 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge$μ_0$: A Scalable 3D Interaction-Trace World Model
Jun 11, 2026World models that capture how actions induce physical change enable scalable robot learning without reliance on embodiment-specific action labels. Pixel-space video models provide broad visual priors but expend model capacity on dense appearance reconstruction, while direct action models require embodiment-specific labels that hinder scalability. We present $μ_0$, a scalable world model based on 3D traces. Rather than predicting dense pixels or directly modeling actions, $μ_0$ forecasts smooth 3D trajectories for salient interaction points such as objects, tools, hands, and contact regions, yielding a compact, embodiment-agnostic motion interface. To enable training from diverse video sources, our TraceExtract system automatically extracts 3D supervision by selecting keypoints, constructing globally aligned traces, and associating motion segments with hierarchical language captions. This TraceExtract supervision pretrains $μ_0$ by combining a pretrained vision-language backbone with a modular trace expert, which represents each query via B-spline control points and predicts future traces. Experiments show that $μ_0$ outperforms baselines in both 2D and 3D trace prediction, including trace prediction models and tokenized VLM methods. Because $μ_0$ is frozen and reusable, it can be paired with action experts for downstream robot embodiments. Despite action-free pretraining, the resulting trace-conditioned policies achieve performance competitive with VLA models pretrained with action supervision, such as $π_0$. These results establish 3D traces as a scalable and transferable representation for cross-embodiment manipulation.
DynaFLIP: Rethinking Robotics Perception via Tri-Modal-Dynamics Guided Representation
May 28, 2026Robot manipulation critically depends on perception that preserves the action-relevant aspects of a scene. Yet most robot learning pipelines are built upon visual encoders pre-trained for static recognition or vision-language alignment, leaving motion understanding to downstream policies. We introduce DynaFLIP, a dynamics-aware multimodal pre-training framework that pushes motion understanding upstream into perception. We construct image-language-3D flow triplets from heterogeneous human and robot videos, and use these triplets as training-time supervision to shape an image-only encoder. Our key idea is to encourage the three modalities to span a small simplex volume in the shared hyperspherical space -- a smaller simplex volume indicating stronger alignment. To avoid the geometric ambiguity and trivial collapse of naive volume minimization, we combine simplex-volume minimization with a cosine regularizer and a contrastive objective. Our analyses show that DynaFLIP focuses on control-relevant regions critical for manipulation. The resulting dynamics-aware representations serve as reusable visual backbones and consistently outperform baselines across diverse downstream policies, including VLAs. We validate this across diverse simulation and real-world setups, with gains reaching +22.5% under out-of-distribution scenarios. Our results suggest that robot generalization improves when visual representations are trained to encode not just what is present, but how the world changes under action.
HumanEgo: Zero-Shot Robot Learning from Minutes of Human Egocentric Videos
May 28, 2026Human egocentric video captures rich manipulation demonstrations without any robot hardware, yet transferring these skills to robots remains challenging due to the embodiment gap between human and robot in both visual appearance and kinematics. We present HumanEgo, a framework that bridges the embodiment gap by lifting each human demonstration to an entity-level representation of hand-object interaction, and training a flow matching policy with dense auxiliary objectives that amplify supervision from every trajectory. HumanEgo is robot-data-free, hardware-agnostic, data-efficient, and zero-shot human-to-robot transferable. With only 30 minutes of human videos per task, HumanEgo achieves 92.5% average success across four real-world tasks (75% with just 15 minutes), outperforms matched-time robot teleoperation by 41%, and robustly transfers zero-shot across novel robots, cameras, and environments. We release HumanEgo as an easy-to-use, open-source framework for learning robot policies directly from human data: https://github.com/TX-Leo/HumanEgo
SE(3)-LIO: Smooth IMU Propagation With Jointly Distributed Poses on SE(3) Manifold for Accurate and Robust LiDAR-Inertial Odometry
Mar 17, 2026In estimating odometry accurately, an inertial measurement unit (IMU) is widely used owing to its high-rate measurements, which can be utilized to obtain motion information through IMU propagation. In this paper, we address the limitations of existing IMU propagation methods in terms of motion prediction and motion compensation. In motion prediction, the existing methods typically represent a 6-DoF pose by separating rotation and translation and propagate them on their respective manifold, so that the rotational variation is not effectively incorporated into translation propagation. During motion compensation, the relative transformation between predicted poses is used to compensate motion-induced distortion in other measurements, while inherent errors in the predicted poses introduce uncertainty in the relative transformation. To tackle these challenges, we represent and propagate the pose on SE(3) manifold, where propagated translation properly accounts for rotational variation. Furthermore, we precisely characterize the relative transformation uncertainty by considering the correlation between predicted poses, and incorporate this uncertainty into the measurement noise during motion compensation. To this end, we propose a LiDAR-inertial odometry (LIO), referred to as SE(3)-LIO, that integrates the proposed IMU propagation and uncertainty-aware motion compensation (UAMC). We validate the effectiveness of SE(3)-LIO on diverse datasets. Our source code and additional material are available at: https://se3-lio.github.io/.
