 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPT-4o System Card
Oct 25, 2024GPT-4o is an autoregressive omni model that accepts as input any combination of text, audio, image, and video, and generates any combination of text, audio, and image outputs. It's trained end-to-end across text, vision, and audio, meaning all inputs and outputs are processed by the same neural network. GPT-4o can respond to audio inputs in as little as 232 milliseconds, with an average of 320 milliseconds, which is similar to human response time in conversation. It matches GPT-4 Turbo performance on text in English and code, with significant improvement on text in non-English languages, while also being much faster and 50\% cheaper in the API. GPT-4o is especially better at vision and audio understanding compared to existing models. In line with our commitment to building AI safely and consistent with our voluntary commitments to the White House, we are sharing the GPT-4o System Card, which includes our Preparedness Framework evaluations. In this System Card, we provide a detailed look at GPT-4o's capabilities, limitations, and safety evaluations across multiple categories, focusing on speech-to-speech while also evaluating text and image capabilities, and measures we've implemented to ensure the model is safe and aligned. We also include third-party assessments on dangerous capabilities, as well as discussion of potential societal impacts of GPT-4o's text and vision capabilities.
H-GAP: Humanoid Control with a Generalist Planner
Dec 05, 2023



Humanoid control is an important research challenge offering avenues for integration into human-centric infrastructures and enabling physics-driven humanoid animations. The daunting challenges in this field stem from the difficulty of optimizing in high-dimensional action spaces and the instability introduced by the bipedal morphology of humanoids. However, the extensive collection of human motion-captured data and the derived datasets of humanoid trajectories, such as MoCapAct, paves the way to tackle these challenges. In this context, we present Humanoid Generalist Autoencoding Planner (H-GAP), a state-action trajectory generative model trained on humanoid trajectories derived from human motion-captured data, capable of adeptly handling downstream control tasks with Model Predictive Control (MPC). For 56 degrees of freedom humanoid, we empirically demonstrate that H-GAP learns to represent and generate a wide range of motor behaviours. Further, without any learning from online interactions, it can also flexibly transfer these behaviors to solve novel downstream control tasks via planning. Notably, H-GAP excels established MPC baselines that have access to the ground truth dynamics model, and is superior or comparable to offline RL methods trained for individual tasks. Finally, we do a series of empirical studies on the scaling properties of H-GAP, showing the potential for performance gains via additional data but not computing. Code and videos are available at https://ycxuyingchen.github.io/hgap/.
Deep Generative Models for Decision-Making and Control
Jun 15, 2023



Deep model-based reinforcement learning methods offer a conceptually simple approach to the decision-making and control problem: use learning for the purpose of estimating an approximate dynamics model, and offload the rest of the work to classical trajectory optimization. However, this combination has a number of empirical shortcomings, limiting the usefulness of model-based methods in practice. The dual purpose of this thesis is to study the reasons for these shortcomings and to propose solutions for the uncovered problems. Along the way, we highlight how inference techniques from the contemporary generative modeling toolbox, including beam search, classifier-guided sampling, and image inpainting, can be reinterpreted as viable planning strategies for reinforcement learning problems.
Training Diffusion Models with Reinforcement Learning
May 23, 2023



Diffusion models are a class of flexible generative models trained with an approximation to the log-likelihood objective. However, most use cases of diffusion models are not concerned with likelihoods, but instead with downstream objectives such as human-perceived image quality or drug effectiveness. In this paper, we investigate reinforcement learning methods for directly optimizing diffusion models for such objectives. We describe how posing denoising as a multi-step decision-making problem enables a class of policy gradient algorithms, which we refer to as denoising diffusion policy optimization (DDPO), that are more effective than alternative reward-weighted likelihood approaches. Empirically, DDPO is able to adapt text-to-image diffusion models to objectives that are difficult to express via prompting, such as image compressibility, and those derived from human feedback, such as aesthetic quality. Finally, we show that DDPO can improve prompt-image alignment using feedback from a vision-language model without the need for additional data collection or human annotation.
