 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLibra-VLA: Achieving Learning Equilibrium via Asynchronous Coarse-to-Fine Dual-System
Apr 27, 2026Vision-Language-Action (VLA) models are a promising paradigm for generalist robotic manipulation by grounding high-level semantic instructions into executable physical actions. However, prevailing approaches typically adopt a monolithic generation paradigm, directly mapping visual-linguistic features to high-frequency motor commands in a flat, non-hierarchical fashion. This strategy overlooks the inherent hierarchy of robotic manipulation, where complex actions can be naturally modeled in a Hybrid Action Space, decomposing into discrete macro-directional reaching and continuous micro-pose alignment, severely widening the semantic-actuation gap and imposing a heavy representational burden on grounding high-level semantics to continuous actions. To address this, we introduce Libra-VLA, a novel Coarse-to-Fine Dual-System VLA architecture. We explicitly decouple the learning complexity into a coarse-to-fine hierarchy to strike a training equilibrium, while simultaneously leveraging this structural modularity to implement an asynchronous execution strategy. The Semantic Planner predicts discrete action tokens capturing macro-directional intent, while the Action Refiner conditions on coarse intent to generate high-frequency continuous actions for precise alignment. Crucially, our empirical analysis reveals that performance follows an inverted-U curve relative to action decomposition granularity, peaking exactly when the learning difficulty is balanced between the two sub-systems. With the asynchronous design, our approach offers a scalable, robust, and responsive solution for open-world manipulation.
RoboClaw: An Agentic Framework for Scalable Long-Horizon Robotic Tasks
Mar 12, 2026Vision-Language-Action (VLA) systems have shown strong potential for language-driven robotic manipulation. However, scaling them to long-horizon tasks remains challenging. Existing pipelines typically separate data collection, policy learning, and deployment, resulting in heavy reliance on manual environment resets and brittle multi-policy execution. We present RoboClaw, an agentic robotics framework that unifies data collection, policy learning, and task execution under a single VLM-driven controller. At the policy level, RoboClaw introduces Entangled Action Pairs (EAP), which couple forward manipulation behaviors with inverse recovery actions to form self-resetting loops for autonomous data collection. This mechanism enables continuous on-policy data acquisition and iterative policy refinement with minimal human intervention. During deployment, the same agent performs high-level reasoning and dynamically orchestrates learned policy primitives to accomplish long-horizon tasks. By maintaining consistent contextual semantics across collection and execution, RoboClaw reduces mismatch between the two phases and improves multi-policy robustness. Experiments in real-world manipulation tasks demonstrate improved stability and scalability compared to conventional open-loop pipelines, while significantly reducing human effort throughout the robot lifecycle, achieving a 25% improvement in success rate over baseline methods on long-horizon tasks and reducing human time investment by 53.7%.
ACoT-VLA: Action Chain-of-Thought for Vision-Language-Action Models
Jan 16, 2026Vision-Language-Action (VLA) models have emerged as essential generalist robot policies for diverse manipulation tasks, conventionally relying on directly translating multimodal inputs into actions via Vision-Language Model (VLM) embeddings. Recent advancements have introduced explicit intermediary reasoning, such as sub-task prediction (language) or goal image synthesis (vision), to guide action generation. However, these intermediate reasoning are often indirect and inherently limited in their capacity to convey the full, granular information required for precise action execution. Instead, we posit that the most effective form of reasoning is one that deliberates directly in the action space. We introduce Action Chain-of-Thought (ACoT), a paradigm where the reasoning process itself is formulated as a structured sequence of coarse action intents that guide the final policy. In this paper, we propose ACoT-VLA, a novel architecture that materializes the ACoT paradigm. Specifically, we introduce two complementary components: an Explicit Action Reasoner (EAR) and Implicit Action Reasoner (IAR). The former proposes coarse reference trajectories as explicit action-level reasoning steps, while the latter extracts latent action priors from internal representations of multimodal input, co-forming an ACoT that conditions the downstream action head to enable grounded policy learning. Extensive experiments in real-world and simulation environments demonstrate the superiority of our proposed method, which achieves 98.5%, 84.1%, and 47.4% on LIBERO, LIBERO-Plus and VLABench, respectively.
