 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTCM-Eval: An Expert-Level Dynamic and Extensible Benchmark for Traditional Chinese Medicine
Nov 10, 2025Large Language Models (LLMs) have demonstrated remarkable capabilities in modern medicine, yet their application in Traditional Chinese Medicine (TCM) remains severely limited by the absence of standardized benchmarks and the scarcity of high-quality training data. To address these challenges, we introduce TCM-Eval, the first dynamic and extensible benchmark for TCM, meticulously curated from national medical licensing examinations and validated by TCM experts. Furthermore, we construct a large-scale training corpus and propose Self-Iterative Chain-of-Thought Enhancement (SI-CoTE) to autonomously enrich question-answer pairs with validated reasoning chains through rejection sampling, establishing a virtuous cycle of data and model co-evolution. Using this enriched training data, we develop ZhiMingTang (ZMT), a state-of-the-art LLM specifically designed for TCM, which significantly exceeds the passing threshold for human practitioners. To encourage future research and development, we release a public leaderboard, fostering community engagement and continuous improvement.
Doc-Researcher: A Unified System for Multimodal Document Parsing and Deep Research
Oct 24, 2025Deep Research systems have revolutionized how LLMs solve complex questions through iterative reasoning and evidence gathering. However, current systems remain fundamentally constrained to textual web data, overlooking the vast knowledge embedded in multimodal documents Processing such documents demands sophisticated parsing to preserve visual semantics (figures, tables, charts, and equations), intelligent chunking to maintain structural coherence, and adaptive retrieval across modalities, which are capabilities absent in existing systems. In response, we present Doc-Researcher, a unified system that bridges this gap through three integrated components: (i) deep multimodal parsing that preserves layout structure and visual semantics while creating multi-granular representations from chunk to document level, (ii) systematic retrieval architecture supporting text-only, vision-only, and hybrid paradigms with dynamic granularity selection, and (iii) iterative multi-agent workflows that decompose complex queries, progressively accumulate evidence, and synthesize comprehensive answers across documents and modalities. To enable rigorous evaluation, we introduce M4DocBench, the first benchmark for Multi-modal, Multi-hop, Multi-document, and Multi-turn deep research. Featuring 158 expert-annotated questions with complete evidence chains across 304 documents, M4DocBench tests capabilities that existing benchmarks cannot assess. Experiments demonstrate that Doc-Researcher achieves 50.6% accuracy, 3.4xbetter than state-of-the-art baselines, validating that effective document research requires not just better retrieval, but fundamentally deep parsing that preserve multimodal integrity and support iterative research. Our work establishes a new paradigm for conducting deep research on multimodal document collections.
OneRec-V2 Technical Report
Aug 28, 2025



Recent breakthroughs in generative AI have transformed recommender systems through end-to-end generation. OneRec reformulates recommendation as an autoregressive generation task, achieving high Model FLOPs Utilization. While OneRec-V1 has shown significant empirical success in real-world deployment, two critical challenges hinder its scalability and performance: (1) inefficient computational allocation where 97.66% of resources are consumed by sequence encoding rather than generation, and (2) limitations in reinforcement learning relying solely on reward models. To address these challenges, we propose OneRec-V2, featuring: (1) Lazy Decoder-Only Architecture: Eliminates encoder bottlenecks, reducing total computation by 94% and training resources by 90%, enabling successful scaling to 8B parameters. (2) Preference Alignment with Real-World User Interactions: Incorporates Duration-Aware Reward Shaping and Adaptive Ratio Clipping to better align with user preferences using real-world feedback. Extensive A/B tests on Kuaishou demonstrate OneRec-V2's effectiveness, improving App Stay Time by 0.467%/0.741% while balancing multi-objective recommendations. This work advances generative recommendation scalability and alignment with real-world feedback, representing a step forward in the development of end-to-end recommender systems.
Next Tokens Denoising for Speech Synthesis
Jul 30, 2025While diffusion and autoregressive (AR) models have significantly advanced generative modeling, they each present distinct limitations. AR models, which rely on causal attention, cannot exploit future context and suffer from slow generation speeds. Conversely, diffusion models struggle with key-value (KV) caching. To overcome these challenges, we introduce Dragon-FM, a novel text-to-speech (TTS) design that unifies AR and flow-matching. This model processes 48 kHz audio codec tokens in chunks at a compact 12.5 tokens per second rate. This design enables AR modeling across chunks, ensuring global coherence, while parallel flow-matching within chunks facilitates fast iterative denoising. Consequently, the proposed model can utilize KV-cache across chunks and incorporate future context within each chunk. Furthermore, it bridges continuous and discrete feature modeling, demonstrating that continuous AR flow-matching can predict discrete tokens with finite scalar quantizers. This efficient codec and fast chunk-autoregressive architecture also makes the proposed model particularly effective for generating extended content. Experiment for demos of our work} on podcast datasets demonstrate its capability to efficiently generate high-quality zero-shot podcasts.
