 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSinDiffusion: Learning a Diffusion Model from a Single Natural Image
Nov 22, 2022We present SinDiffusion, leveraging denoising diffusion models to capture internal distribution of patches from a single natural image. SinDiffusion significantly improves the quality and diversity of generated samples compared with existing GAN-based approaches. It is based on two core designs. First, SinDiffusion is trained with a single model at a single scale instead of multiple models with progressive growing of scales which serves as the default setting in prior work. This avoids the accumulation of errors, which cause characteristic artifacts in generated results. Second, we identify that a patch-level receptive field of the diffusion network is crucial and effective for capturing the image's patch statistics, therefore we redesign the network structure of the diffusion model. Coupling these two designs enables us to generate photorealistic and diverse images from a single image. Furthermore, SinDiffusion can be applied to various applications, i.e., text-guided image generation, and image outpainting, due to the inherent capability of diffusion models. Extensive experiments on a wide range of images demonstrate the superiority of our proposed method for modeling the patch distribution.
OmniVL:One Foundation Model for Image-Language and Video-Language Tasks
Sep 15, 2022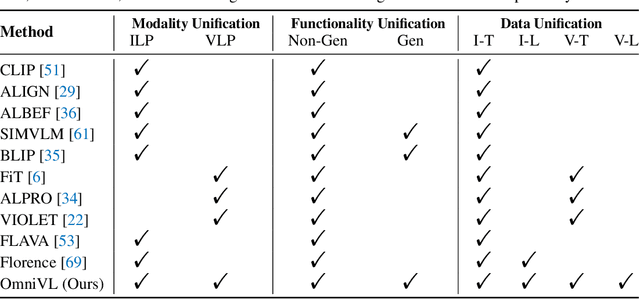
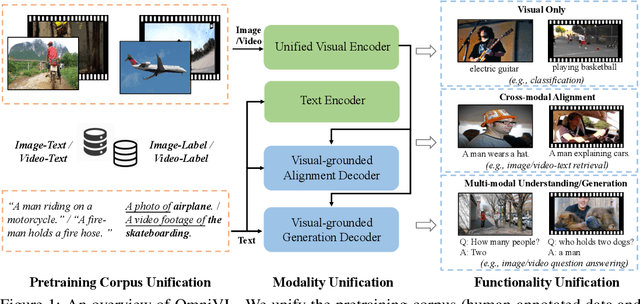
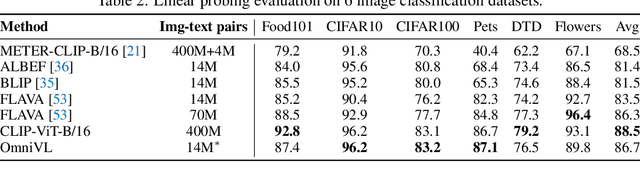
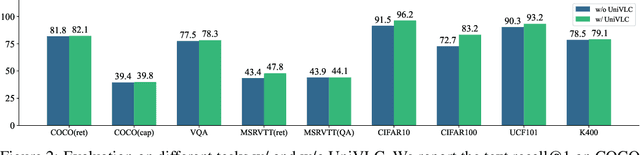
This paper presents OmniVL, a new foundation model to support both image-language and video-language tasks using one universal architecture. It adopts a unified transformer-based visual encoder for both image and video inputs, and thus can perform joint image-language and video-language pretraining. We demonstrate, for the first time, such a paradigm benefits both image and video tasks, as opposed to the conventional one-directional transfer (e.g., use image-language to help video-language). To this end, we propose a decoupled joint pretraining of image-language and video-language to effectively decompose the vision-language modeling into spatial and temporal dimensions and obtain performance boost on both image and video tasks. Moreover, we introduce a novel unified vision-language contrastive (UniVLC) loss to leverage image-text, video-text, image-label (e.g., image classification), video-label (e.g., video action recognition) data together, so that both supervised and noisily supervised pretraining data are utilized as much as possible. Without incurring extra task-specific adaptors, OmniVL can simultaneously support visual only tasks (e.g., image classification, video action recognition), cross-modal alignment tasks (e.g., image/video-text retrieval), and multi-modal understanding and generation tasks (e.g., image/video question answering, captioning). We evaluate OmniVL on a wide range of downstream tasks and achieve state-of-the-art or competitive results with similar model size and data scale.
