 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWorld Action Models are Zero-shot Policies
Feb 17, 2026State-of-the-art Vision-Language-Action (VLA) models excel at semantic generalization but struggle to generalize to unseen physical motions in novel environments. We introduce DreamZero, a World Action Model (WAM) built upon a pretrained video diffusion backbone. Unlike VLAs, WAMs learn physical dynamics by predicting future world states and actions, using video as a dense representation of how the world evolves. By jointly modeling video and action, DreamZero learns diverse skills effectively from heterogeneous robot data without relying on repetitive demonstrations. This results in over 2x improvement in generalization to new tasks and environments compared to state-of-the-art VLAs in real robot experiments. Crucially, through model and system optimizations, we enable a 14B autoregressive video diffusion model to perform real-time closed-loop control at 7Hz. Finally, we demonstrate two forms of cross-embodiment transfer: video-only demonstrations from other robots or humans yield a relative improvement of over 42% on unseen task performance with just 10-20 minutes of data. More surprisingly, DreamZero enables few-shot embodiment adaptation, transferring to a new embodiment with only 30 minutes of play data while retaining zero-shot generalization.
FLARE: Robot Learning with Implicit World Modeling
May 21, 2025We introduce $\textbf{F}$uture $\textbf{LA}$tent $\textbf{RE}$presentation Alignment ($\textbf{FLARE}$), a novel framework that integrates predictive latent world modeling into robot policy learning. By aligning features from a diffusion transformer with latent embeddings of future observations, $\textbf{FLARE}$ enables a diffusion transformer policy to anticipate latent representations of future observations, allowing it to reason about long-term consequences while generating actions. Remarkably lightweight, $\textbf{FLARE}$ requires only minimal architectural modifications -- adding a few tokens to standard vision-language-action (VLA) models -- yet delivers substantial performance gains. Across two challenging multitask simulation imitation learning benchmarks spanning single-arm and humanoid tabletop manipulation, $\textbf{FLARE}$ achieves state-of-the-art performance, outperforming prior policy learning baselines by up to 26%. Moreover, $\textbf{FLARE}$ unlocks the ability to co-train with human egocentric video demonstrations without action labels, significantly boosting policy generalization to a novel object with unseen geometry with as few as a single robot demonstration. Our results establish $\textbf{FLARE}$ as a general and scalable approach for combining implicit world modeling with high-frequency robotic control.
DreamGen: Unlocking Generalization in Robot Learning through Neural Trajectories
May 19, 2025We introduce DreamGen, a simple yet highly effective 4-stage pipeline for training robot policies that generalize across behaviors and environments through neural trajectories - synthetic robot data generated from video world models. DreamGen leverages state-of-the-art image-to-video generative models, adapting them to the target robot embodiment to produce photorealistic synthetic videos of familiar or novel tasks in diverse environments. Since these models generate only videos, we recover pseudo-action sequences using either a latent action model or an inverse-dynamics model (IDM). Despite its simplicity, DreamGen unlocks strong behavior and environment generalization: a humanoid robot can perform 22 new behaviors in both seen and unseen environments, while requiring teleoperation data from only a single pick-and-place task in one environment. To evaluate the pipeline systematically, we introduce DreamGen Bench, a video generation benchmark that shows a strong correlation between benchmark performance and downstream policy success. Our work establishes a promising new axis for scaling robot learning well beyond manual data collection.
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
Mar 18, 2025General-purpose robots need a versatile body and an intelligent mind. Recent advancements in humanoid robots have shown great promise as a hardware platform for building generalist autonomy in the human world. A robot foundation model, trained on massive and diverse data sources, is essential for enabling the robots to reason about novel situations, robustly handle real-world variability, and rapidly learn new tasks. To this end, we introduce GR00T N1, an open foundation model for humanoid robots. GR00T N1 is a Vision-Language-Action (VLA) model with a dual-system architecture. The vision-language module (System 2) interprets the environment through vision and language instructions. The subsequent diffusion transformer module (System 1) generates fluid motor actions in real time. Both modules are tightly coupled and jointly trained end-to-end. We train GR00T N1 with a heterogeneous mixture of real-robot trajectories, human videos, and synthetically generated datasets. We show that our generalist robot model GR00T N1 outperforms the state-of-the-art imitation learning baselines on standard simulation benchmarks across multiple robot embodiments. Furthermore, we deploy our model on the Fourier GR-1 humanoid robot for language-conditioned bimanual manipulation tasks, achieving strong performance with high data efficiency.
