 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Rhythm Modeling for Voice Conversion
Jul 12, 2023
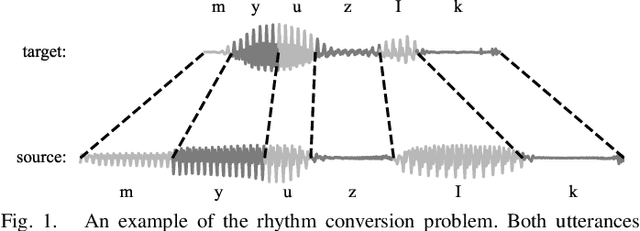

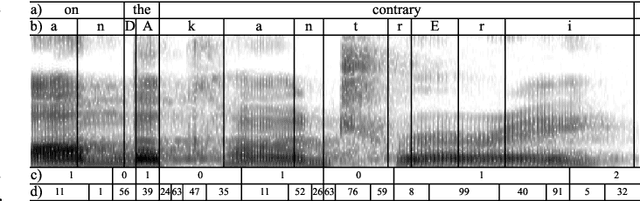
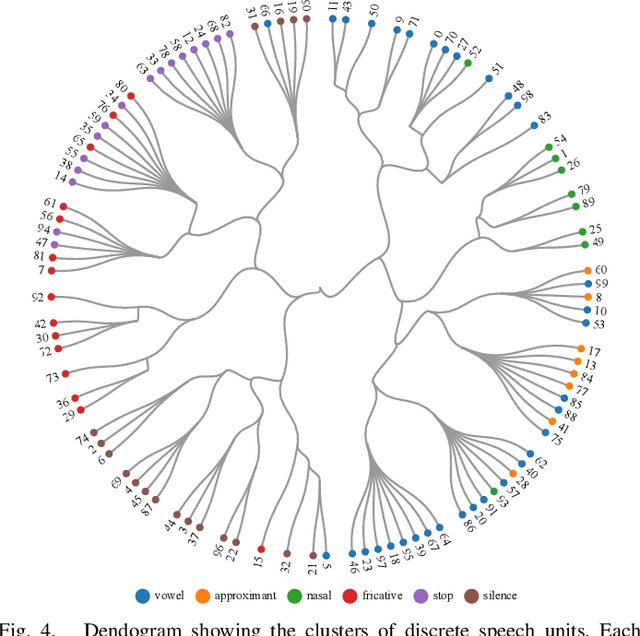
Voice conversion aims to transform source speech into a different target voice. However, typical voice conversion systems do not account for rhythm, which is an important factor in the perception of speaker identity. To bridge this gap, we introduce Urhythmic-an unsupervised method for rhythm conversion that does not require parallel data or text transcriptions. Using self-supervised representations, we first divide source audio into segments approximating sonorants, obstruents, and silences. Then we model rhythm by estimating speaking rate or the duration distribution of each segment type. Finally, we match the target speaking rate or rhythm by time-stretching the speech segments. Experiments show that Urhythmic outperforms existing unsupervised methods in terms of quality and prosody. Code and checkpoints: https://github.com/bshall/urhythmic. Audio demo page: https://ubisoft-laforge.github.io/speech/urhythmic.
Dynamical Graph Echo State Networks with Snapshot Merging for Dissemination Process Classification
Jul 03, 2023The Dissemination Process Classification (DPC) is a popular application of temporal graph classification. The aim of DPC is to classify different spreading patterns of information or pestilence within a community represented by discrete-time temporal graphs. Recently, a reservoir computing-based model named Dynamical Graph Echo State Network (DynGESN) has been proposed for processing temporal graphs with relatively high effectiveness and low computational costs. In this study, we propose a novel model which combines a novel data augmentation strategy called snapshot merging with the DynGESN for dealing with DPC tasks. In our model, the snapshot merging strategy is designed for forming new snapshots by merging neighboring snapshots over time, and then multiple reservoir encoders are set for capturing spatiotemporal features from merged snapshots. After those, the logistic regression is adopted for decoding the sum-pooled embeddings into the classification results. Experimental results on six benchmark DPC datasets show that our proposed model has better classification performances than the DynGESN and several kernel-based models.
