 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDoes Thinking More always Help? Understanding Test-Time Scaling in Reasoning Models
Jun 04, 2025



Recent trends in test-time scaling for reasoning models (e.g., OpenAI o1, DeepSeek R1) have led to a popular belief that extending thinking traces using prompts like "Wait" or "Let me rethink" can improve performance. This raises a natural question: Does thinking more at test-time truly lead to better reasoning? To answer this question, we perform a detailed empirical study across models and benchmarks, which reveals a consistent pattern of initial performance improvements from additional thinking followed by a decline, due to "overthinking". To understand this non-monotonic trend, we consider a simple probabilistic model, which reveals that additional thinking increases output variance-creating an illusion of improved reasoning while ultimately undermining precision. Thus, observed gains from "more thinking" are not true indicators of improved reasoning, but artifacts stemming from the connection between model uncertainty and evaluation metric. This suggests that test-time scaling through extended thinking is not an effective way to utilize the inference thinking budget. Recognizing these limitations, we introduce an alternative test-time scaling approach, parallel thinking, inspired by Best-of-N sampling. Our method generates multiple independent reasoning paths within the same inference budget and selects the most consistent response via majority vote, achieving up to 20% higher accuracy compared to extended thinking. This provides a simple yet effective mechanism for test-time scaling of reasoning models.
EnsemW2S: Enhancing Weak-to-Strong Generalization with Large Language Model Ensembles
May 28, 2025With Large Language Models (LLMs) rapidly approaching and potentially surpassing human-level performance, it has become imperative to develop approaches capable of effectively supervising and enhancing these powerful models using smaller, human-level models exposed to only human-level data. We address this critical weak-to-strong (W2S) generalization challenge by proposing a novel method aimed at improving weak experts, by training on the same limited human-level data, enabling them to generalize to complex, super-human-level tasks. Our approach, called \textbf{EnsemW2S}, employs a token-level ensemble strategy that iteratively combines multiple weak experts, systematically addressing the shortcomings identified in preceding iterations. By continuously refining these weak models, we significantly enhance their collective ability to supervise stronger student models. We extensively evaluate the generalization performance of both the ensemble of weak experts and the subsequent strong student model across in-distribution (ID) and out-of-distribution (OOD) datasets. For OOD, we specifically introduce question difficulty as an additional dimension for defining distributional shifts. Our empirical results demonstrate notable improvements, achieving 4\%, and 3.2\% improvements on ID datasets and, upto 6\% and 2.28\% on OOD datasets for experts and student models respectively, underscoring the effectiveness of our proposed method in advancing W2S generalization.
Zero-Shot Vision Encoder Grafting via LLM Surrogates
May 28, 2025



Vision language models (VLMs) typically pair a modestly sized vision encoder with a large language model (LLM), e.g., Llama-70B, making the decoder the primary computational burden during training. To reduce costs, a potential promising strategy is to first train the vision encoder using a small language model before transferring it to the large one. We construct small "surrogate models" that share the same embedding space and representation language as the large target LLM by directly inheriting its shallow layers. Vision encoders trained on the surrogate can then be directly transferred to the larger model, a process we call zero-shot grafting -- when plugged directly into the full-size target LLM, the grafted pair surpasses the encoder-surrogate pair and, on some benchmarks, even performs on par with full decoder training with the target LLM. Furthermore, our surrogate training approach reduces overall VLM training costs by ~45% when using Llama-70B as the decoder.
Effort-aware Fairness: Incorporating a Philosophy-informed, Human-centered Notion of Effort into Algorithmic Fairness Metrics
May 25, 2025



