-image generation, where models autonomously transition from textual reasoning to visual synthesis within a single inference process. We examine the impact of joint text-image generation on T2I performance and the relative importance of each modality during post-training. We additionally explore different post-training data strategies, showing that a targeted dataset addressing specific limitations achieves superior results compared to broad image-caption corpora or benchmark-aligned data. Using offline, reward-weighted post-training with fully self-generated synthetic data, our approach enables improvements in multimodal image generation across four diverse T2I benchmarks, demonstrating the effectiveness of reward-weighting both modalities and strategically designed post-training data.
Learnings from Scaling Visual Tokenizers for Reconstruction and Generation
Jan 16, 2025



Visual tokenization via auto-encoding empowers state-of-the-art image and video generative models by compressing pixels into a latent space. Although scaling Transformer-based generators has been central to recent advances, the tokenizer component itself is rarely scaled, leaving open questions about how auto-encoder design choices influence both its objective of reconstruction and downstream generative performance. Our work aims to conduct an exploration of scaling in auto-encoders to fill in this blank. To facilitate this exploration, we replace the typical convolutional backbone with an enhanced Vision Transformer architecture for Tokenization (ViTok). We train ViTok on large-scale image and video datasets far exceeding ImageNet-1K, removing data constraints on tokenizer scaling. We first study how scaling the auto-encoder bottleneck affects both reconstruction and generation -- and find that while it is highly correlated with reconstruction, its relationship with generation is more complex. We next explored the effect of separately scaling the auto-encoders' encoder and decoder on reconstruction and generation performance. Crucially, we find that scaling the encoder yields minimal gains for either reconstruction or generation, while scaling the decoder boosts reconstruction but the benefits for generation are mixed. Building on our exploration, we design ViTok as a lightweight auto-encoder that achieves competitive performance with state-of-the-art auto-encoders on ImageNet-1K and COCO reconstruction tasks (256p and 512p) while outperforming existing auto-encoders on 16-frame 128p video reconstruction for UCF-101, all with 2-5x fewer FLOPs. When integrated with Diffusion Transformers, ViTok demonstrates competitive performance on image generation for ImageNet-1K and sets new state-of-the-art benchmarks for class-conditional video generation on UCF-101.
Apollo: An Exploration of Video Understanding in Large Multimodal Models
Dec 13, 2024



Despite the rapid integration of video perception capabilities into Large Multimodal Models (LMMs), the underlying mechanisms driving their video understanding remain poorly understood. Consequently, many design decisions in this domain are made without proper justification or analysis. The high computational cost of training and evaluating such models, coupled with limited open research, hinders the development of video-LMMs. To address this, we present a comprehensive study that helps uncover what effectively drives video understanding in LMMs. We begin by critically examining the primary contributors to the high computational requirements associated with video-LMM research and discover Scaling Consistency, wherein design and training decisions made on smaller models and datasets (up to a critical size) effectively transfer to larger models. Leveraging these insights, we explored many video-specific aspects of video-LMMs, including video sampling, architectures, data composition, training schedules, and more. For example, we demonstrated that fps sampling during training is vastly preferable to uniform frame sampling and which vision encoders are the best for video representation. Guided by these findings, we introduce Apollo, a state-of-the-art family of LMMs that achieve superior performance across different model sizes. Our models can perceive hour-long videos efficiently, with Apollo-3B outperforming most existing $7$B models with an impressive 55.1 on LongVideoBench. Apollo-7B is state-of-the-art compared to 7B LMMs with a 70.9 on MLVU, and 63.3 on Video-MME.
D5RL: Diverse Datasets for Data-Driven Deep Reinforcement Learning
Aug 15, 2024



