 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHumanoidMimicGen: Data Generation for Loco-Manipulation via Whole-Body Planning
May 26, 2026Imitation learning is a promising approach for training humanoid robots to both walk and manipulate, but it requires a large number of demonstrations, which are time-intensive and difficult to collect via teleoperation. Existing data-generation algorithms can automatically synthesize demonstrations for manipulators, but they are ineffective on humanoids because their high-dimensional composite action spaces involve arms, legs, and torsos. We present HumanoidMimicGen, a method for generating humanoid legged loco-manipulation data. Our method adapts contact-rich whole-body skills from a handful of source demonstrations to new states, generalizing across changes in object pose. By interleaving these single- and dual-arm skills with whole-body locomotion and manipulation planning, the method generates stable, collision-free data across diverse scenes and layouts. To evaluate our approach, we introduce a new simulated loco-manipulation benchmark containing nine diverse tasks that test humanoid loco-manipulation capabilities. There, we demonstrate that HumanoidMimicGen automatically generates large datasets for imitation learning and enables a systematic study of how data generation and policy learning decisions impact model performance. We show that whole-body visuomotor policies co-trained with data generated by HumanoidMimicGen outperform those trained only on real-world data by 20%.
ProImage-Bench: Rubric-Based Evaluation for Professional Image Generation
Dec 13, 2025We study professional image generation, where a model must synthesize information-dense, scientifically precise illustrations from technical descriptions rather than merely produce visually plausible pictures. To quantify the progress, we introduce ProImage-Bench, a rubric-based benchmark that targets biology schematics, engineering/patent drawings, and general scientific diagrams. For 654 figures collected from real textbooks and technical reports, we construct detailed image instructions and a hierarchy of rubrics that decompose correctness into 6,076 criteria and 44,131 binary checks. Rubrics are derived from surrounding text and reference figures using large multimodal models, and are evaluated by an automated LMM-based judge with a principled penalty scheme that aggregates sub-question outcomes into interpretable criterion scores. We benchmark several representative text-to-image models on ProImage-Bench and find that, despite strong open-domain performance, the best base model reaches only 0.791 rubric accuracy and 0.553 criterion score overall, revealing substantial gaps in fine-grained scientific fidelity. Finally, we show that the same rubrics provide actionable supervision: feeding failed checks back into an editing model for iterative refinement boosts a strong generator from 0.653 to 0.865 in rubric accuracy and from 0.388 to 0.697 in criterion score. ProImage-Bench thus offers both a rigorous diagnostic for professional image generation and a scalable signal for improving specification-faithful scientific illustrations.
SHANKS: Simultaneous Hearing and Thinking for Spoken Language Models
Oct 08, 2025



Current large language models (LLMs) and spoken language models (SLMs) begin thinking and taking actions only after the user has finished their turn. This prevents the model from interacting during the user's turn and can lead to high response latency while it waits to think. Consequently, thinking after receiving the full input is not suitable for speech-to-speech interaction, where real-time, low-latency exchange is important. We address this by noting that humans naturally "think while listening." In this paper, we propose SHANKS, a general inference framework that enables SLMs to generate unspoken chain-of-thought reasoning while listening to the user input. SHANKS streams the input speech in fixed-duration chunks and, as soon as a chunk is received, generates unspoken reasoning based on all previous speech and reasoning, while the user continues speaking. SHANKS uses this unspoken reasoning to decide whether to interrupt the user and to make tool calls to complete the task. We demonstrate that SHANKS enhances real-time user-SLM interaction in two scenarios: (1) when the user is presenting a step-by-step solution to a math problem, SHANKS can listen, reason, and interrupt when the user makes a mistake, achieving 37.1% higher interruption accuracy than a baseline that interrupts without thinking; and (2) in a tool-augmented dialogue, SHANKS can complete 56.9% of the tool calls before the user finishes their turn. Overall, SHANKS moves toward models that keep thinking throughout the conversation, not only after a turn ends. Animated illustrations of Shanks can be found at https://d223302.github.io/SHANKS/
Constraint-Preserving Data Generation for Visuomotor Policy Learning
Aug 05, 2025