Although popularized AI fairness metrics, e.g., demographic parity, have uncovered bias in AI-assisted decision-making outcomes, they do not consider how much effort one has spent to get to where one is today in the input feature space. However, the notion of effort is important in how Philosophy and humans understand fairness. We propose a philosophy-informed way to conceptualize and evaluate Effort-aware Fairness (EaF) based on the concept of Force, or temporal trajectory of predictive features coupled with inertia. In addition to our theoretical formulation of EaF metrics, our empirical contributions include: 1/ a pre-registered human subjects experiment, which demonstrates that for both stages of the (individual) fairness evaluation process, people consider the temporal trajectory of a predictive feature more than its aggregate value; 2/ pipelines to compute Effort-aware Individual/Group Fairness in the criminal justice and personal finance contexts. Our work may enable AI model auditors to uncover and potentially correct unfair decisions against individuals who spent significant efforts to improve but are still stuck with systemic/early-life disadvantages outside their control.
FLARE: Robot Learning with Implicit World Modeling
May 21, 2025We introduce $\textbf{F}$uture $\textbf{LA}$tent $\textbf{RE}$presentation Alignment ($\textbf{FLARE}$), a novel framework that integrates predictive latent world modeling into robot policy learning. By aligning features from a diffusion transformer with latent embeddings of future observations, $\textbf{FLARE}$ enables a diffusion transformer policy to anticipate latent representations of future observations, allowing it to reason about long-term consequences while generating actions. Remarkably lightweight, $\textbf{FLARE}$ requires only minimal architectural modifications -- adding a few tokens to standard vision-language-action (VLA) models -- yet delivers substantial performance gains. Across two challenging multitask simulation imitation learning benchmarks spanning single-arm and humanoid tabletop manipulation, $\textbf{FLARE}$ achieves state-of-the-art performance, outperforming prior policy learning baselines by up to 26%. Moreover, $\textbf{FLARE}$ unlocks the ability to co-train with human egocentric video demonstrations without action labels, significantly boosting policy generalization to a novel object with unseen geometry with as few as a single robot demonstration. Our results establish $\textbf{FLARE}$ as a general and scalable approach for combining implicit world modeling with high-frequency robotic control.
DISCO Balances the Scales: Adaptive Domain- and Difficulty-Aware Reinforcement Learning on Imbalanced Data
May 21, 2025Large Language Models (LLMs) are increasingly aligned with human preferences through Reinforcement Learning from Human Feedback (RLHF). Among RLHF methods, Group Relative Policy Optimization (GRPO) has gained attention for its simplicity and strong performance, notably eliminating the need for a learned value function. However, GRPO implicitly assumes a balanced domain distribution and uniform semantic alignment across groups - assumptions that rarely hold in real-world datasets. When applied to multi-domain, imbalanced data, GRPO disproportionately optimizes for dominant domains, neglecting underrepresented ones and resulting in poor generalization and fairness. We propose Domain-Informed Self-Consistency Policy Optimization (DISCO), a principled extension to GRPO that addresses inter-group imbalance with two key innovations. Domain-aware reward scaling counteracts frequency bias by reweighting optimization based on domain prevalence. Difficulty-aware reward scaling leverages prompt-level self-consistency to identify and prioritize uncertain prompts that offer greater learning value. Together, these strategies promote more equitable and effective policy learning across domains. Extensive experiments across multiple LLMs and skewed training distributions show that DISCO improves generalization, outperforms existing GRPO variants by 5% on Qwen3 models, and sets new state-of-the-art results on multi-domain alignment benchmarks.
Imagine, Verify, Execute: Memory-Guided Agentic Exploration with Vision-Language Models
May 12, 2025
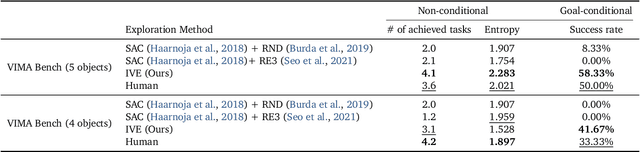