Unified Embodied VLM Reasoning with Robotic Action via Autoregressive Discretized Pre-training
Dec 30, 2025General-purpose robotic systems operating in open-world environments must achieve both broad generalization and high-precision action execution, a combination that remains challenging for existing Vision-Language-Action (VLA) models. While large Vision-Language Models (VLMs) improve semantic generalization, insufficient embodied reasoning leads to brittle behavior, and conversely, strong reasoning alone is inadequate without precise control. To provide a decoupled and quantitative assessment of this bottleneck, we introduce Embodied Reasoning Intelligence Quotient (ERIQ), a large-scale embodied reasoning benchmark in robotic manipulation, comprising 6K+ question-answer pairs across four reasoning dimensions. By decoupling reasoning from execution, ERIQ enables systematic evaluation and reveals a strong positive correlation between embodied reasoning capability and end-to-end VLA generalization. To bridge the gap from reasoning to precise execution, we propose FACT, a flow-matching-based action tokenizer that converts continuous control into discrete sequences while preserving high-fidelity trajectory reconstruction. The resulting GenieReasoner jointly optimizes reasoning and action in a unified space, outperforming both continuous-action and prior discrete-action baselines in real-world tasks. Together, ERIQ and FACT provide a principled framework for diagnosing and overcoming the reasoning-precision trade-off, advancing robust, general-purpose robotic manipulation.
Act2Goal: From World Model To General Goal-conditioned Policy
Dec 29, 2025Specifying robotic manipulation tasks in a manner that is both expressive and precise remains a central challenge. While visual goals provide a compact and unambiguous task specification, existing goal-conditioned policies often struggle with long-horizon manipulation due to their reliance on single-step action prediction without explicit modeling of task progress. We propose Act2Goal, a general goal-conditioned manipulation policy that integrates a goal-conditioned visual world model with multi-scale temporal control. Given a current observation and a target visual goal, the world model generates a plausible sequence of intermediate visual states that captures long-horizon structure. To translate this visual plan into robust execution, we introduce Multi-Scale Temporal Hashing (MSTH), which decomposes the imagined trajectory into dense proximal frames for fine-grained closed-loop control and sparse distal frames that anchor global task consistency. The policy couples these representations with motor control through end-to-end cross-attention, enabling coherent long-horizon behavior while remaining reactive to local disturbances. Act2Goal achieves strong zero-shot generalization to novel objects, spatial layouts, and environments. We further enable reward-free online adaptation through hindsight goal relabeling with LoRA-based finetuning, allowing rapid autonomous improvement without external supervision. Real-robot experiments demonstrate that Act2Goal improves success rates from 30% to 90% on challenging out-of-distribution tasks within minutes of autonomous interaction, validating that goal-conditioned world models with multi-scale temporal control provide structured guidance necessary for robust long-horizon manipulation. Project page: https://act2goal.github.io/
Real2Edit2Real: Generating Robotic Demonstrations via a 3D Control Interface
Dec 22, 2025Recent progress in robot learning has been driven by large-scale datasets and powerful visuomotor policy architectures, yet policy robustness remains limited by the substantial cost of collecting diverse demonstrations, particularly for spatial generalization in manipulation tasks. To reduce repetitive data collection, we present Real2Edit2Real, a framework that generates new demonstrations by bridging 3D editability with 2D visual data through a 3D control interface. Our approach first reconstructs scene geometry from multi-view RGB observations with a metric-scale 3D reconstruction model. Based on the reconstructed geometry, we perform depth-reliable 3D editing on point clouds to generate new manipulation trajectories while geometrically correcting the robot poses to recover physically consistent depth, which serves as a reliable condition for synthesizing new demonstrations. Finally, we propose a multi-conditional video generation model guided by depth as the primary control signal, together with action, edge, and ray maps, to synthesize spatially augmented multi-view manipulation videos. Experiments on four real-world manipulation tasks demonstrate that policies trained on data generated from only 1-5 source demonstrations can match or outperform those trained on 50 real-world demonstrations, improving data efficiency by up to 10-50x. Moreover, experimental results on height and texture editing demonstrate the framework's flexibility and extensibility, indicating its potential to serve as a unified data generation framework.