MoVie: Visual Model-Based Policy Adaptation for View Generalization
Jul 03, 2023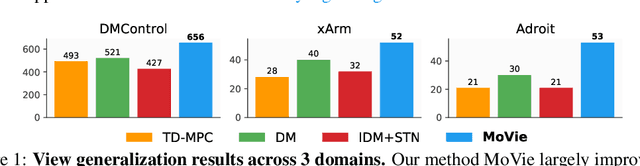
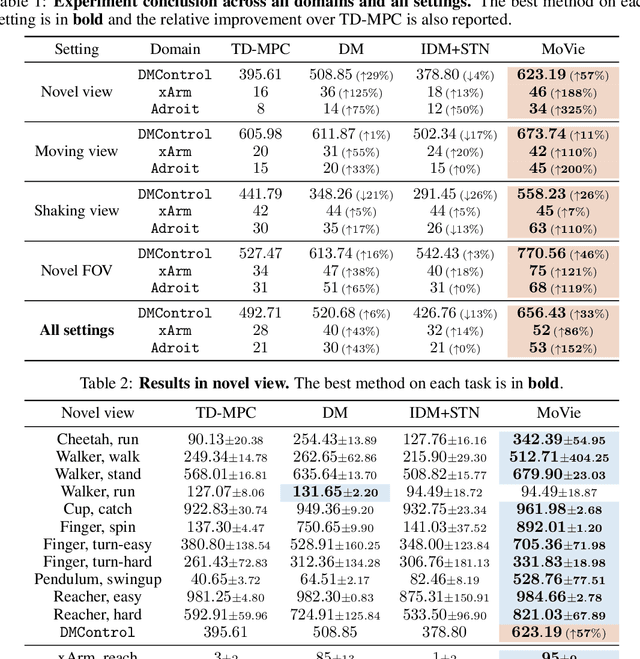
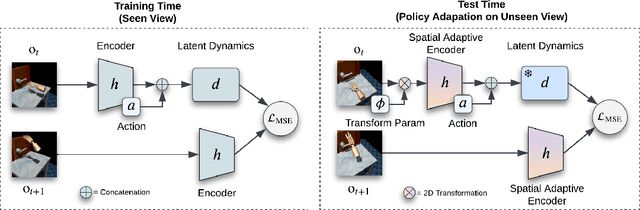
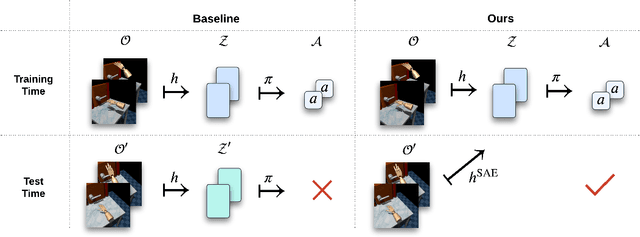
Visual Reinforcement Learning (RL) agents trained on limited views face significant challenges in generalizing their learned abilities to unseen views. This inherent difficulty is known as the problem of $\textit{view generalization}$. In this work, we systematically categorize this fundamental problem into four distinct and highly challenging scenarios that closely resemble real-world situations. Subsequently, we propose a straightforward yet effective approach to enable successful adaptation of visual $\textbf{Mo}$del-based policies for $\textbf{Vie}$w generalization ($\textbf{MoVie}$) during test time, without any need for explicit reward signals and any modification during training time. Our method demonstrates substantial advancements across all four scenarios encompassing a total of $\textbf{18}$ tasks sourced from DMControl, xArm, and Adroit, with a relative improvement of $\mathbf{33}$%, $\mathbf{86}$%, and $\mathbf{152}$% respectively. The superior results highlight the immense potential of our approach for real-world robotics applications. Videos are available at https://yangsizhe.github.io/MoVie/ .