OneRec Technical Report
Jun 16, 2025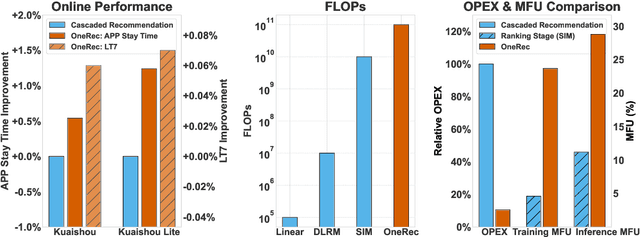

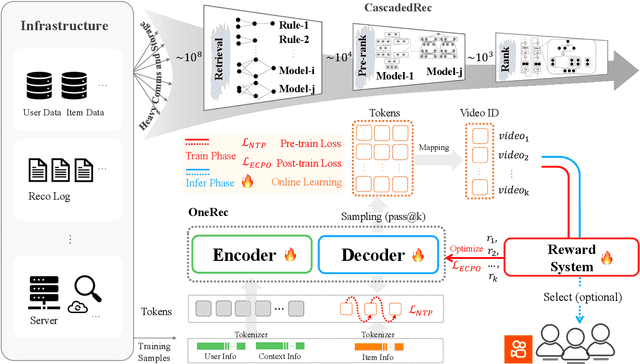
Recommender systems have been widely used in various large-scale user-oriented platforms for many years. However, compared to the rapid developments in the AI community, recommendation systems have not achieved a breakthrough in recent years. For instance, they still rely on a multi-stage cascaded architecture rather than an end-to-end approach, leading to computational fragmentation and optimization inconsistencies, and hindering the effective application of key breakthrough technologies from the AI community in recommendation scenarios. To address these issues, we propose OneRec, which reshapes the recommendation system through an end-to-end generative approach and achieves promising results. Firstly, we have enhanced the computational FLOPs of the current recommendation model by 10 $\times$ and have identified the scaling laws for recommendations within certain boundaries. Secondly, reinforcement learning techniques, previously difficult to apply for optimizing recommendations, show significant potential in this framework. Lastly, through infrastructure optimizations, we have achieved 23.7% and 28.8% Model FLOPs Utilization (MFU) on flagship GPUs during training and inference, respectively, aligning closely with the LLM community. This architecture significantly reduces communication and storage overhead, resulting in operating expense that is only 10.6% of traditional recommendation pipelines. Deployed in Kuaishou/Kuaishou Lite APP, it handles 25% of total queries per second, enhancing overall App Stay Time by 0.54% and 1.24%, respectively. Additionally, we have observed significant increases in metrics such as 7-day Lifetime, which is a crucial indicator of recommendation experience. We also provide practical lessons and insights derived from developing, optimizing, and maintaining a production-scale recommendation system with significant real-world impact.
Restoring Gaussian Blurred Face Images for Deanonymization Attacks
Jun 14, 2025Gaussian blur is widely used to blur human faces in sensitive photos before the photos are posted on the Internet. However, it is unclear to what extent the blurred faces can be restored and used to re-identify the person, especially under a high-blurring setting. In this paper, we explore this question by developing a deblurring method called Revelio. The key intuition is to leverage a generative model's memorization effect and approximate the inverse function of Gaussian blur for face restoration. Compared with existing methods, we design the deblurring process to be identity-preserving. It uses a conditional Diffusion model for preliminary face restoration and then uses an identity retrieval model to retrieve related images to further enhance fidelity. We evaluate Revelio with large public face image datasets and show that it can effectively restore blurred faces, especially under a high-blurring setting. It has a re-identification accuracy of 95.9%, outperforming existing solutions. The result suggests that Gaussian blur should not be used for face anonymization purposes. We also demonstrate the robustness of this method against mismatched Gaussian kernel sizes and functions, and test preliminary countermeasures and adaptive attacks to inspire future work.