Exploration is essential for general-purpose robotic learning, especially in open-ended environments where dense rewards, explicit goals, or task-specific supervision are scarce. Vision-language models (VLMs), with their semantic reasoning over objects, spatial relations, and potential outcomes, present a compelling foundation for generating high-level exploratory behaviors. However, their outputs are often ungrounded, making it difficult to determine whether imagined transitions are physically feasible or informative. To bridge the gap between imagination and execution, we present IVE (Imagine, Verify, Execute), an agentic exploration framework inspired by human curiosity. Human exploration is often driven by the desire to discover novel scene configurations and to deepen understanding of the environment. Similarly, IVE leverages VLMs to abstract RGB-D observations into semantic scene graphs, imagine novel scenes, predict their physical plausibility, and generate executable skill sequences through action tools. We evaluate IVE in both simulated and real-world tabletop environments. The results show that IVE enables more diverse and meaningful exploration than RL baselines, as evidenced by a 4.1 to 7.8x increase in the entropy of visited states. Moreover, the collected experience supports downstream learning, producing policies that closely match or exceed the performance of those trained on human-collected demonstrations.
AegisLLM: Scaling Agentic Systems for Self-Reflective Defense in LLM Security
Apr 29, 2025We introduce AegisLLM, a cooperative multi-agent defense against adversarial attacks and information leakage. In AegisLLM, a structured workflow of autonomous agents - orchestrator, deflector, responder, and evaluator - collaborate to ensure safe and compliant LLM outputs, while self-improving over time through prompt optimization. We show that scaling agentic reasoning system at test-time - both by incorporating additional agent roles and by leveraging automated prompt optimization (such as DSPy)- substantially enhances robustness without compromising model utility. This test-time defense enables real-time adaptability to evolving attacks, without requiring model retraining. Comprehensive evaluations across key threat scenarios, including unlearning and jailbreaking, demonstrate the effectiveness of AegisLLM. On the WMDP unlearning benchmark, AegisLLM achieves near-perfect unlearning with only 20 training examples and fewer than 300 LM calls. For jailbreaking benchmarks, we achieve 51% improvement compared to the base model on StrongReject, with false refusal rates of only 7.9% on PHTest compared to 18-55% for comparable methods. Our results highlight the advantages of adaptive, agentic reasoning over static defenses, establishing AegisLLM as a strong runtime alternative to traditional approaches based on model modifications. Code is available at https://github.com/zikuicai/aegisllm
SoTA with Less: MCTS-Guided Sample Selection for Data-Efficient Visual Reasoning Self-Improvement
Apr 10, 2025



In this paper, we present an effective method to enhance visual reasoning with significantly fewer training samples, relying purely on self-improvement with no knowledge distillation. Our key insight is that the difficulty of training data during reinforcement fine-tuning (RFT) is critical. Appropriately challenging samples can substantially boost reasoning capabilities even when the dataset is small. Despite being intuitive, the main challenge remains in accurately quantifying sample difficulty to enable effective data filtering. To this end, we propose a novel way of repurposing Monte Carlo Tree Search (MCTS) to achieve that. Starting from our curated 70k open-source training samples, we introduce an MCTS-based selection method that quantifies sample difficulty based on the number of iterations required by the VLMs to solve each problem. This explicit step-by-step reasoning in MCTS enforces the model to think longer and better identifies samples that are genuinely challenging. We filter and retain 11k samples to perform RFT on Qwen2.5-VL-7B-Instruct, resulting in our final model, ThinkLite-VL. Evaluation results on eight benchmarks show that ThinkLite-VL improves the average performance of Qwen2.5-VL-7B-Instruct by 7%, using only 11k training samples with no knowledge distillation. This significantly outperforms all existing 7B-level reasoning VLMs, and our fairly comparable baselines that use classic selection methods such as accuracy-based filtering. Notably, on MathVista, ThinkLite-VL-7B achieves the SoTA accuracy of 75.1, surpassing Qwen2.5-VL-72B, GPT-4o, and O1. Our code, data, and model are available at https://github.com/si0wang/ThinkLite-VL.
Like Oil and Water: Group Robustness Methods and Poisoning Defenses May Be at Odds
Apr 02, 2025



Group robustness has become a major concern in machine learning (ML) as conventional training paradigms were found to produce high error on minority groups. Without explicit group annotations, proposed solutions rely on heuristics that aim to identify and then amplify the minority samples during training. In our work, we first uncover a critical shortcoming of these methods: an inability to distinguish legitimate minority samples from poison samples in the training set. By amplifying poison samples as well, group robustness methods inadvertently boost the success rate of an adversary -- e.g., from $0\%$ without amplification to over $97\%$ with it. Notably, we supplement our empirical evidence with an impossibility result proving this inability of a standard heuristic under some assumptions. Moreover, scrutinizing recent poisoning defenses both in centralized and federated learning, we observe that they rely on similar heuristics to identify which samples should be eliminated as poisons. In consequence, minority samples are eliminated along with poisons, which damages group robustness -- e.g., from $55\%$ without the removal of the minority samples to $41\%$ with it. Finally, as they pursue opposing goals using similar heuristics, our attempt to alleviate the trade-off by combining group robustness methods and poisoning defenses falls short. By exposing this tension, we also hope to highlight how benchmark-driven ML scholarship can obscure the trade-offs among different metrics with potentially detrimental consequences.