IDQL: Implicit Q-Learning as an Actor-Critic Method with Diffusion Policies
Apr 20, 2023



Effective offline RL methods require properly handling out-of-distribution actions. Implicit Q-learning (IQL) addresses this by training a Q-function using only dataset actions through a modified Bellman backup. However, it is unclear which policy actually attains the values represented by this implicitly trained Q-function. In this paper, we reinterpret IQL as an actor-critic method by generalizing the critic objective and connecting it to a behavior-regularized implicit actor. This generalization shows how the induced actor balances reward maximization and divergence from the behavior policy, with the specific loss choice determining the nature of this tradeoff. Notably, this actor can exhibit complex and multimodal characteristics, suggesting issues with the conditional Gaussian actor fit with advantage weighted regression (AWR) used in prior methods. Instead, we propose using samples from a diffusion parameterized behavior policy and weights computed from the critic to then importance sampled our intended policy. We introduce Implicit Diffusion Q-learning (IDQL), combining our general IQL critic with the policy extraction method. IDQL maintains the ease of implementation of IQL while outperforming prior offline RL methods and demonstrating robustness to hyperparameters. Code is available at https://github.com/philippe-eecs/IDQL.
Efficient Planning in a Compact Latent Action Space
Aug 25, 2022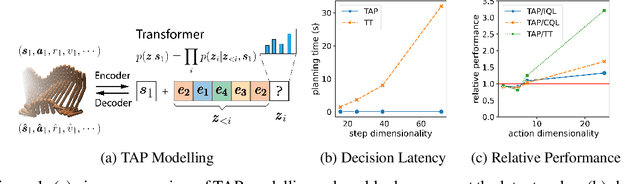
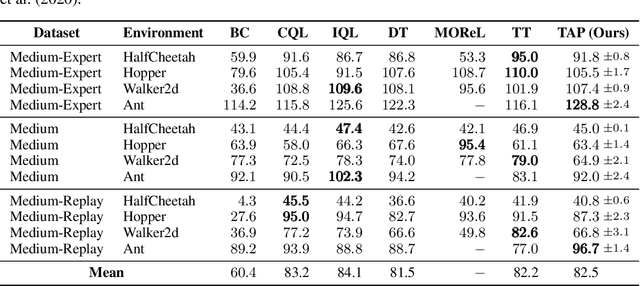
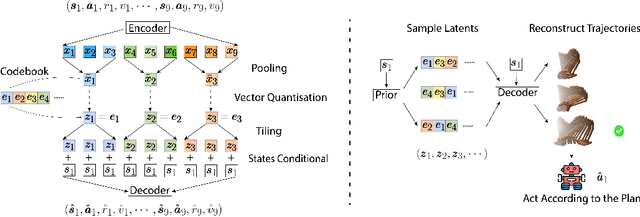
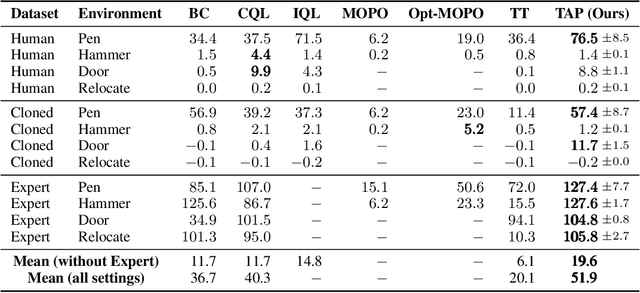
While planning-based sequence modelling methods have shown great potential in continuous control, scaling them to high-dimensional state-action sequences remains an open challenge due to the high computational complexity and innate difficulty of planning in high-dimensional spaces. We propose the Trajectory Autoencoding Planner (TAP), a planning-based sequence modelling RL method that scales to high state-action dimensionalities. Using a state-conditional Vector-Quantized Variational Autoencoder (VQ-VAE), TAP models the conditional distribution of the trajectories given the current state. When deployed as an RL agent, TAP avoids planning step-by-step in a high-dimensional continuous action space but instead looks for the optimal latent code sequences by beam search. Unlike $O(D^3)$ complexity of Trajectory Transformer, TAP enjoys constant $O(C)$ planning computational complexity regarding state-action dimensionality $D$. Our empirical evaluation also shows the increasingly strong performance of TAP with the growing dimensionality. For Adroit robotic hand manipulation tasks with high state and action dimensionality, TAP surpasses existing model-based methods, including TT, with a large margin and also beats strong model-free actor-critic baselines.