Offline reinforcement learning algorithms hold the promise of enabling data-driven RL methods that do not require costly or dangerous real-world exploration and benefit from large pre-collected datasets. This in turn can facilitate real-world applications, as well as a more standardized approach to RL research. Furthermore, offline RL methods can provide effective initializations for online finetuning to overcome challenges with exploration. However, evaluating progress on offline RL algorithms requires effective and challenging benchmarks that capture properties of real-world tasks, provide a range of task difficulties, and cover a range of challenges both in terms of the parameters of the domain (e.g., length of the horizon, sparsity of rewards) and the parameters of the data (e.g., narrow demonstration data or broad exploratory data). While considerable progress in offline RL in recent years has been enabled by simpler benchmark tasks, the most widely used datasets are increasingly saturating in performance and may fail to reflect properties of realistic tasks. We propose a new benchmark for offline RL that focuses on realistic simulations of robotic manipulation and locomotion environments, based on models of real-world robotic systems, and comprising a variety of data sources, including scripted data, play-style data collected by human teleoperators, and other data sources. Our proposed benchmark covers state-based and image-based domains, and supports both offline RL and online fine-tuning evaluation, with some of the tasks specifically designed to require both pre-training and fine-tuning. We hope that our proposed benchmark will facilitate further progress on both offline RL and fine-tuning algorithms. Website with code, examples, tasks, and data is available at \url{https://sites.google.com/view/d5rl/}
Unified Auto-Encoding with Masked Diffusion
Jun 25, 2024At the core of both successful generative and self-supervised representation learning models there is a reconstruction objective that incorporates some form of image corruption. Diffusion models implement this approach through a scheduled Gaussian corruption process, while masked auto-encoder models do so by masking patches of the image. Despite their different approaches, the underlying similarity in their methodologies suggests a promising avenue for an auto-encoder capable of both de-noising tasks. We propose a unified self-supervised objective, dubbed Unified Masked Diffusion (UMD), that combines patch-based and noise-based corruption techniques within a single auto-encoding framework. Specifically, UMD modifies the diffusion transformer (DiT) training process by introducing an additional noise-free, high masking representation step in the diffusion noising schedule, and utilizes a mixed masked and noised image for subsequent timesteps. By integrating features useful for diffusion modeling and for predicting masked patch tokens, UMD achieves strong performance in downstream generative and representation learning tasks, including linear probing and class-conditional generation. This is achieved without the need for heavy data augmentations, multiple views, or additional encoders. Furthermore, UMD improves over the computational efficiency of prior diffusion based methods in total training time. We release our code at https://github.com/philippe-eecs/small-vision.
BridgeData V2: A Dataset for Robot Learning at Scale
Aug 24, 2023We introduce BridgeData V2, a large and diverse dataset of robotic manipulation behaviors designed to facilitate research on scalable robot learning. BridgeData V2 contains 60,096 trajectories collected across 24 environments on a publicly available low-cost robot. BridgeData V2 provides extensive task and environment variability, leading to skills that can generalize across environments, domains, and institutions, making the dataset a useful resource for a broad range of researchers. Additionally, the dataset is compatible with a wide variety of open-vocabulary, multi-task learning methods conditioned on goal images or natural language instructions. In our experiments, we train 6 state-of-the-art imitation learning and offline reinforcement learning methods on our dataset, and find that they succeed on a suite of tasks requiring varying amounts of generalization. We also demonstrate that the performance of these methods improves with more data and higher capacity models, and that training on a greater variety of skills leads to improved generalization. By publicly sharing BridgeData V2 and our pre-trained models, we aim to accelerate research in scalable robot learning methods. Project page at https://rail-berkeley.github.io/bridgedata
Goal Representations for Instruction Following: A Semi-Supervised Language Interface to Control
Jun 30, 2023



Our goal is for robots to follow natural language instructions like "put the towel next to the microwave." But getting large amounts of labeled data, i.e. data that contains demonstrations of tasks labeled with the language instruction, is prohibitive. In contrast, obtaining policies that respond to image goals is much easier, because any autonomous trial or demonstration can be labeled in hindsight with its final state as the goal. In this work, we contribute a method that taps into joint image- and goal- conditioned policies with language using only a small amount of language data. Prior work has made progress on this using vision-language models or by jointly training language-goal-conditioned policies, but so far neither method has scaled effectively to real-world robot tasks without significant human annotation. Our method achieves robust performance in the real world by learning an embedding from the labeled data that aligns language not to the goal image, but rather to the desired change between the start and goal images that the instruction corresponds to. We then train a policy on this embedding: the policy benefits from all the unlabeled data, but the aligned embedding provides an interface for language to steer the policy. We show instruction following across a variety of manipulation tasks in different scenes, with generalization to language instructions outside of the labeled data. Videos and code for our approach can be found on our website: http://tiny.cc/grif .
IDQL: Implicit Q-Learning as an Actor-Critic Method with Diffusion Policies
Apr 20, 2023