Frido: Feature Pyramid Diffusion for Complex Scene Image Synthesis
Aug 29, 2022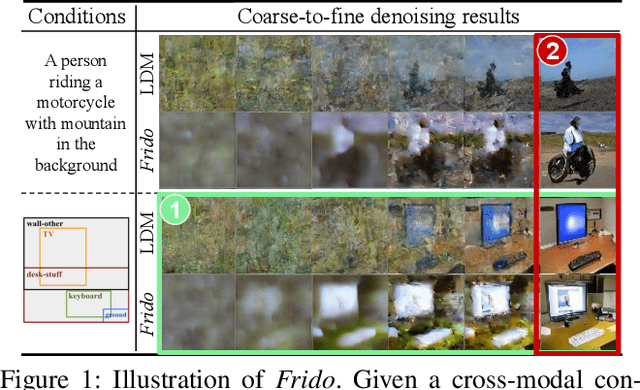
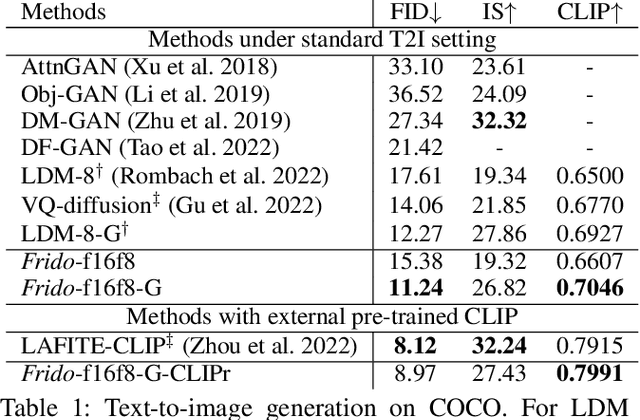
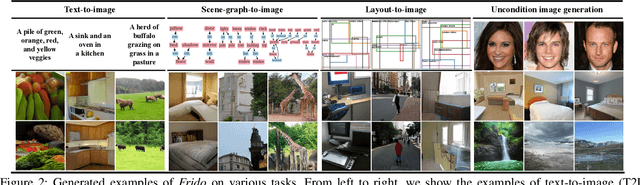
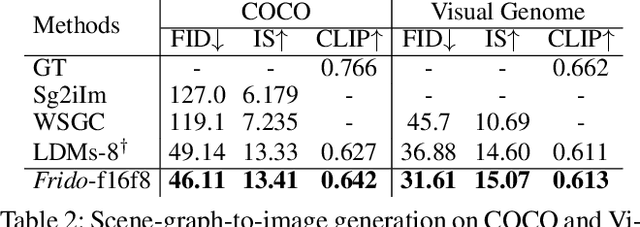
Diffusion models (DMs) have shown great potential for high-quality image synthesis. However, when it comes to producing images with complex scenes, how to properly describe both image global structures and object details remains a challenging task. In this paper, we present Frido, a Feature Pyramid Diffusion model performing a multi-scale coarse-to-fine denoising process for image synthesis. Our model decomposes an input image into scale-dependent vector quantized features, followed by a coarse-to-fine gating for producing image output. During the above multi-scale representation learning stage, additional input conditions like text, scene graph, or image layout can be further exploited. Thus, Frido can be also applied for conditional or cross-modality image synthesis. We conduct extensive experiments over various unconditioned and conditional image generation tasks, ranging from text-to-image synthesis, layout-to-image, scene-graph-to-image, to label-to-image. More specifically, we achieved state-of-the-art FID scores on five benchmarks, namely layout-to-image on COCO and OpenImages, scene-graph-to-image on COCO and Visual Genome, and label-to-image on COCO. Code is available at https://github.com/davidhalladay/Frido.