MomaGraph: State-Aware Unified Scene Graphs with Vision-Language Model for Embodied Task Planning
Dec 18, 2025Mobile manipulators in households must both navigate and manipulate. This requires a compact, semantically rich scene representation that captures where objects are, how they function, and which parts are actionable. Scene graphs are a natural choice, yet prior work often separates spatial and functional relations, treats scenes as static snapshots without object states or temporal updates, and overlooks information most relevant for accomplishing the current task. To address these limitations, we introduce MomaGraph, a unified scene representation for embodied agents that integrates spatial-functional relationships and part-level interactive elements. However, advancing such a representation requires both suitable data and rigorous evaluation, which have been largely missing. We thus contribute MomaGraph-Scenes, the first large-scale dataset of richly annotated, task-driven scene graphs in household environments, along with MomaGraph-Bench, a systematic evaluation suite spanning six reasoning capabilities from high-level planning to fine-grained scene understanding. Built upon this foundation, we further develop MomaGraph-R1, a 7B vision-language model trained with reinforcement learning on MomaGraph-Scenes. MomaGraph-R1 predicts task-oriented scene graphs and serves as a zero-shot task planner under a Graph-then-Plan framework. Extensive experiments demonstrate that our model achieves state-of-the-art results among open-source models, reaching 71.6% accuracy on the benchmark (+11.4% over the best baseline), while generalizing across public benchmarks and transferring effectively to real-robot experiments.
Imagine, Verify, Execute: Memory-Guided Agentic Exploration with Vision-Language Models
May 12, 2025
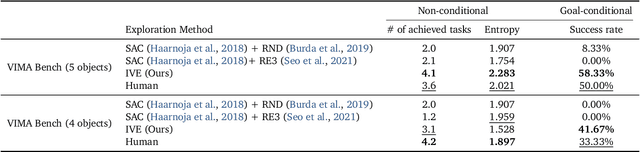


Exploration is essential for general-purpose robotic learning, especially in open-ended environments where dense rewards, explicit goals, or task-specific supervision are scarce. Vision-language models (VLMs), with their semantic reasoning over objects, spatial relations, and potential outcomes, present a compelling foundation for generating high-level exploratory behaviors. However, their outputs are often ungrounded, making it difficult to determine whether imagined transitions are physically feasible or informative. To bridge the gap between imagination and execution, we present IVE (Imagine, Verify, Execute), an agentic exploration framework inspired by human curiosity. Human exploration is often driven by the desire to discover novel scene configurations and to deepen understanding of the environment. Similarly, IVE leverages VLMs to abstract RGB-D observations into semantic scene graphs, imagine novel scenes, predict their physical plausibility, and generate executable skill sequences through action tools. We evaluate IVE in both simulated and real-world tabletop environments. The results show that IVE enables more diverse and meaningful exploration than RL baselines, as evidenced by a 4.1 to 7.8x increase in the entropy of visited states. Moreover, the collected experience supports downstream learning, producing policies that closely match or exceed the performance of those trained on human-collected demonstrations.
Why Are Web AI Agents More Vulnerable Than Standalone LLMs? A Security Analysis
Feb 27, 2025



Recent advancements in Web AI agents have demonstrated remarkable capabilities in addressing complex web navigation tasks. However, emerging research shows that these agents exhibit greater vulnerability compared to standalone Large Language Models (LLMs), despite both being built upon the same safety-aligned models. This discrepancy is particularly concerning given the greater flexibility of Web AI Agent compared to standalone LLMs, which may expose them to a wider range of adversarial user inputs. To build a scaffold that addresses these concerns, this study investigates the underlying factors that contribute to the increased vulnerability of Web AI agents. Notably, this disparity stems from the multifaceted differences between Web AI agents and standalone LLMs, as well as the complex signals - nuances that simple evaluation metrics, such as success rate, often fail to capture. To tackle these challenges, we propose a component-level analysis and a more granular, systematic evaluation framework. Through this fine-grained investigation, we identify three critical factors that amplify the vulnerability of Web AI agents; (1) embedding user goals into the system prompt, (2) multi-step action generation, and (3) observational capabilities. Our findings highlights the pressing need to enhance security and robustness in AI agent design and provide actionable insights for targeted defense strategies.