Scaling Optimal LR Across Token Horizon
Sep 30, 2024



State-of-the-art LLMs are powered by scaling -- scaling model size, dataset size and cluster size. It is economically infeasible to extensively tune hyperparameter for the largest runs. Instead, approximately optimal hyperparameters must be inferred or \textit{transferred} from smaller experiments. Hyperparameter transfer across model sizes has been studied in Yang et al. However, hyperparameter transfer across dataset size -- or token horizon -- has not been studied yet. To remedy this we conduct a large scale empirical study on how optimal learning rate (LR) depends on token horizon in LLM training. We first demonstrate that the optimal LR changes significantly with token horizon -- longer training necessitates smaller LR. Secondly we demonstrate the the optimal LR follows a scaling law, and that the optimal LR for longer horizons can be accurately estimated from shorter horizons via our scaling laws. We also provide a rule-of-thumb for transferring LR across token horizons with zero overhead over current practices. Lastly we provide evidence that LLama-1 used too high LR, and estimate the performance hit from this. We thus argue that hyperparameter transfer across data size is an important and overlooked component of LLM training.
Phi-3 Technical Report: A Highly Capable Language Model Locally on Your Phone
Apr 23, 2024



We introduce phi-3-mini, a 3.8 billion parameter language model trained on 3.3 trillion tokens, whose overall performance, as measured by both academic benchmarks and internal testing, rivals that of models such as Mixtral 8x7B and GPT-3.5 (e.g., phi-3-mini achieves 69% on MMLU and 8.38 on MT-bench), despite being small enough to be deployed on a phone. The innovation lies entirely in our dataset for training, a scaled-up version of the one used for phi-2, composed of heavily filtered web data and synthetic data. The model is also further aligned for robustness, safety, and chat format. We also provide some initial parameter-scaling results with a 7B and 14B models trained for 4.8T tokens, called phi-3-small and phi-3-medium, both significantly more capable than phi-3-mini (e.g., respectively 75% and 78% on MMLU, and 8.7 and 8.9 on MT-bench).
Language Is Not All You Need: Aligning Perception with Language Models
Mar 01, 2023



A big convergence of language, multimodal perception, action, and world modeling is a key step toward artificial general intelligence. In this work, we introduce Kosmos-1, a Multimodal Large Language Model (MLLM) that can perceive general modalities, learn in context (i.e., few-shot), and follow instructions (i.e., zero-shot). Specifically, we train Kosmos-1 from scratch on web-scale multimodal corpora, including arbitrarily interleaved text and images, image-caption pairs, and text data. We evaluate various settings, including zero-shot, few-shot, and multimodal chain-of-thought prompting, on a wide range of tasks without any gradient updates or finetuning. Experimental results show that Kosmos-1 achieves impressive performance on (i) language understanding, generation, and even OCR-free NLP (directly fed with document images), (ii) perception-language tasks, including multimodal dialogue, image captioning, visual question answering, and (iii) vision tasks, such as image recognition with descriptions (specifying classification via text instructions). We also show that MLLMs can benefit from cross-modal transfer, i.e., transfer knowledge from language to multimodal, and from multimodal to language. In addition, we introduce a dataset of Raven IQ test, which diagnoses the nonverbal reasoning capability of MLLMs.