MaskCLIP: Masked Self-Distillation Advances Contrastive Language-Image Pretraining
Aug 25, 2022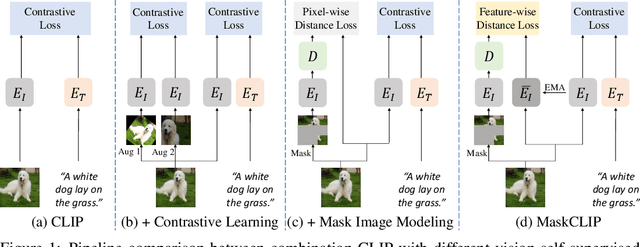
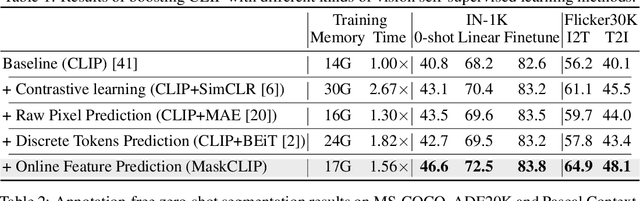
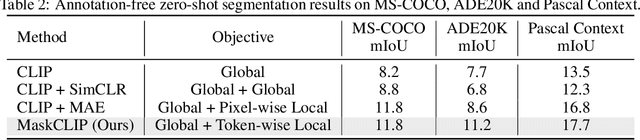
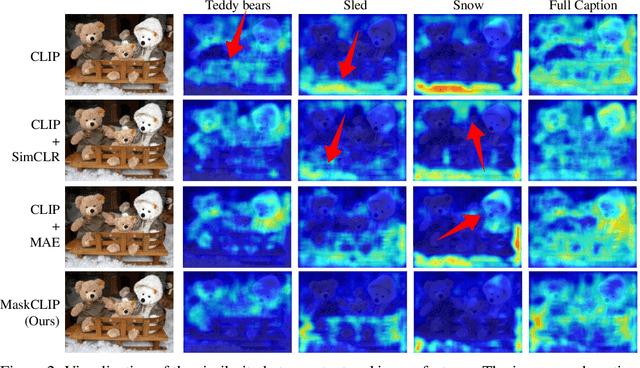
This paper presents a simple yet effective framework MaskCLIP, which incorporates a newly proposed masked self-distillation into contrastive language-image pretraining. The core idea of masked self-distillation is to distill representation from a full image to the representation predicted from a masked image. Such incorporation enjoys two vital benefits. First, masked self-distillation targets local patch representation learning, which is complementary to vision-language contrastive focusing on text-related representation.Second, masked self-distillation is also consistent with vision-language contrastive from the perspective of training objective as both utilize the visual encoder for feature aligning, and thus is able to learn local semantics getting indirect supervision from the language. We provide specially designed experiments with a comprehensive analysis to validate the two benefits. Empirically, we show that MaskCLIP, when applied to various challenging downstream tasks, achieves superior results in linear probing, finetuning as well as the zero-shot performance with the guidance of the language encoder.