Stable Real-Time Feedback Control of a Pneumatic Soft Robot
Apr 09, 2023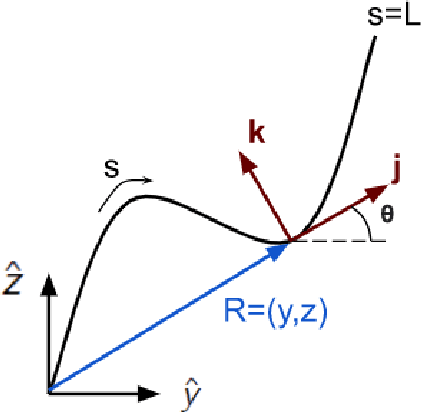
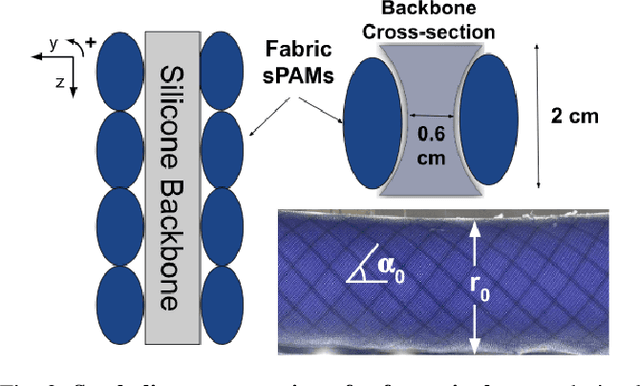
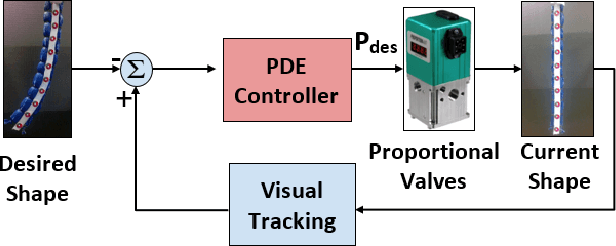
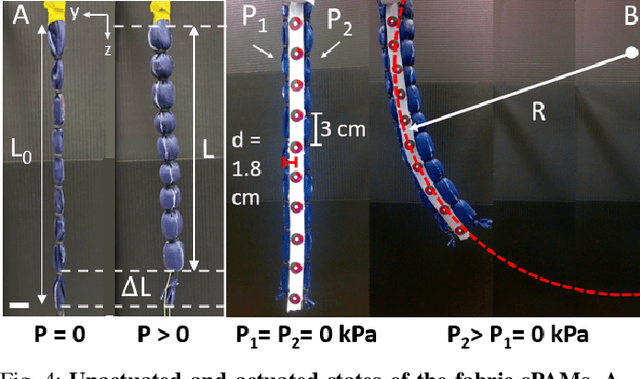
Soft actuators offer compliant and safe interaction with an unstructured environment compared to their rigid counterparts. However, control of these systems is often challenging because they are inherently under-actuated, have infinite degrees of freedom (DoF), and their mechanical properties can change by unknown external loads. Existing works mainly relied on discretization and reduction, suffering from either low accuracy or high computational cost for real-time control purposes. Recently, we presented an infinite-dimensional feedback controller for soft manipulators modeled by partial differential equations (PDEs) based on the Cosserat rod theory. In this study, we examine how to implement this controller in real-time using only a limited number of actuators. To do so, we formulate a convex quadratic programming problem that tunes the feedback gains of the controller in real time such that it becomes realizable by the actuators. We evaluated the controller's performance through experiments on a physical soft robot capable of planar motions and show that the actual controller implemented by the finite-dimensional actuators still preserves the stabilizing property of the desired infinite-dimensional controller. This research fills the gap between the infinite-dimensional control design and finite-dimensional actuation in practice and suggests a promising direction for exploring PDE-based control design for soft robots.