Lyapunov Density Models: Constraining Distribution Shift in Learning-Based Control
Jun 21, 2022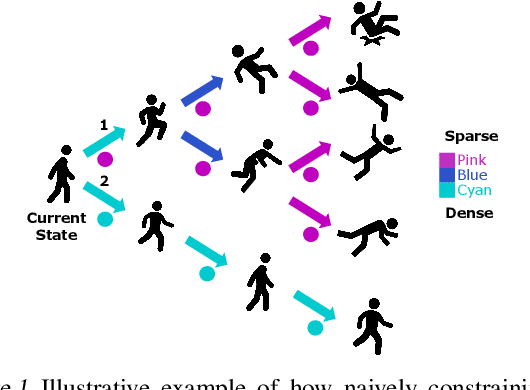
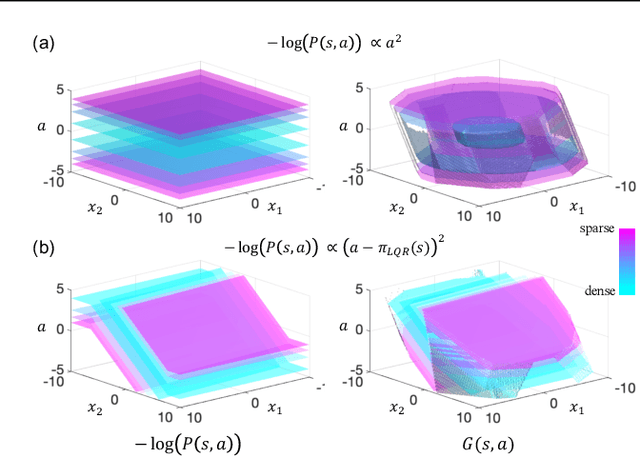
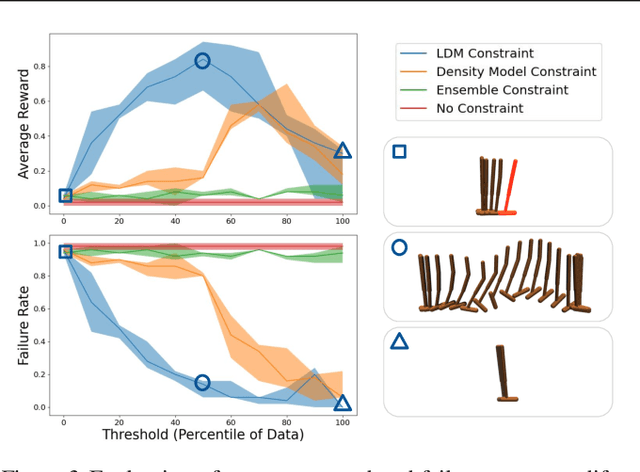
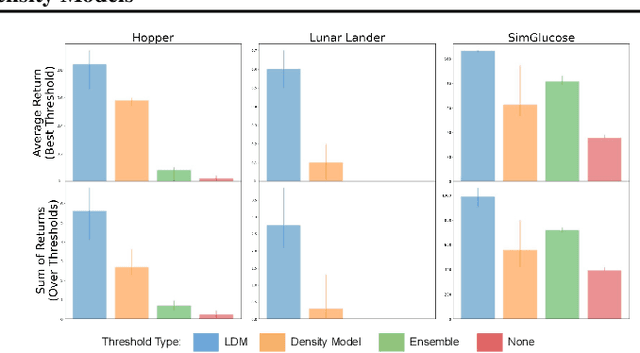
Learned models and policies can generalize effectively when evaluated within the distribution of the training data, but can produce unpredictable and erroneous outputs on out-of-distribution inputs. In order to avoid distribution shift when deploying learning-based control algorithms, we seek a mechanism to constrain the agent to states and actions that resemble those that it was trained on. In control theory, Lyapunov stability and control-invariant sets allow us to make guarantees about controllers that stabilize the system around specific states, while in machine learning, density models allow us to estimate the training data distribution. Can we combine these two concepts, producing learning-based control algorithms that constrain the system to in-distribution states using only in-distribution actions? In this work, we propose to do this by combining concepts from Lyapunov stability and density estimation, introducing Lyapunov density models: a generalization of control Lyapunov functions and density models that provides guarantees on an agent's ability to stay in-distribution over its entire trajectory.