Video Mobile-Former: Video Recognition with Efficient Global Spatial-temporal Modeling
Aug 25, 2022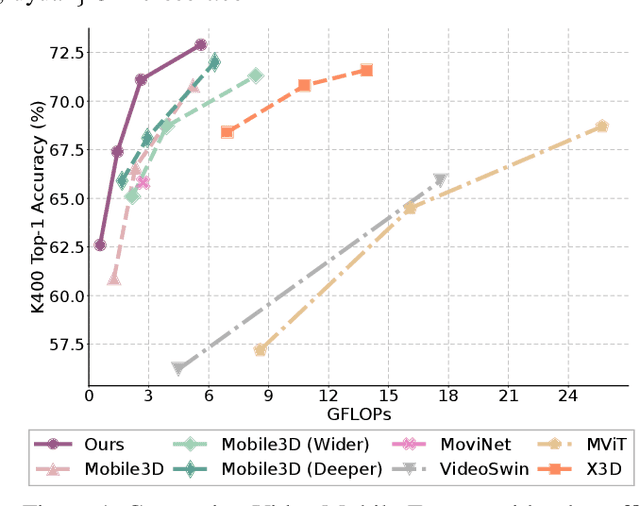
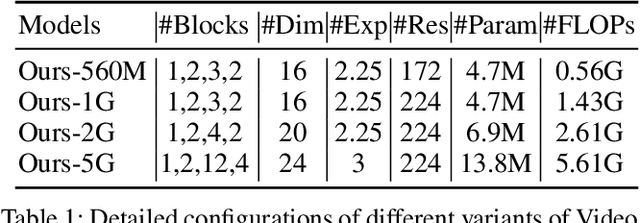
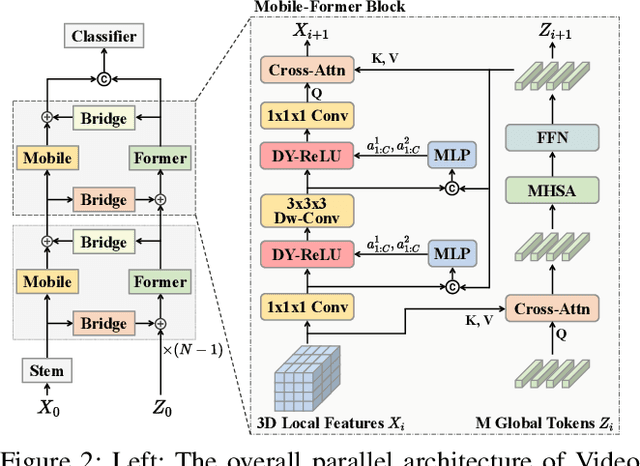
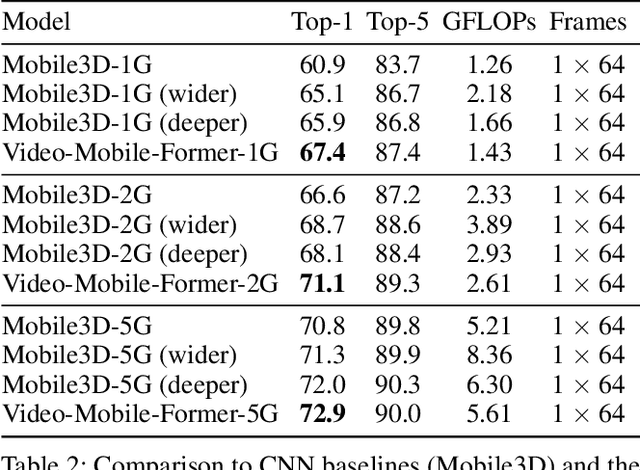
Transformer-based models have achieved top performance on major video recognition benchmarks. Benefiting from the self-attention mechanism, these models show stronger ability of modeling long-range dependencies compared to CNN-based models. However, significant computation overheads, resulted from the quadratic complexity of self-attention on top of a tremendous number of tokens, limit the use of existing video transformers in applications with limited resources like mobile devices. In this paper, we extend Mobile-Former to Video Mobile-Former, which decouples the video architecture into a lightweight 3D-CNNs for local context modeling and a Transformer modules for global interaction modeling in a parallel fashion. To avoid significant computational cost incurred by computing self-attention between the large number of local patches in videos, we propose to use very few global tokens (e.g., 6) for a whole video in Transformers to exchange information with 3D-CNNs with a cross-attention mechanism. Through efficient global spatial-temporal modeling, Video Mobile-Former significantly improves the video recognition performance of alternative lightweight baselines, and outperforms other efficient CNN-based models at the low FLOP regime from 500M to 6G total FLOPs on various video recognition tasks. It is worth noting that Video Mobile-Former is the first Transformer-based video model which constrains the computational budget within 1G FLOPs.