GRAINS: Proximity Sensing of Objects in Granular Materials
Jul 18, 2023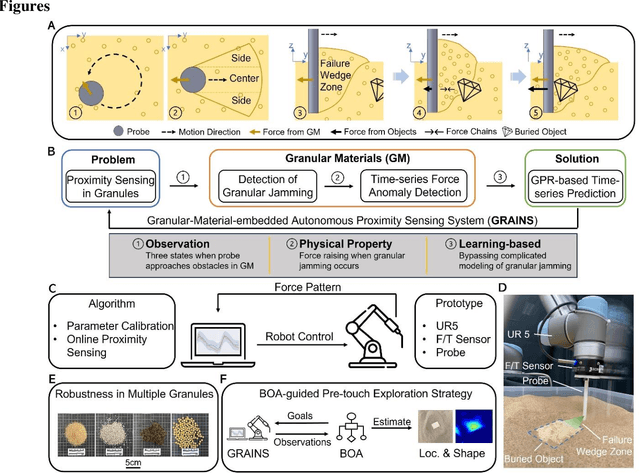
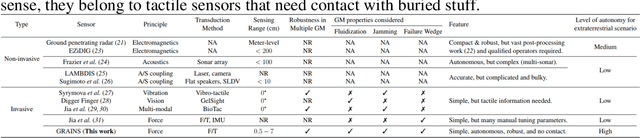
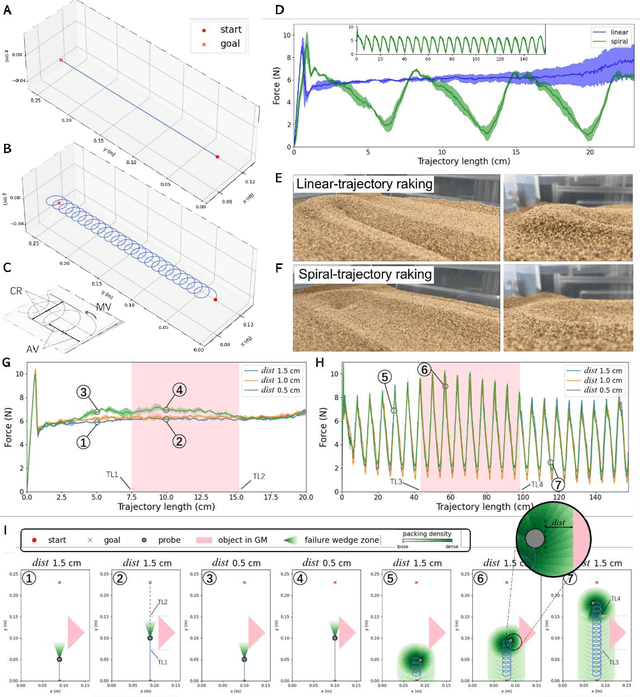
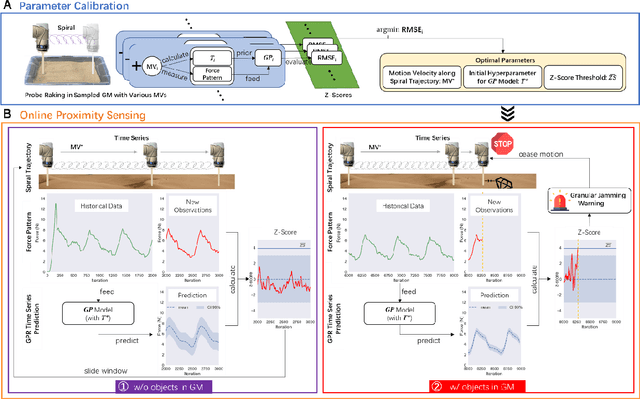
Proximity sensing detects an object's presence without contact. However, research has rarely explored proximity sensing in granular materials (GM) due to GM's lack of visual and complex properties. In this paper, we propose a granular-material-embedded autonomous proximity sensing system (GRAINS) based on three granular phenomena (fluidization, jamming, and failure wedge zone). GRAINS can automatically sense buried objects beneath GM in real-time manner (at least ~20 hertz) and perceive them 0.5 ~ 7 centimeters ahead in different granules without the use of vision or touch. We introduce a new spiral trajectory for the probe raking in GM, combining linear and circular motions, inspired by a common granular fluidization technique. Based on the observation of force-raising when granular jamming occurs in the failure wedge zone in front of the probe during its raking, we employ Gaussian process regression to constantly learn and predict the force patterns and detect the force anomaly resulting from granular jamming to identify the proximity sensing of buried objects. Finally, we apply GRAINS to a Bayesian-optimization-algorithm-guided exploration strategy to successfully localize underground objects and outline their distribution using proximity sensing without contact or digging. This work offers a simple yet reliable method with potential for safe operation in building habitation infrastructure on an alien planet without human intervention.