Effective offline RL methods require properly handling out-of-distribution actions. Implicit Q-learning (IQL) addresses this by training a Q-function using only dataset actions through a modified Bellman backup. However, it is unclear which policy actually attains the values represented by this implicitly trained Q-function. In this paper, we reinterpret IQL as an actor-critic method by generalizing the critic objective and connecting it to a behavior-regularized implicit actor. This generalization shows how the induced actor balances reward maximization and divergence from the behavior policy, with the specific loss choice determining the nature of this tradeoff. Notably, this actor can exhibit complex and multimodal characteristics, suggesting issues with the conditional Gaussian actor fit with advantage weighted regression (AWR) used in prior methods. Instead, we propose using samples from a diffusion parameterized behavior policy and weights computed from the critic to then importance sampled our intended policy. We introduce Implicit Diffusion Q-learning (IDQL), combining our general IQL critic with the policy extraction method. IDQL maintains the ease of implementation of IQL while outperforming prior offline RL methods and demonstrating robustness to hyperparameters. Code is available at https://github.com/philippe-eecs/IDQL.
Bisimulation Makes Analogies in Goal-Conditioned Reinforcement Learning
Apr 28, 2022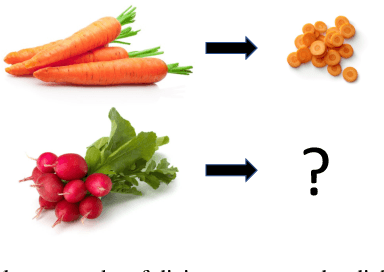
Building generalizable goal-conditioned agents from rich observations is a key to reinforcement learning (RL) solving real world problems. Traditionally in goal-conditioned RL, an agent is provided with the exact goal they intend to reach. However, it is often not realistic to know the configuration of the goal before performing a task. A more scalable framework would allow us to provide the agent with an example of an analogous task, and have the agent then infer what the goal should be for its current state. We propose a new form of state abstraction called goal-conditioned bisimulation that captures functional equivariance, allowing for the reuse of skills to achieve new goals. We learn this representation using a metric form of this abstraction, and show its ability to generalize to new goals in simulation manipulation tasks. Further, we prove that this learned representation is sufficient not only for goal conditioned tasks, but is amenable to any downstream task described by a state-only reward function. Videos can be found at https://sites.google.com/view/gc-bisimulation.
GEM: Group Enhanced Model for Learning Dynamical Control Systems
Apr 07, 2021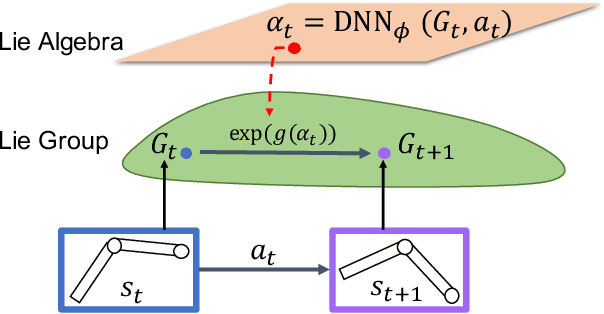
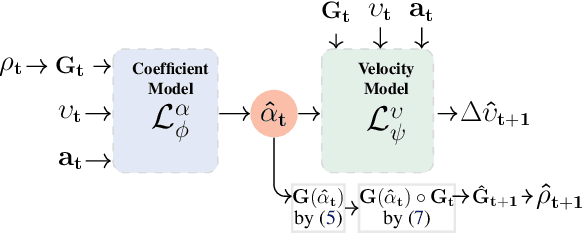
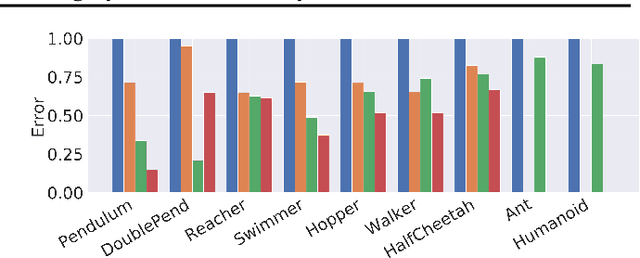
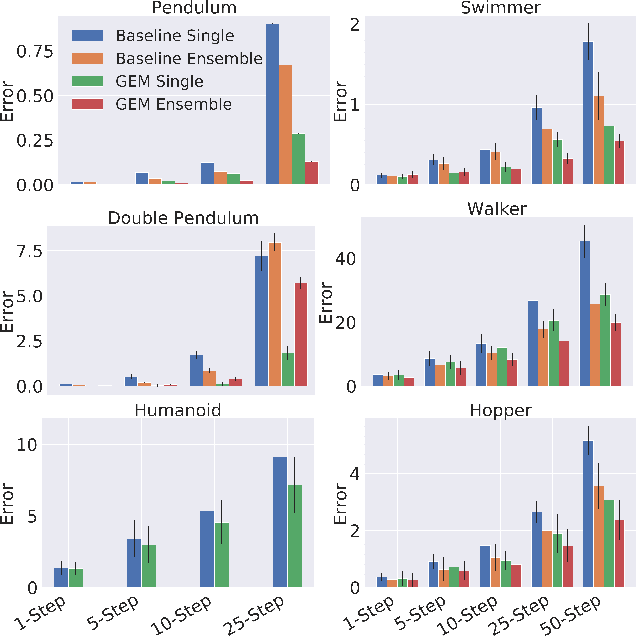
Learning the dynamics of a physical system wherein an autonomous agent operates is an important task. Often these systems present apparent geometric structures. For instance, the trajectories of a robotic manipulator can be broken down into a collection of its transitional and rotational motions, fully characterized by the corresponding Lie groups and Lie algebras. In this work, we take advantage of these structures to build effective dynamical models that are amenable to sample-based learning. We hypothesize that learning the dynamics on a Lie algebra vector space is more effective than learning a direct state transition model. To verify this hypothesis, we introduce the Group Enhanced Model (GEM). GEMs significantly outperform conventional transition models on tasks of long-term prediction, planning, and model-based reinforcement learning across a diverse suite of standard continuous-control environments, including Walker, Hopper, Reacher, Half-Cheetah, Inverted Pendulums, Ant, and Humanoid. Furthermore, plugging GEM into existing state of the art systems enhances their performance, which we demonstrate on the PETS system. This work sheds light on a connection between learning of dynamics and Lie group properties, which opens doors for new research directions and practical applications along this direction. Our code is publicly available at: https://tinyurl.com/GEMMBRL.