Learning Visual Representation from Modality-Shared Contrastive Language-Image Pre-training
Jul 26, 2022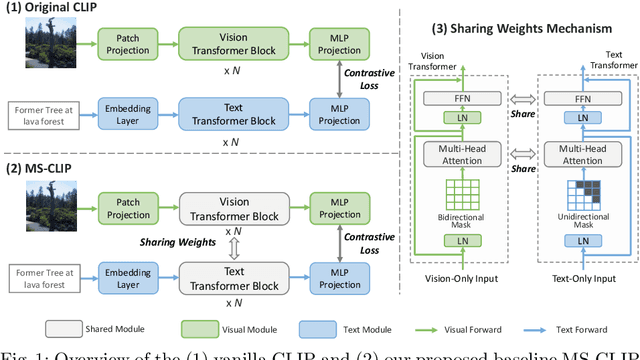
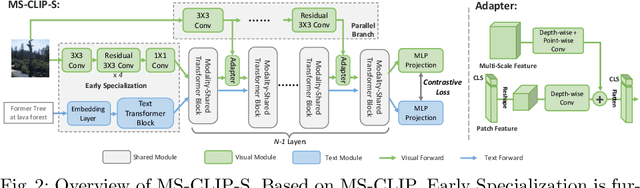
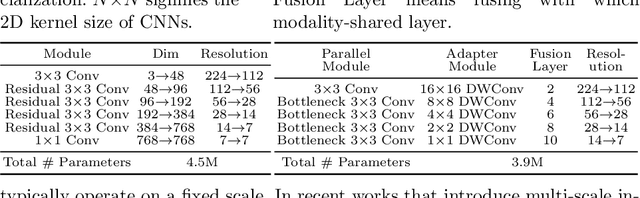
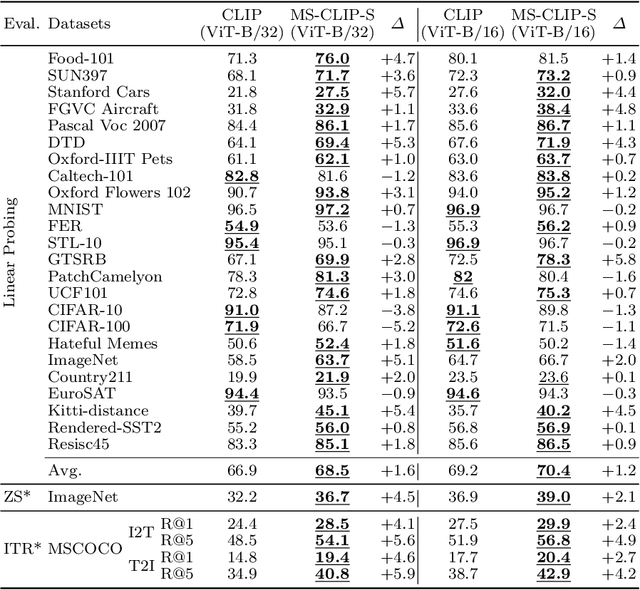
Large-scale multi-modal contrastive pre-training has demonstrated great utility to learn transferable features for a range of downstream tasks by mapping multiple modalities into a shared embedding space. Typically, this has employed separate encoders for each modality. However, recent work suggests that transformers can support learning across multiple modalities and allow knowledge sharing. Inspired by this, we investigate a variety of Modality-Shared Contrastive Language-Image Pre-training (MS-CLIP) frameworks. More specifically, we question how many parameters of a transformer model can be shared across modalities during contrastive pre-training, and rigorously examine architectural design choices that position the proportion of parameters shared along a spectrum. In studied conditions, we observe that a mostly unified encoder for vision and language signals outperforms all other variations that separate more parameters. Additionally, we find that light-weight modality-specific parallel modules further improve performance. Experimental results show that the proposed MS-CLIP approach outperforms vanilla CLIP by up to 13\% relative in zero-shot ImageNet classification (pre-trained on YFCC-100M), while simultaneously supporting a reduction of parameters. In addition, our approach outperforms vanilla CLIP by 1.6 points in linear probing on a collection of 24 downstream vision tasks. Furthermore, we discover that sharing parameters leads to semantic concepts from different modalities being encoded more closely in the embedding space, facilitating the transferring of common semantic structure (e.g., attention patterns) from language to vision. Code is available at \href{https://github.com/Hxyou/MSCLIP}{URL}.