TableGPT: Towards Unifying Tables, Nature Language and Commands into One GPT
Jul 18, 2023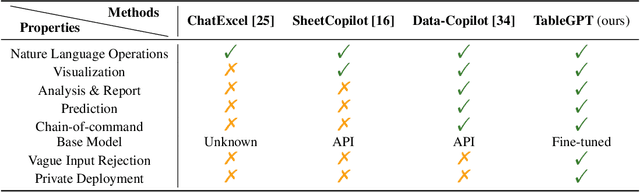
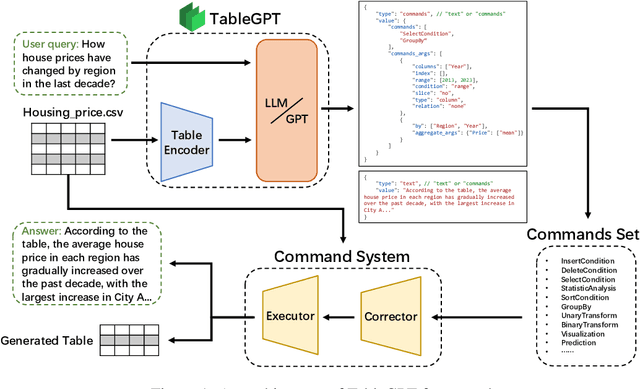
Tables are prevalent in real-world databases, requiring significant time and effort for humans to analyze and manipulate. The advancements in large language models (LLMs) have made it possible to interact with tables using natural language input, bringing this capability closer to reality. In this paper, we present TableGPT, a unified fine-tuned framework that enables LLMs to understand and operate on tables using external functional commands. It introduces the capability to seamlessly interact with tables, enabling a wide range of functionalities such as question answering, data manipulation (e.g., insert, delete, query, and modify operations), data visualization, analysis report generation, and automated prediction. TableGPT aims to provide convenience and accessibility to users by empowering them to effortlessly leverage tabular data. At the core of TableGPT lies the novel concept of global tabular representations, which empowers LLMs to gain a comprehensive understanding of the entire table beyond meta-information. By jointly training LLMs on both table and text modalities, TableGPT achieves a deep understanding of tabular data and the ability to perform complex operations on tables through chain-of-command instructions. Importantly, TableGPT offers the advantage of being a self-contained system rather than relying on external API interfaces. Moreover, it supports efficient data process flow, query rejection (when appropriate) and private deployment, enabling faster domain data fine-tuning and ensuring data privacy, which enhances the framework's adaptability to specific use cases.
Multimodal LLMs for health grounded in individual-specific data
Jul 18, 2023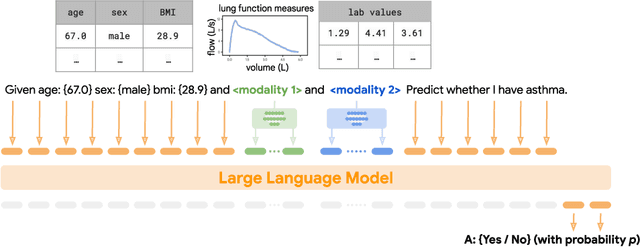
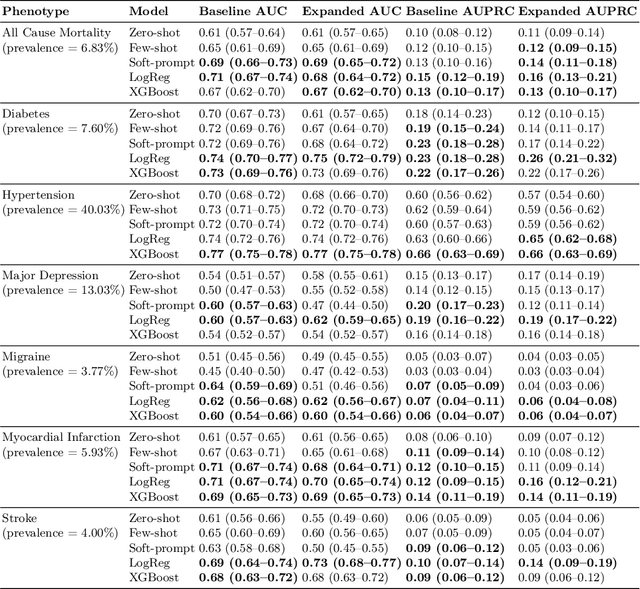
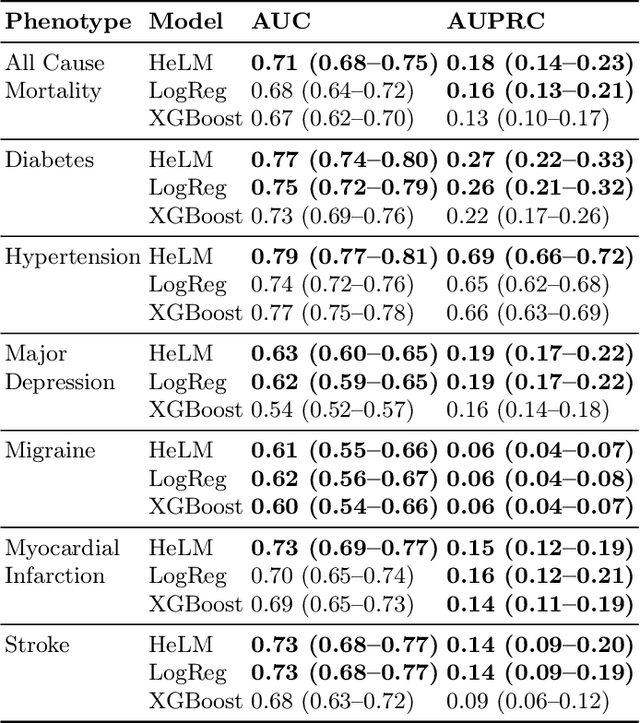
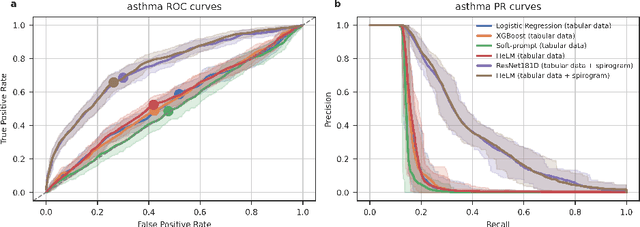