Large-scale demonstration data has powered key breakthroughs in robot manipulation, but collecting that data remains costly and time-consuming. We present Constraint-Preserving Data Generation (CP-Gen), a method that uses a single expert trajectory to generate robot demonstrations containing novel object geometries and poses. These generated demonstrations are used to train closed-loop visuomotor policies that transfer zero-shot to the real world and generalize across variations in object geometries and poses. Similar to prior work using pose variations for data generation, CP-Gen first decomposes expert demonstrations into free-space motions and robot skills. But unlike those works, we achieve geometry-aware data generation by formulating robot skills as keypoint-trajectory constraints: keypoints on the robot or grasped object must track a reference trajectory defined relative to a task-relevant object. To generate a new demonstration, CP-Gen samples pose and geometry transforms for each task-relevant object, then applies these transforms to the object and its associated keypoints or keypoint trajectories. We optimize robot joint configurations so that the keypoints on the robot or grasped object track the transformed keypoint trajectory, and then motion plan a collision-free path to the first optimized joint configuration. Experiments on 16 simulation tasks and four real-world tasks, featuring multi-stage, non-prehensile and tight-tolerance manipulation, show that policies trained using CP-Gen achieve an average success rate of 77%, outperforming the best baseline that achieves an average of 50%.
ViCrit: A Verifiable Reinforcement Learning Proxy Task for Visual Perception in VLMs
Jun 11, 2025Reinforcement learning (RL) has shown great effectiveness for fine-tuning large language models (LLMs) using tasks that are challenging yet easily verifiable, such as math reasoning or code generation. However, extending this success to visual perception in vision-language models (VLMs) has been impeded by the scarcity of vision-centric tasks that are simultaneously challenging and unambiguously verifiable. To this end, we introduce ViCrit (Visual Caption Hallucination Critic), an RL proxy task that trains VLMs to localize a subtle, synthetic visual hallucination injected into paragraphs of human-written image captions. Starting from a 200-word captions, we inject a single, subtle visual description error-altering a few words on objects, attributes, counts, or spatial relations-and task the model to pinpoint the corrupted span given the image and the modified caption. This formulation preserves the full perceptual difficulty while providing a binary, exact-match reward that is easy to compute and unambiguous. Models trained with the ViCrit Task exhibit substantial gains across a variety of VL benchmarks. Crucially, the improvements transfer beyond natural-image training data to abstract image reasoning and visual math, showing promises of learning to perceive rather than barely memorizing seen objects. To facilitate evaluation, we further introduce ViCrit-Bench, a category-balanced diagnostic benchmark that systematically probes perception errors across diverse image domains and error types. Together, our results demonstrate that fine-grained hallucination criticism is an effective and generalizable objective for enhancing visual perception in VLMs.
What makes Reasoning Models Different? Follow the Reasoning Leader for Efficient Decoding
Jun 08, 2025Large reasoning models (LRMs) achieve strong reasoning performance by emitting long chains of thought. Yet, these verbose traces slow down inference and often drift into unnecessary detail, known as the overthinking phenomenon. To better understand LRMs' behavior, we systematically analyze the token-level misalignment between reasoning and non-reasoning models. While it is expected that their primary difference lies in the stylistic "thinking cues", LRMs uniquely exhibit two pivotal, previously under-explored phenomena: a Global Misalignment Rebound, where their divergence from non-reasoning models persists or even grows as response length increases, and more critically, a Local Misalignment Diminish, where the misalignment concentrates at the "thinking cues" each sentence starts with but rapidly declines in the remaining of the sentence. Motivated by the Local Misalignment Diminish, we propose FoReaL-Decoding, a collaborative fast-slow thinking decoding method for cost-quality trade-off. In FoReaL-Decoding, a Leading model leads the first few tokens for each sentence, and then a weaker draft model completes the following tokens to the end of each sentence. FoReaL-Decoding adopts a stochastic gate to smoothly interpolate between the small and the large model. On four popular math-reasoning benchmarks (AIME24, GPQA-Diamond, MATH500, AMC23), FoReaL-Decoding reduces theoretical FLOPs by 30 to 50% and trims CoT length by up to 40%, while preserving 86 to 100% of model performance. These results establish FoReaL-Decoding as a simple, plug-and-play route to controllable cost-quality trade-offs in reasoning-centric tasks.