TinyViT: Fast Pretraining Distillation for Small Vision Transformers
Jul 21, 2022



Vision transformer (ViT) recently has drawn great attention in computer vision due to its remarkable model capability. However, most prevailing ViT models suffer from huge number of parameters, restricting their applicability on devices with limited resources. To alleviate this issue, we propose TinyViT, a new family of tiny and efficient small vision transformers pretrained on large-scale datasets with our proposed fast distillation framework. The central idea is to transfer knowledge from large pretrained models to small ones, while enabling small models to get the dividends of massive pretraining data. More specifically, we apply distillation during pretraining for knowledge transfer. The logits of large teacher models are sparsified and stored in disk in advance to save the memory cost and computation overheads. The tiny student transformers are automatically scaled down from a large pretrained model with computation and parameter constraints. Comprehensive experiments demonstrate the efficacy of TinyViT. It achieves a top-1 accuracy of 84.8% on ImageNet-1k with only 21M parameters, being comparable to Swin-B pretrained on ImageNet-21k while using 4.2 times fewer parameters. Moreover, increasing image resolutions, TinyViT can reach 86.5% accuracy, being slightly better than Swin-L while using only 11% parameters. Last but not the least, we demonstrate a good transfer ability of TinyViT on various downstream tasks. Code and models are available at https://github.com/microsoft/Cream/tree/main/TinyViT.
Bootstrapped Masked Autoencoders for Vision BERT Pretraining
Jul 14, 2022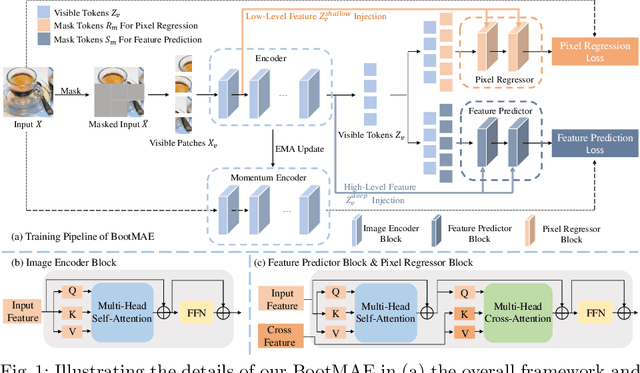


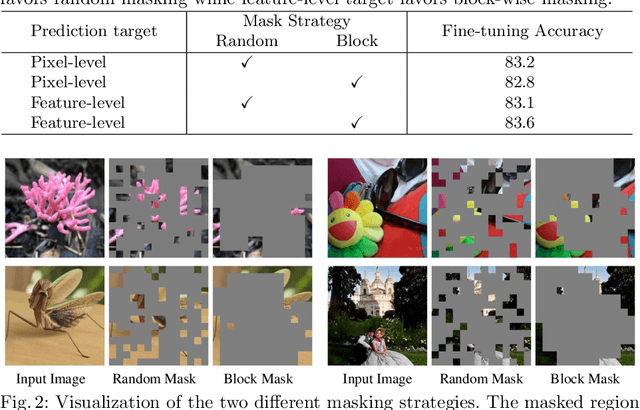
We propose bootstrapped masked autoencoders (BootMAE), a new approach for vision BERT pretraining. BootMAE improves the original masked autoencoders (MAE) with two core designs: 1) momentum encoder that provides online feature as extra BERT prediction targets; 2) target-aware decoder that tries to reduce the pressure on the encoder to memorize target-specific information in BERT pretraining. The first design is motivated by the observation that using a pretrained MAE to extract the features as the BERT prediction target for masked tokens can achieve better pretraining performance. Therefore, we add a momentum encoder in parallel with the original MAE encoder, which bootstraps the pretraining performance by using its own representation as the BERT prediction target. In the second design, we introduce target-specific information (e.g., pixel values of unmasked patches) from the encoder directly to the decoder to reduce the pressure on the encoder of memorizing the target-specific information. Thus, the encoder focuses on semantic modeling, which is the goal of BERT pretraining, and does not need to waste its capacity in memorizing the information of unmasked tokens related to the prediction target. Through extensive experiments, our BootMAE achieves $84.2\%$ Top-1 accuracy on ImageNet-1K with ViT-B backbone, outperforming MAE by $+0.8\%$ under the same pre-training epochs. BootMAE also gets $+1.0$ mIoU improvements on semantic segmentation on ADE20K and $+1.3$ box AP, $+1.4$ mask AP improvement on object detection and segmentation on COCO dataset. Code is released at https://github.com/LightDXY/BootMAE.