Foundation large language models (LLMs) have shown an impressive ability to solve tasks across a wide range of fields including health. To effectively solve personalized health tasks, LLMs need the ability to ingest a diversity of data modalities that are relevant to an individual's health status. In this paper, we take a step towards creating multimodal LLMs for health that are grounded in individual-specific data by developing a framework (HeLM: Health Large Language Model for Multimodal Understanding) that enables LLMs to use high-dimensional clinical modalities to estimate underlying disease risk. HeLM encodes complex data modalities by learning an encoder that maps them into the LLM's token embedding space and for simple modalities like tabular data by serializing the data into text. Using data from the UK Biobank, we show that HeLM can effectively use demographic and clinical features in addition to high-dimensional time-series data to estimate disease risk. For example, HeLM achieves an AUROC of 0.75 for asthma prediction when combining tabular and spirogram data modalities compared with 0.49 when only using tabular data. Overall, we find that HeLM outperforms or performs at parity with classical machine learning approaches across a selection of eight binary traits. Furthermore, we investigate the downstream uses of this model such as its generalizability to out-of-distribution traits and its ability to power conversations around individual health and wellness.
Multi-Stage Cable Routing through Hierarchical Imitation Learning
Jul 18, 2023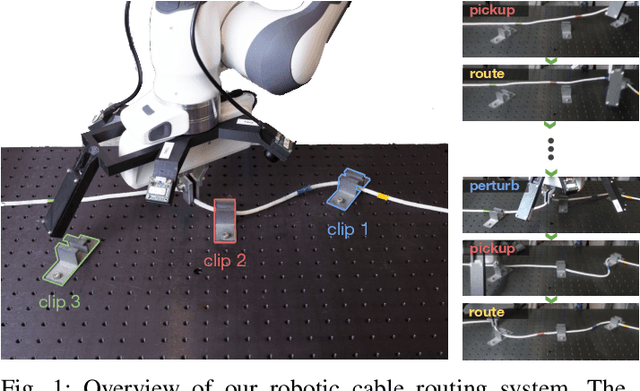
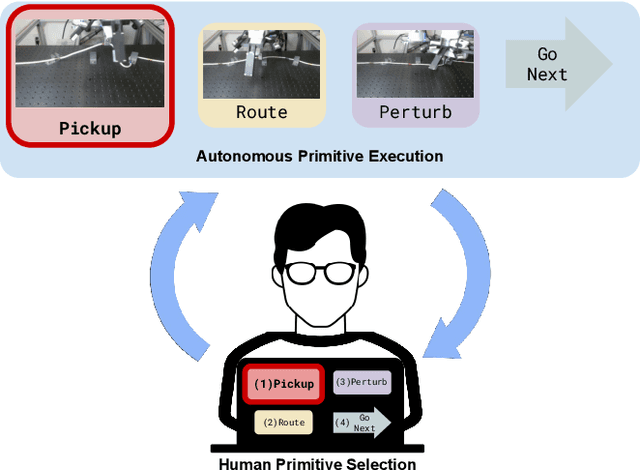
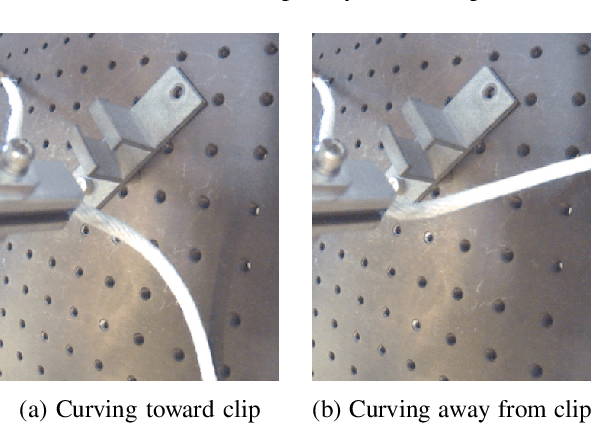
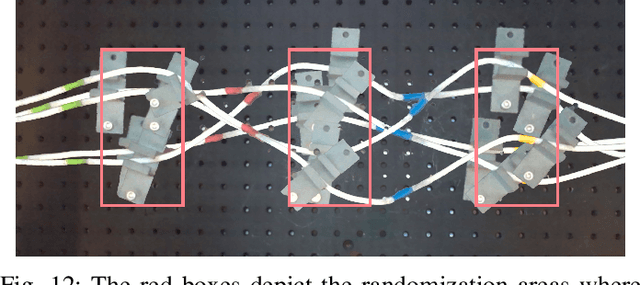
We study the problem of learning to perform multi-stage robotic manipulation tasks, with applications to cable routing, where the robot must route a cable through a series of clips. This setting presents challenges representative of complex multi-stage robotic manipulation scenarios: handling deformable objects, closing the loop on visual perception, and handling extended behaviors consisting of multiple steps that must be executed successfully to complete the entire task. In such settings, learning individual primitives for each stage that succeed with a high enough rate to perform a complete temporally extended task is impractical: if each stage must be completed successfully and has a non-negligible probability of failure, the likelihood of successful completion of the entire task becomes negligible. Therefore, successful controllers for such multi-stage tasks must be able to recover from failure and compensate for