EmbodiedOneVision: Interleaved Vision-Text-Action Pretraining for General Robot Control
Aug 28, 2025The human ability to seamlessly perform multimodal reasoning and physical interaction in the open world is a core goal for general-purpose embodied intelligent systems. Recent vision-language-action (VLA) models, which are co-trained on large-scale robot and visual-text data, have demonstrated notable progress in general robot control. However, they still fail to achieve human-level flexibility in interleaved reasoning and interaction. In this work, introduce EO-Robotics, consists of EO-1 model and EO-Data1.5M dataset. EO-1 is a unified embodied foundation model that achieves superior performance in multimodal embodied reasoning and robot control through interleaved vision-text-action pre-training. The development of EO-1 is based on two key pillars: (i) a unified architecture that processes multimodal inputs indiscriminately (image, text, video, and action), and (ii) a massive, high-quality multimodal embodied reasoning dataset, EO-Data1.5M, which contains over 1.5 million samples with emphasis on interleaved vision-text-action comprehension. EO-1 is trained through synergies between auto-regressive decoding and flow matching denoising on EO-Data1.5M, enabling seamless robot action generation and multimodal embodied reasoning. Extensive experiments demonstrate the effectiveness of interleaved vision-text-action learning for open-world understanding and generalization, validated through a variety of long-horizon, dexterous manipulation tasks across multiple embodiments. This paper details the architecture of EO-1, the data construction strategy of EO-Data1.5M, and the training methodology, offering valuable insights for developing advanced embodied foundation models.
Genie Envisioner: A Unified World Foundation Platform for Robotic Manipulation
Aug 07, 2025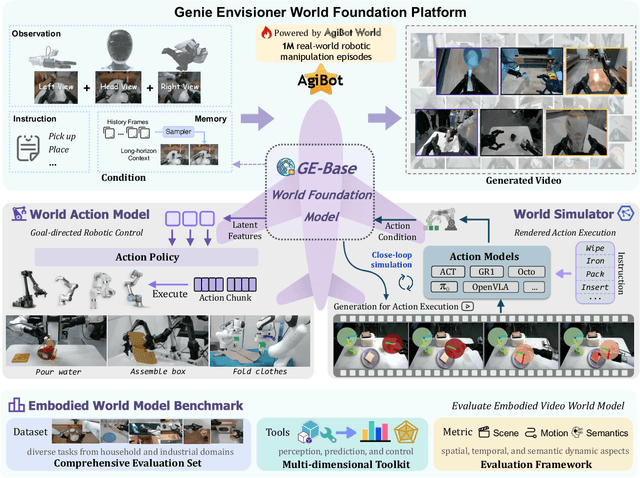
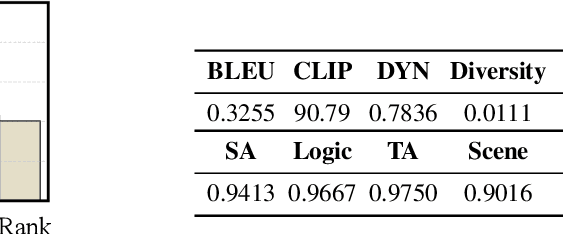
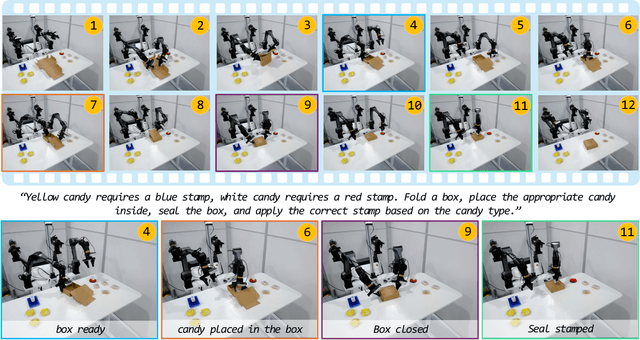
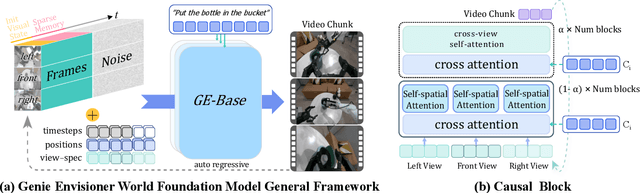
We introduce Genie Envisioner (GE), a unified world foundation platform for robotic manipulation that integrates policy learning, evaluation, and simulation within a single video-generative framework. At its core, GE-Base is a large-scale, instruction-conditioned video diffusion model that captures the spatial, temporal, and semantic dynamics of real-world robotic interactions in a structured latent space. Built upon this foundation, GE-Act maps latent representations to executable action trajectories through a lightweight, flow-matching decoder, enabling precise and generalizable policy inference across diverse embodiments with minimal supervision. To support scalable evaluation and training, GE-Sim serves as an action-conditioned neural simulator, producing high-fidelity rollouts for closed-loop policy development. The platform is further equipped with EWMBench, a standardized benchmark suite measuring visual fidelity, physical consistency, and instruction-action alignment. Together, these components establish Genie Envisioner as a scalable and practical foundation for instruction-driven, general-purpose embodied intelligence. All code, models, and benchmarks will be released publicly.