Should All Proposals be Treated Equally in Object Detection?
Jul 07, 2022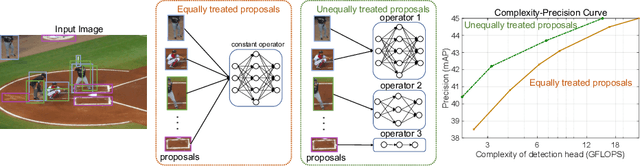
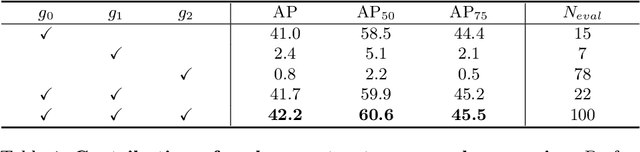
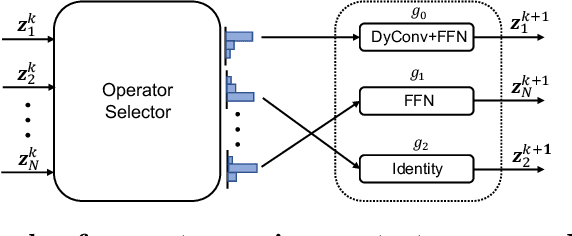
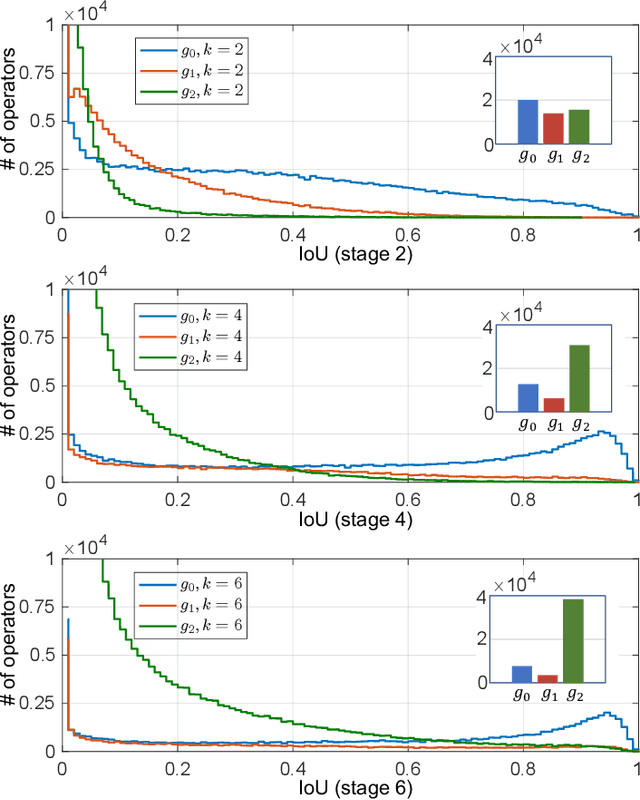
The complexity-precision trade-off of an object detector is a critical problem for resource constrained vision tasks. Previous works have emphasized detectors implemented with efficient backbones. The impact on this trade-off of proposal processing by the detection head is investigated in this work. It is hypothesized that improved detection efficiency requires a paradigm shift, towards the unequal processing of proposals, assigning more computation to good proposals than poor ones. This results in better utilization of available computational budget, enabling higher accuracy for the same FLOPS. We formulate this as a learning problem where the goal is to assign operators to proposals, in the detection head, so that the total computational cost is constrained and the precision is maximized. The key finding is that such matching can be learned as a function that maps each proposal embedding into a one-hot code over operators. While this function induces a complex dynamic network routing mechanism, it can be implemented by a simple MLP and learned end-to-end with off-the-shelf object detectors. This 'dynamic proposal processing' (DPP) is shown to outperform state-of-the-art end-to-end object detectors (DETR, Sparse R-CNN) by a clear margin for a given computational complexity.