imperfections in low-level controllers by smartly choosing which controllers to trigger at any given time, retrying, or taking corrective action as needed. To this end, we describe an imitation learning system that uses vision-based policies trained from demonstrations at both the lower (motor control) and the upper (sequencing) level, present a system for instantiating this method to learn the cable routing task, and perform evaluations showing great performance in generalizing to very challenging clip placement variations. Supplementary videos, datasets, and code can be found at https://sites.google.com/view/cablerouting.
CertPri: Certifiable Prioritization for Deep Neural Networks via Movement Cost in Feature Space
Jul 18, 2023
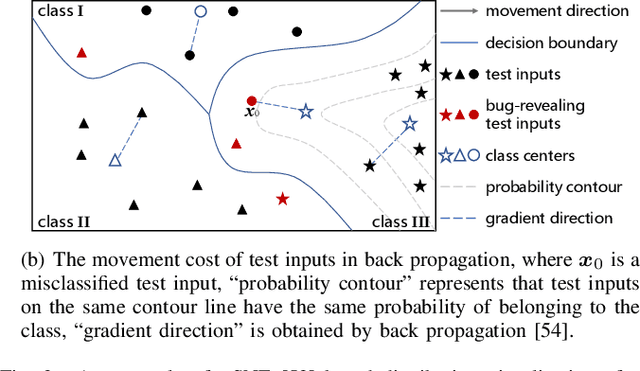
Deep neural networks (DNNs) have demonstrated their outperformance in various software systems, but also exhibit misbehavior and even result in irreversible disasters. Therefore, it is crucial to identify the misbehavior of DNN-based software and improve DNNs' quality. Test input prioritization is one of the most appealing ways to guarantee DNNs' quality, which prioritizes test inputs so that more bug-revealing inputs can be identified earlier with limited time and manual labeling efforts. However, the existing prioritization methods are still limited from three aspects: certifiability, effectiveness, and generalizability. To overcome the challenges, we propose CertPri, a test input prioritization technique designed based on a movement cost perspective of test inputs in DNNs' feature space. CertPri differs from previous works in three key aspects: (1) certifiable: it provides a formal robustness guarantee for the movement cost; (2) effective: it leverages formally guaranteed movement costs to identify malicious bug-revealing inputs; and (3) generic: it can be applied to various tasks, data, models, and scenarios. Extensive evaluations across 2 tasks (i.e., classification and regression), 6 data forms, 4 model structures, and 2 scenarios (i.e., white-box and black-box) demonstrate CertPri's superior performance. For instance, it significantly improves 53.97% prioritization effectiveness on average compared with baselines. Its robustness and generalizability are 1.41~2.00 times and 1.33~3.39 times that of baselines on average, respectively.