Planning with Diffusion for Flexible Behavior Synthesis
May 20, 2022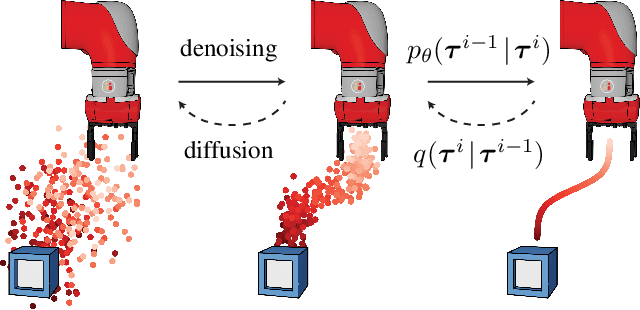
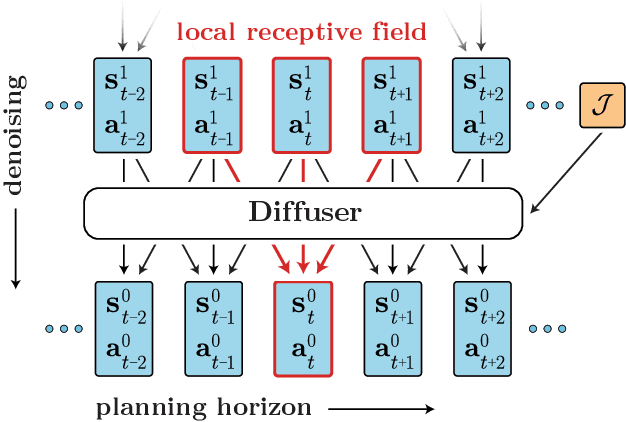
Model-based reinforcement learning methods often use learning only for the purpose of estimating an approximate dynamics model, offloading the rest of the decision-making work to classical trajectory optimizers. While conceptually simple, this combination has a number of empirical shortcomings, suggesting that learned models may not be well-suited to standard trajectory optimization. In this paper, we consider what it would look like to fold as much of the trajectory optimization pipeline as possible into the modeling problem, such that sampling from the model and planning with it become nearly identical. The core of our technical approach lies in a diffusion probabilistic model that plans by iteratively denoising trajectories. We show how classifier-guided sampling and image inpainting can be reinterpreted as coherent planning strategies, explore the unusual and useful properties of diffusion-based planning methods, and demonstrate the effectiveness of our framework in control settings that emphasize long-horizon decision-making and test-time flexibility.