Is Diversity All You Need for Scalable Robotic Manipulation?
Jul 08, 2025Data scaling has driven remarkable success in foundation models for Natural Language Processing (NLP) and Computer Vision (CV), yet the principles of effective data scaling in robotic manipulation remain insufficiently understood. In this work, we investigate the nuanced role of data diversity in robot learning by examining three critical dimensions-task (what to do), embodiment (which robot to use), and expert (who demonstrates)-challenging the conventional intuition of "more diverse is better". Throughout extensive experiments on various robot platforms, we reveal that (1) task diversity proves more critical than per-task demonstration quantity, benefiting transfer from diverse pre-training tasks to novel downstream scenarios; (2) multi-embodiment pre-training data is optional for cross-embodiment transfer-models trained on high-quality single-embodiment data can efficiently transfer to different platforms, showing more desirable scaling property during fine-tuning than multi-embodiment pre-trained models; and (3) expert diversity, arising from individual operational preferences and stochastic variations in human demonstrations, can be confounding to policy learning, with velocity multimodality emerging as a key contributing factor. Based on this insight, we propose a distribution debiasing method to mitigate velocity ambiguity, the yielding GO-1-Pro achieves substantial performance gains of 15%, equivalent to using 2.5 times pre-training data. Collectively, these findings provide new perspectives and offer practical guidance on how to scale robotic manipulation datasets effectively.
Hume: Introducing System-2 Thinking in Visual-Language-Action Model
May 29, 2025



Humans practice slow thinking before performing actual actions when handling complex tasks in the physical world. This thinking paradigm, recently, has achieved remarkable advancement in boosting Large Language Models (LLMs) to solve complex tasks in digital domains. However, the potential of slow thinking remains largely unexplored for robotic foundation models interacting with the physical world. In this work, we propose Hume: a dual-system Vision-Language-Action (VLA) model with value-guided System-2 thinking and cascaded action denoising, exploring human-like thinking capabilities of Vision-Language-Action models for dexterous robot control. System 2 of Hume implements value-Guided thinking by extending a Vision-Language-Action Model backbone with a novel value-query head to estimate the state-action value of predicted actions. The value-guided thinking is conducted by repeat sampling multiple action candidates and selecting one according to state-action value. System 1 of Hume is a lightweight reactive visuomotor policy that takes System 2 selected action and performs cascaded action denoising for dexterous robot control. At deployment time, System 2 performs value-guided thinking at a low frequency while System 1 asynchronously receives the System 2 selected action candidate and predicts fluid actions in real time. We show that Hume outperforms the existing state-of-the-art Vision-Language-Action models across multiple simulation benchmark and real-robot deployments.