Distilling Coarse-to-Fine Semantic Matching Knowledge for Weakly Supervised 3D Visual Grounding
Jul 18, 2023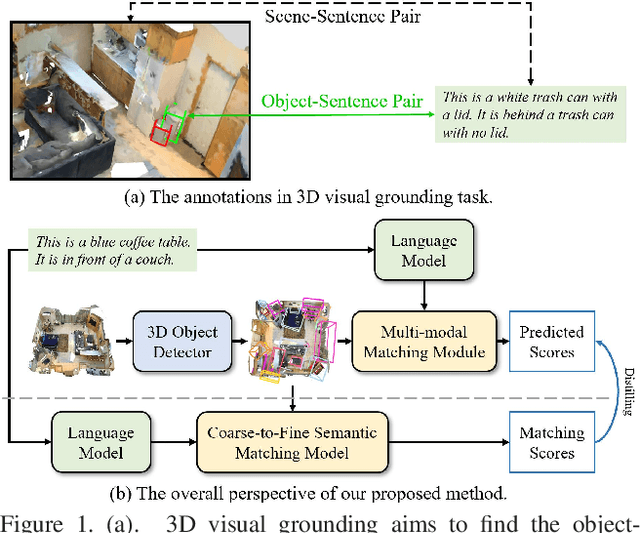
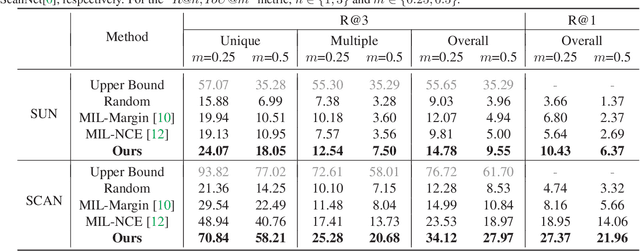
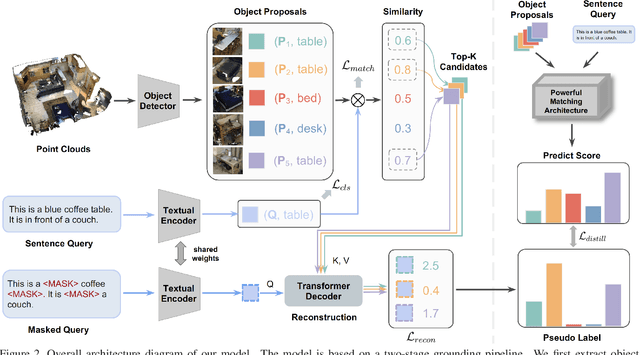

3D visual grounding involves finding a target object in a 3D scene that corresponds to a given sentence query. Although many approaches have been proposed and achieved impressive performance, they all require dense object-sentence pair annotations in 3D point clouds, which are both time-consuming and expensive. To address the problem that fine-grained annotated data is difficult to obtain, we propose to leverage weakly supervised annotations to learn the 3D visual grounding model, i.e., only coarse scene-sentence correspondences are used to learn object-sentence links. To accomplish this, we design a novel semantic matching model that analyzes the semantic similarity between object proposals and sentences in a coarse-to-fine manner. Specifically, we first extract object proposals and coarsely select the top-K candidates based on feature and class similarity matrices. Next, we reconstruct the masked keywords of the sentence using each candidate one by one, and the reconstructed accuracy finely reflects the semantic similarity of each candidate to the query. Additionally, we distill the coarse-to-fine semantic matching knowledge into a typical two-stage 3D visual grounding model, which reduces inference costs and improves performance by taking full advantage of the well-studied structure of the existing architectures. We conduct extensive experiments on ScanRefer, Nr3D, and Sr3D, which demonstrate the effectiveness of our proposed method.