Audio-Aware Large Language Models as Judges for Speaking Styles
Jun 06, 2025Audio-aware large language models (ALLMs) can understand the textual and non-textual information in the audio input. In this paper, we explore using ALLMs as an automatic judge to assess the speaking styles of speeches. We use ALLM judges to evaluate the speeches generated by SLMs on two tasks: voice style instruction following and role-playing. The speaking style we consider includes emotion, volume, speaking pace, word emphasis, pitch control, and non-verbal elements. We use four spoken language models (SLMs) to complete the two tasks and use humans and ALLMs to judge the SLMs' responses. We compare two ALLM judges, GPT-4o-audio and Gemini-2.5-pro, with human evaluation results and show that the agreement between Gemini and human judges is comparable to the agreement between human evaluators. These promising results show that ALLMs can be used as a judge to evaluate SLMs. Our results also reveal that current SLMs, even GPT-4o-audio, still have room for improvement in controlling the speaking style and generating natural dialogues.
Point-RFT: Improving Multimodal Reasoning with Visually Grounded Reinforcement Finetuning
May 26, 2025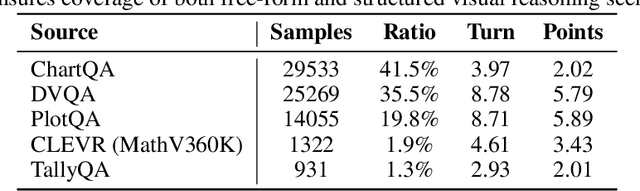
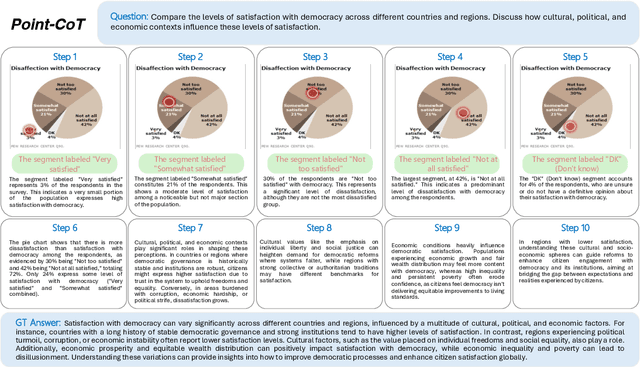
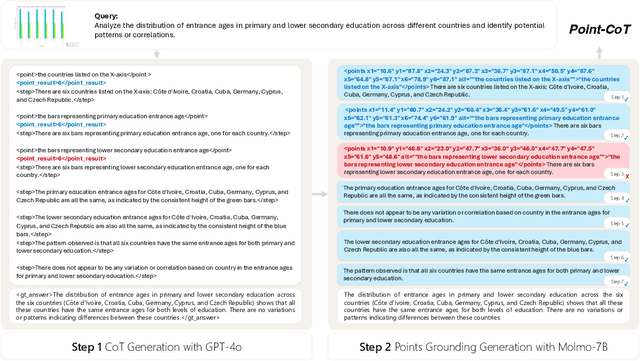
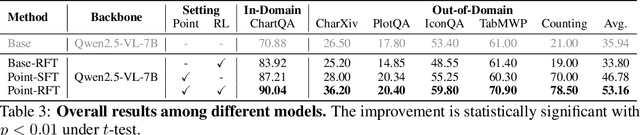
Recent advances in large language models have significantly improved textual reasoning through the effective use of Chain-of-Thought (CoT) and reinforcement learning. However, extending these successes to vision-language tasks remains challenging due to inherent limitations in text-only CoT, such as visual hallucinations and insufficient multimodal integration. In this paper, we introduce Point-RFT, a multimodal reasoning framework explicitly designed to leverage visually grounded CoT reasoning for visual document understanding. Our approach consists of two stages: First, we conduct format finetuning using a curated dataset of 71K diverse visual reasoning problems, each annotated with detailed, step-by-step rationales explicitly grounded to corresponding visual elements. Second, we employ reinforcement finetuning targeting visual document understanding. On ChartQA, our approach improves accuracy from 70.88% (format-finetuned baseline) to 90.04%, surpassing the 83.92% accuracy achieved by reinforcement finetuning relying solely on text-based CoT. The result shows that our grounded CoT is more effective for multimodal reasoning compared with the text-only CoT. Moreover, Point-RFT exhibits superior generalization capability across several out-of-domain visual document reasoning benchmarks, including CharXiv, PlotQA, IconQA, TabMWP, etc., and highlights its potential in complex real-world scenarios.