Image as a Foreign Language: BEiT Pretraining for All Vision and Vision-Language Tasks
Aug 31, 2022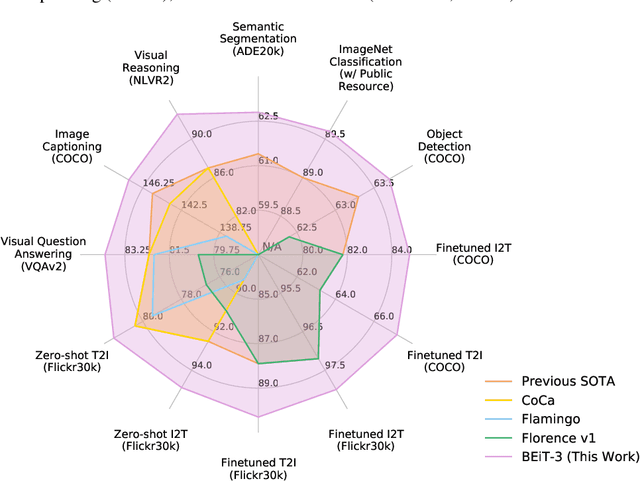
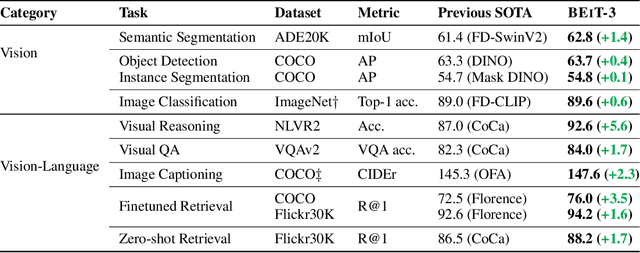
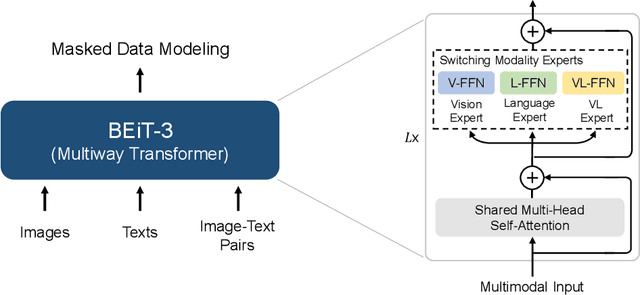

A big convergence of language, vision, and multimodal pretraining is emerging. In this work, we introduce a general-purpose multimodal foundation model BEiT-3, which achieves state-of-the-art transfer performance on both vision and vision-language tasks. Specifically, we advance the big convergence from three aspects: backbone architecture, pretraining task, and model scaling up. We introduce Multiway Transformers for general-purpose modeling, where the modular architecture enables both deep fusion and modality-specific encoding. Based on the shared backbone, we perform masked "language" modeling on images (Imglish), texts (English), and image-text pairs ("parallel sentences") in a unified manner. Experimental results show that BEiT-3 obtains state-of-the-art performance on object detection (COCO), semantic segmentation (ADE20K), image classification (ImageNet), visual reasoning (NLVR2), visual question answering (VQAv2), image captioning (COCO), and cross-modal retrieval (Flickr30K, COCO).
Is High Variance Unavoidable in RL? A Case Study in Continuous Control
Oct 21, 2021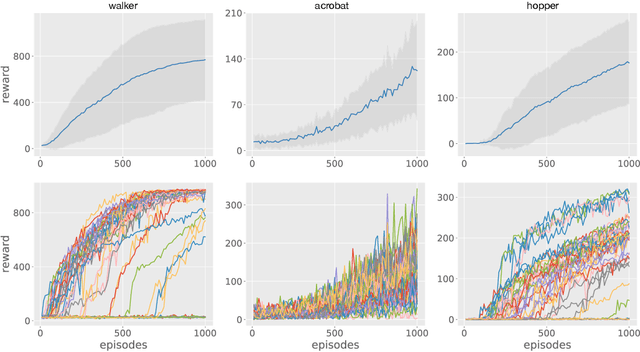
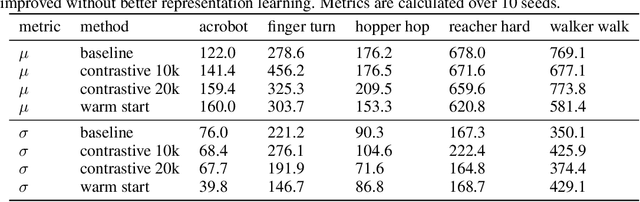
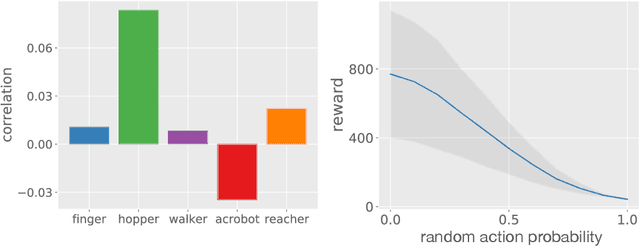
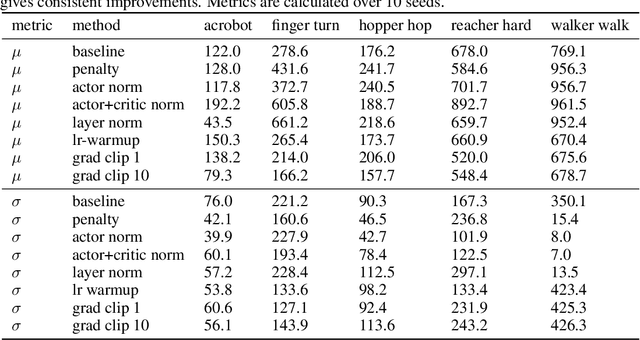
Reinforcement learning (RL) experiments have notoriously high variance, and minor details can have disproportionately large effects on measured outcomes. This is problematic for creating reproducible research and also serves as an obstacle for real-world applications, where safety and predictability are paramount. In this paper, we investigate causes for this perceived instability. To allow for an in-depth analysis, we focus on a specifically popular setup with high variance -- continuous control from pixels with an actor-critic agent. In this setting, we demonstrate that variance mostly arises early in training as a result of poor "outlier" runs, but that weight initialization and initial exploration are not to blame. We show that one cause for early variance is numerical instability which leads to saturating nonlinearities. We investigate several fixes to this issue and find that one particular method is surprisingly effective and simple -- normalizing penultimate features. Addressing the learning instability allows for larger learning rates, and significantly decreases the variance of outcomes. This demonstrates that the perceived variance in RL is not necessarily inherent to the problem definition and may be addressed through simple architectural modifications.