EvdCLIP: Improving Vision-Language Retrieval with Entity Visual Descriptions from Large Language Models
May 24, 2025Vision-language retrieval (VLR) has attracted significant attention in both academia and industry, which involves using text (or images) as queries to retrieve corresponding images (or text). However, existing methods often neglect the rich visual semantics knowledge of entities, thus leading to incorrect retrieval results. To address this problem, we propose the Entity Visual Description enhanced CLIP (EvdCLIP), designed to leverage the visual knowledge of entities to enrich queries. Specifically, since humans recognize entities through visual cues, we employ a large language model (LLM) to generate Entity Visual Descriptions (EVDs) as alignment cues to complement textual data. These EVDs are then integrated into raw queries to create visually-rich, EVD-enhanced queries. Furthermore, recognizing that EVD-enhanced queries may introduce noise or low-quality expansions, we develop a novel, trainable EVD-aware Rewriter (EaRW) for vision-language retrieval tasks. EaRW utilizes EVD knowledge and the generative capabilities of the language model to effectively rewrite queries. With our specialized training strategy, EaRW can generate high-quality and low-noise EVD-enhanced queries. Extensive quantitative and qualitative experiments on image-text retrieval benchmarks validate the superiority of EvdCLIP on vision-language retrieval tasks.
Demystifying and Enhancing the Efficiency of Large Language Model Based Search Agents
May 17, 2025Large Language Model (LLM)-based search agents have shown remarkable capabilities in solving complex tasks by dynamically decomposing problems and addressing them through interleaved reasoning and retrieval. However, this interleaved paradigm introduces substantial efficiency bottlenecks. First, we observe that both highly accurate and overly approximate retrieval methods degrade system efficiency: exact search incurs significant retrieval overhead, while coarse retrieval requires additional reasoning steps during generation. Second, we identify inefficiencies in system design, including improper scheduling and frequent retrieval stalls, which lead to cascading latency -- where even minor delays in retrieval amplify end-to-end inference time. To address these challenges, we introduce SearchAgent-X, a high-efficiency inference framework for LLM-based search agents. SearchAgent-X leverages high-recall approximate retrieval and incorporates two key techniques: priority-aware scheduling and non-stall retrieval. Extensive experiments demonstrate that SearchAgent-X consistently outperforms state-of-the-art systems such as vLLM and HNSW-based retrieval across diverse tasks, achieving up to 3.4$\times$ higher throughput and 5$\times$ lower latency, without compromising generation quality. SearchAgent-X is available at https://github.com/tiannuo-yang/SearchAgent-X.
MiMo: Unlocking the Reasoning Potential of Language Model -- From Pretraining to Posttraining
May 12, 2025We present MiMo-7B, a large language model born for reasoning tasks, with optimization across both pre-training and post-training stages. During pre-training, we enhance the data preprocessing pipeline and employ a three-stage data mixing strategy to strengthen the base model's reasoning potential. MiMo-7B-Base is pre-trained on 25 trillion tokens, with additional Multi-Token Prediction objective for enhanced performance and accelerated inference speed. During post-training, we curate a dataset of 130K verifiable mathematics and programming problems for reinforcement learning, integrating a test-difficulty-driven code-reward scheme to alleviate sparse-reward issues and employing strategic data resampling to stabilize training. Extensive evaluations show that MiMo-7B-Base possesses exceptional reasoning potential, outperforming even much larger 32B models. The final RL-tuned model, MiMo-7B-RL, achieves superior performance on mathematics, code and general reasoning tasks, surpassing the performance of OpenAI o1-mini. The model checkpoints are available at https://github.com/xiaomimimo/MiMo.
Multi-agent Embodied AI: Advances and Future Directions
May 08, 2025Embodied artificial intelligence (Embodied AI) plays a pivotal role in the application of advanced technologies in the intelligent era, where AI systems are integrated with physical bodies that enable them to perceive, reason, and interact with their environments. Through the use of sensors for input and actuators for action, these systems can learn and adapt based on real-world feedback, allowing them to perform tasks effectively in dynamic and unpredictable environments. As techniques such as deep learning (DL), reinforcement learning (RL), and large language models (LLMs) mature, embodied AI has become a leading field in both academia and industry, with applications spanning robotics, healthcare, transportation, and manufacturing. However, most research has focused on single-agent systems that often assume static, closed environments, whereas real-world embodied AI must navigate far more complex scenarios. In such settings, agents must not only interact with their surroundings but also collaborate with other agents, necessitating sophisticated mechanisms for adaptation, real-time learning, and collaborative problem-solving. Despite increasing interest in multi-agent systems, existing research remains narrow in scope, often relying on simplified models that fail to capture the full complexity of dynamic, open environments for multi-agent embodied AI. Moreover, no comprehensive survey has systematically reviewed the advancements in this area. As embodied AI rapidly evolves, it is crucial to deepen our understanding of multi-agent embodied AI to address the challenges presented by real-world applications. To fill this gap and foster further development in the field, this paper reviews the current state of research, analyzes key contributions, and identifies challenges and future directions, providing insights to guide innovation and progress in this field.