Sleep-time Compute: Beyond Inference Scaling at Test-time
Apr 17, 2025Scaling test-time compute has emerged as a key ingredient for enabling large language models (LLMs) to solve difficult problems, but comes with high latency and inference cost. We introduce sleep-time compute, which allows models to "think" offline about contexts before queries are presented: by anticipating what queries users might ask and pre-computing useful quantities, we can significantly reduce the compute requirements at test-time. To demonstrate the efficacy of our method, we create modified versions of two reasoning tasks - Stateful GSM-Symbolic and Stateful AIME. We find that sleep-time compute can reduce the amount of test-time compute needed to achieve the same accuracy by ~ 5x on Stateful GSM-Symbolic and Stateful AIME and that by scaling sleep-time compute we can further increase accuracy by up to 13% on Stateful GSM-Symbolic and 18% on Stateful AIME. Furthermore, we introduce Multi-Query GSM-Symbolic, which extends GSM-Symbolic by including multiple related queries per context. By amortizing sleep-time compute across related queries about the same context using Multi-Query GSM-Symbolic, we can decrease the average cost per query by 2.5x. We then conduct additional analysis to understand when sleep-time compute is most effective, finding the predictability of the user query to be well correlated with the efficacy of sleep-time compute. Finally, we conduct a case-study of applying sleep-time compute to a realistic agentic SWE task.
SoTA with Less: MCTS-Guided Sample Selection for Data-Efficient Visual Reasoning Self-Improvement
Apr 10, 2025



In this paper, we present an effective method to enhance visual reasoning with significantly fewer training samples, relying purely on self-improvement with no knowledge distillation. Our key insight is that the difficulty of training data during reinforcement fine-tuning (RFT) is critical. Appropriately challenging samples can substantially boost reasoning capabilities even when the dataset is small. Despite being intuitive, the main challenge remains in accurately quantifying sample difficulty to enable effective data filtering. To this end, we propose a novel way of repurposing Monte Carlo Tree Search (MCTS) to achieve that. Starting from our curated 70k open-source training samples, we introduce an MCTS-based selection method that quantifies sample difficulty based on the number of iterations required by the VLMs to solve each problem. This explicit step-by-step reasoning in MCTS enforces the model to think longer and better identifies samples that are genuinely challenging. We filter and retain 11k samples to perform RFT on Qwen2.5-VL-7B-Instruct, resulting in our final model, ThinkLite-VL. Evaluation results on eight benchmarks show that ThinkLite-VL improves the average performance of Qwen2.5-VL-7B-Instruct by 7%, using only 11k training samples with no knowledge distillation. This significantly outperforms all existing 7B-level reasoning VLMs, and our fairly comparable baselines that use classic selection methods such as accuracy-based filtering. Notably, on MathVista, ThinkLite-VL-7B achieves the SoTA accuracy of 75.1, surpassing Qwen2.5-VL-72B, GPT-4o, and O1. Our code, data, and model are available at https://github.com/si0wang/ThinkLite-VL.