TRIP: Terrain Traversability Mapping With Risk-Aware Prediction for Enhanced Online Quadrupedal Robot Navigation
Nov 26, 2024



Accurate traversability estimation using an online dense terrain map is crucial for safe navigation in challenging environments like construction and disaster areas. However, traversability estimation for legged robots on rough terrains faces substantial challenges owing to limited terrain information caused by restricted field-of-view, and data occlusion and sparsity. To robustly map traversable regions, we introduce terrain traversability mapping with risk-aware prediction (TRIP). TRIP reconstructs the terrain maps while predicting multi-modal traversability risks, enhancing online autonomous navigation with the following contributions. Firstly, estimating steppability in a spherical projection space allows for addressing data sparsity while accomodating scalable terrain properties. Moreover, the proposed traversability-aware Bayesian generalized kernel (T-BGK)-based inference method enhances terrain completion accuracy and efficiency. Lastly, leveraging the steppability-based Mahalanobis distance contributes to robustness against outliers and dynamic elements, ultimately yielding a static terrain traversability map. As verified in both public and our in-house datasets, our TRIP shows significant performance increases in terms of terrain reconstruction and navigation map. A demo video that demonstrates its feasibility as an integral component within an onboard online autonomous navigation system for quadruped robots is available at https://youtu.be/d7HlqAP4l0c.
Robot Utility Models: General Policies for Zero-Shot Deployment in New Environments
Sep 09, 2024Robot models, particularly those trained with large amounts of data, have recently shown a plethora of real-world manipulation and navigation capabilities. Several independent efforts have shown that given sufficient training data in an environment, robot policies can generalize to demonstrated variations in that environment. However, needing to finetune robot models to every new environment stands in stark contrast to models in language or vision that can be deployed zero-shot for open-world problems. In this work, we present Robot Utility Models (RUMs), a framework for training and deploying zero-shot robot policies that can directly generalize to new environments without any finetuning. To create RUMs efficiently, we develop new tools to quickly collect data for mobile manipulation tasks, integrate such data into a policy with multi-modal imitation learning, and deploy policies on-device on Hello Robot Stretch, a cheap commodity robot, with an external mLLM verifier for retrying. We train five such utility models for opening cabinet doors, opening drawers, picking up napkins, picking up paper bags, and reorienting fallen objects. Our system, on average, achieves 90% success rate in unseen, novel environments interacting with unseen objects. Moreover, the utility models can also succeed in different robot and camera set-ups with no further data, training, or fine-tuning. Primary among our lessons are the importance of training data over training algorithm and policy class, guidance about data scaling, necessity for diverse yet high-quality demonstrations, and a recipe for robot introspection and retrying to improve performance on individual environments. Our code, data, models, hardware designs, as well as our experiment and deployment videos are open sourced and can be found on our project website: https://robotutilitymodels.com
TOSS: Real-time Tracking and Moving Object Segmentation for Static Scene Mapping
Aug 10, 2024



Safe navigation with simultaneous localization and mapping (SLAM) for autonomous robots is crucial in challenging environments. To achieve this goal, detecting moving objects in the surroundings and building a static map are essential. However, existing moving object segmentation methods have been developed separately for each field, making it challenging to perform real-time navigation and precise static map building simultaneously. In this paper, we propose an integrated real-time framework that combines online tracking-based moving object segmentation with static map building. For safe navigation, we introduce a computationally efficient hierarchical association cost matrix to enable real-time moving object segmentation. In the context of precise static mapping, we present a voting-based method, DS-Voting, designed to achieve accurate dynamic object removal and static object recovery by emphasizing their spatio-temporal differences. We evaluate our proposed method quantitatively and qualitatively in the SemanticKITTI dataset and real-world challenging environments. The results demonstrate that dynamic objects can be clearly distinguished and incorporated into static map construction, even in stairs, steep hills, and dense vegetation.