Semantic Image Synthesis via Diffusion Models
Jun 30, 2022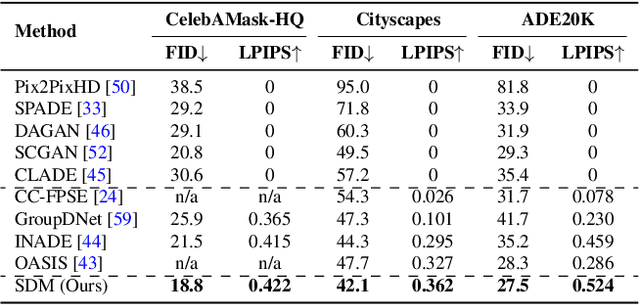
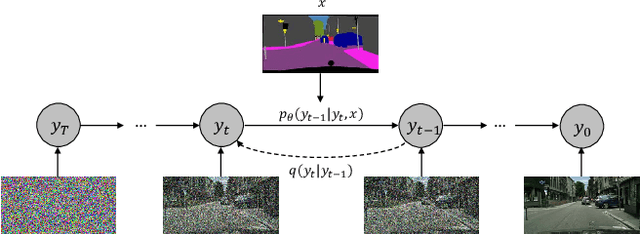
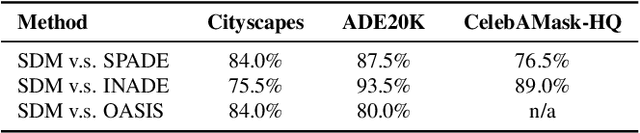
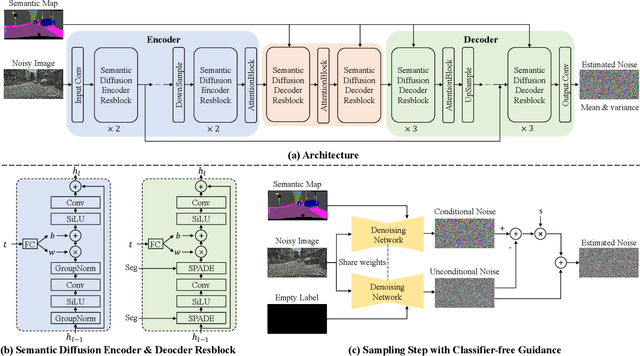
Denoising Diffusion Probabilistic Models (DDPMs) have achieved remarkable success in various image generation tasks compared with Generative Adversarial Nets (GANs). Recent work on semantic image synthesis mainly follows the \emph{de facto} GAN-based approaches, which may lead to unsatisfactory quality or diversity of generated images. In this paper, we propose a novel framework based on DDPM for semantic image synthesis. Unlike previous conditional diffusion model directly feeds the semantic layout and noisy image as input to a U-Net structure, which may not fully leverage the information in the input semantic mask, our framework processes semantic layout and noisy image differently. It feeds noisy image to the encoder of the U-Net structure while the semantic layout to the decoder by multi-layer spatially-adaptive normalization operators. To further improve the generation quality and semantic interpretability in semantic image synthesis, we introduce the classifier-free guidance sampling strategy, which acknowledge the scores of an unconditional model for sampling process. Extensive experiments on three benchmark datasets demonstrate the effectiveness of our proposed method, achieving state-of-the-art performance in terms of fidelity~(FID) and diversity~(LPIPS).