Reinforcement Learning as One Big Sequence Modeling Problem
Jun 03, 2021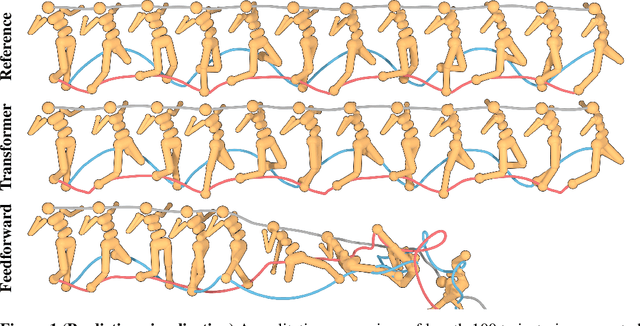
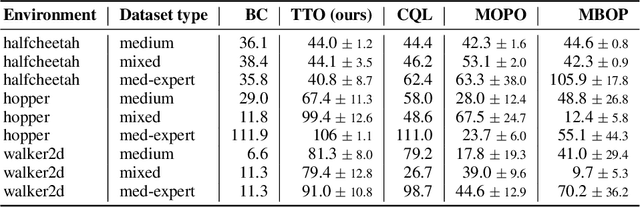
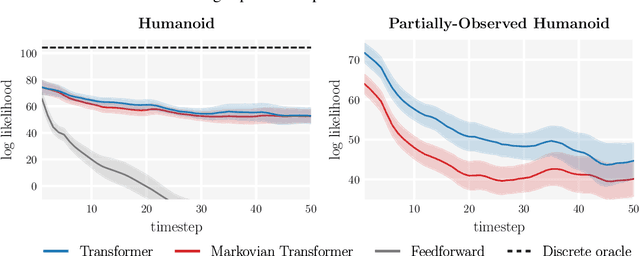
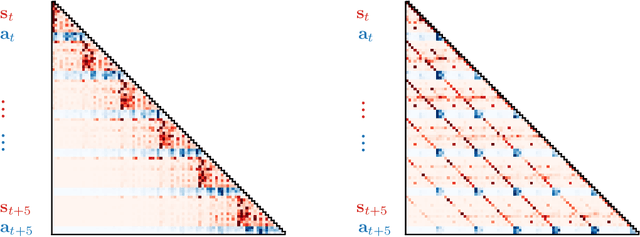
Reinforcement learning (RL) is typically concerned with estimating single-step policies or single-step models, leveraging the Markov property to factorize the problem in time. However, we can also view RL as a sequence modeling problem, with the goal being to predict a sequence of actions that leads to a sequence of high rewards. Viewed in this way, it is tempting to consider whether powerful, high-capacity sequence prediction models that work well in other domains, such as natural-language processing, can also provide simple and effective solutions to the RL problem. To this end, we explore how RL can be reframed as "one big sequence modeling" problem, using state-of-the-art Transformer architectures to model distributions over sequences of states, actions, and rewards. Addressing RL as a sequence modeling problem significantly simplifies a range of design decisions: we no longer require separate behavior policy constraints, as is common in prior work on offline model-free RL, and we no longer require ensembles or other epistemic uncertainty estimators, as is common in prior work on model-based RL. All of these roles are filled by the same Transformer sequence model. In our experiments, we demonstrate the flexibility of this approach across long-horizon dynamics prediction, imitation learning, goal-conditioned RL, and offline RL.
$γ$-Models: Generative Temporal Difference Learning for Infinite-Horizon Prediction
Oct 27, 2020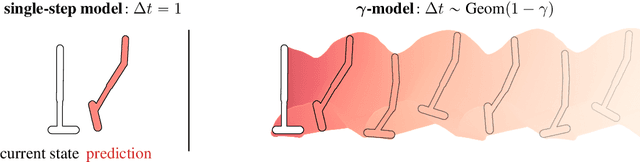
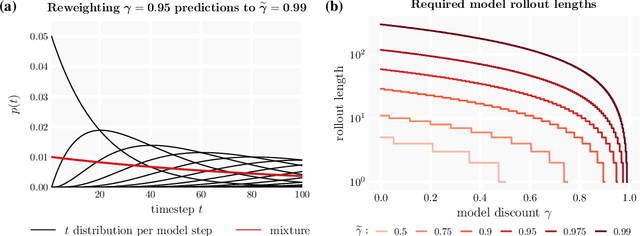
We introduce the $\gamma$-model, a predictive model of environment dynamics with an infinite probabilistic horizon. Replacing standard single-step models with $\gamma$-models leads to generalizations of the procedures that form the foundation of model-based control, including the model rollout and model-based value estimation. The $\gamma$-model, trained with a generative reinterpretation of temporal difference learning, is a natural continuous analogue of the successor representation and a hybrid between model-free and model-based mechanisms. Like a value function, it contains information about the long-term future; like a standard predictive model, it is independent of task reward. We instantiate the $\gamma$-model as both a generative adversarial network and normalizing flow, discuss how its training reflects an inescapable tradeoff between training-time and testing-time compounding errors, and empirically investigate its utility for prediction and control.