Towards Deeper Deep Reinforcement Learning
Jun 02, 2021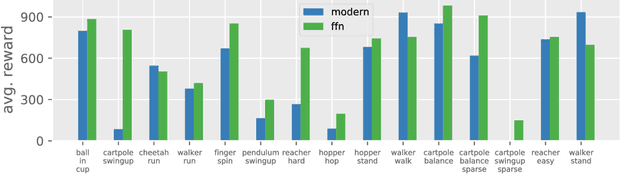
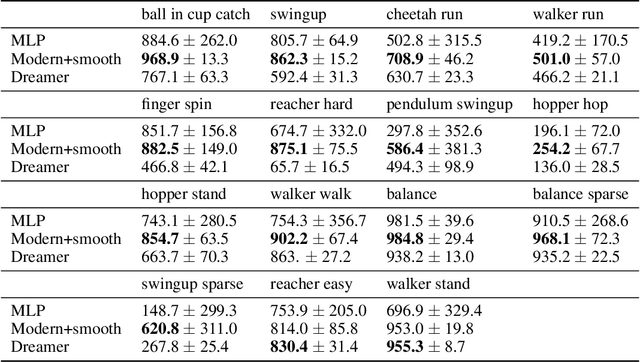
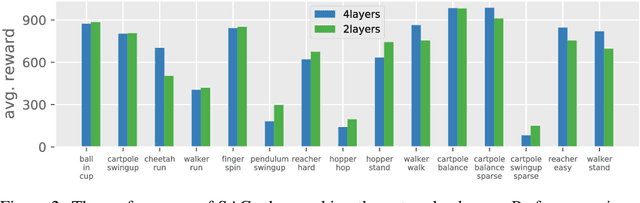
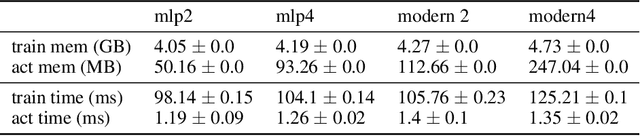
In computer vision and natural language processing, innovations in model architecture that lead to increases in model capacity have reliably translated into gains in performance. In stark contrast with this trend, state-of-the-art reinforcement learning (RL) algorithms often use only small MLPs, and gains in performance typically originate from algorithmic innovations. It is natural to hypothesize that small datasets in RL necessitate simple models to avoid overfitting; however, this hypothesis is untested. In this paper we investigate how RL agents are affected by exchanging the small MLPs with larger modern networks with skip connections and normalization, focusing specifically on soft actor-critic (SAC) algorithms. We verify, empirically, that na\"ively adopting such architectures leads to instabilities and poor performance, likely contributing to the popularity of simple models in practice. However, we show that dataset size is not the limiting factor, and instead argue that intrinsic instability from the actor in SAC taking gradients through the critic is the culprit. We demonstrate that a simple smoothing method can mitigate this issue, which enables stable training with large modern architectures. After smoothing, larger models yield dramatic performance improvements for state-of-the-art agents -- suggesting that more "easy" gains may be had by focusing on model architectures in addition to algorithmic innovations.