 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIR-SIM: A Lightweight Skill-Native Simulator for Navigation, Learning, and Benchmarking
Jun 07, 2026Simulation plays a key role in automated robotics research supported by large language models (LLMs). However, existing simulators often require custom code or complex interfaces, creating a barrier to rapid prototyping and automated algorithm development. To this end, we propose the Intelligent Robot Simulator (IR-SIM), a lightweight skill-native navigation simulator designed for rapid scenario construction, benchmarking, and robot learning. In IR-SIM, scenarios are entirely defined by YAML configuration files that specify mobile robot kinematics, geometric collision checking, LiDAR sensing, visualization, and behavior modules. This design makes robotic simulation fully describable and reproducible, allowing scenarios to be generated and modified from text prompts through the proposed IR-SIM agent skills. The resulting scenarios can be used for automated benchmarking of navigation algorithms and for automated generation of training data for learning methods. Furthermore, IR-SIM provides bridges to high fidelity simulators and real world deployment, allowing users to validate their algorithms in more realistic settings after prototyping without extra coding. The experiments showcase the convenience and versatility of IR-SIM in multiple tasks: constructing navigation scenarios from natural language, training a collision avoidance policy, benchmarking social navigation policies, and bridging to high fidelity simulators and real world deployment. The project website is available at https://github.com/hanruihua/ir-sim.
DreamAvoid: Critical-Phase Test-Time Dreaming to Avoid Failures in VLA Policies
May 12, 2026Vision-Language-Action (VLA) models are often brittle in fine-grained manipulation, where minor action errors during the critical phases can rapidly escalate into irrecoverable failures. Since existing VLA models rely predominantly on successful demonstrations for training, they lack an explicit awareness of failure during these critical phases. To address this, we propose DreamAvoid, a critical-phase test-time dreaming framework that enables VLA models to anticipate and avoid failures. We also introduce an autonomous boundary learning paradigm to refine the system's understanding of the subtle boundary between success and failure. Specifically, we (1) utilize a Dream Trigger to determine whether the execution has entered a critical phase, (2) sample multiple candidate action chunks from the VLA via an Action Proposer, and (3) employ a Dream Evaluator, jointly trained on mixed data (success, failure, and boundary cases), to "dream" the short-horizon futures corresponding to the candidate actions, evaluate their values, and select the optimal action. We conduct extensive evaluations on real-world manipulation tasks and simulation benchmarks. The results demonstrate that DreamAvoid can effectively avoid failures, thereby improving the overall task success rate. Our code is available at https://github.com/XianzheFan/DreamAvoid.
Agentic Self-Evolutionary Replanning for Embodied Navigation
Mar 03, 2026Failure is inevitable for embodied navigation in complex environments. To enhance the resilience, replanning (RP) is a viable option, where the robot is allowed to fail, but is capable of adjusting plan until success. However, existing RP approaches freeze the ego action model and miss the opportunities to explore better plans by upgrading the robot itself. To address this limitation, we propose Self-Evolutionary RePlanning, or SERP for short, which leads to a paradigm shift from frozen models towards evolving models by run-time learning from recent experiences. In contrast to existing model evolution approaches that often get stuck at predefined static parameters, we introduce agentic self-evolving action model that uses in-context learning with auto-differentiation (ILAD) for adaptive function adjustment and global parameter reset. To achieve token-efficient replanning for SERP, we also propose graph chain-of-thought (GCOT) replanning with large language model (LLM) inference over distilled graphs. Extensive simulation and real-world experiments demonstrate that SERP achieves higher success rate with lower token expenditure over various benchmarks, validating its superior robustness and efficiency across diverse environments.
A Haptic-Based Proximity Sensing System for Buried Object in Granular Material
Nov 26, 2024



The proximity perception of objects in granular materials is significant, especially for applications like minesweeping. However, due to particles' opacity and complex properties, existing proximity sensors suffer from high costs from sophisticated hardware and high user-cost from unintuitive results. In this paper, we propose a simple yet effective proximity sensing system for underground stuff based on the haptic feedback of the sensor-granules interaction. We study and employ the unique characteristic of particles -- failure wedge zone, and combine the machine learning method -- Gaussian process regression, to identify the force signal changes induced by the proximity of objects, so as to achieve near-field perception. Furthermore, we design a novel trajectory to control the probe searching in granules for a wide range of perception. Also, our proximity sensing system can adaptively determine optimal parameters for robustness operation in different particles. Experiments demonstrate our system can perceive underground objects over 0.5 to 7 cm in advance among various materials.
MPCOM: Robotic Data Gathering with Radio Mapping and Model Predictive Communication
Apr 16, 2024Robotic data gathering (RDG) is an emerging paradigm that navigates a robot to harvest data from remote sensors. However, motion planning in this paradigm needs to maximize the RDG efficiency instead of the navigation efficiency, for which the existing motion planning methods become inefficient, as they plan robot trajectories merely according to motion factors. This paper proposes radio map guided model predictive communication (MPCOM), which navigates the robot with both grid and radio maps for shape-aware collision avoidance and communication-aware trajectory generation in a dynamic environment. The proposed MPCOM is able to trade off the time spent on reaching goal, avoiding collision, and improving communication. MPCOM captures high-order signal propagation characteristics using radio maps and incorporates the map-guided communication regularizer to the motion planning block. Experiments in IRSIM and CARLA simulators show that the proposed MPCOM outperforms other benchmarks in both LOS and NLOS cases. Real-world testing based on car-like robots is also provided to demonstrate the effectiveness of MPCOM in indoor environments.
NeuPAN: Direct Point Robot Navigation with End-to-End Model-based Learning
Mar 11, 2024



Navigating a nonholonomic robot in a cluttered environment requires extremely accurate perception and locomotion for collision avoidance. This paper presents NeuPAN: a real-time, highly-accurate, map-free, robot-agnostic, and environment-invariant robot navigation solution. Leveraging a tightly-coupled perception-locomotion framework, NeuPAN has two key innovations compared to existing approaches: 1) it directly maps raw points to a learned multi-frame distance space, avoiding error propagation from perception to control; 2) it is interpretable from an end-to-end model-based learning perspective, enabling provable convergence. The crux of NeuPAN is to solve a high-dimensional end-to-end mathematical model with various point-level constraints using the plug-and-play (PnP) proximal alternating-minimization network (PAN) with neurons in the loop. This allows NeuPAN to generate real-time, end-to-end, physically-interpretable motions directly from point clouds, which seamlessly integrates data- and knowledge-engines, where its network parameters are adjusted via back propagation. We evaluate NeuPAN on car-like robot, wheel-legged robot, and passenger autonomous vehicle, in both simulated and real-world environments. Experiments demonstrate that NeuPAN outperforms various benchmarks, in terms of accuracy, efficiency, robustness, and generalization capability across various environments, including the cluttered sandbox, office, corridor, and parking lot. We show that NeuPAN works well in unstructured environments with arbitrary-shape undetectable objects, making impassable ways passable.
Seamless Virtual Reality with Integrated Synchronizer and Synthesizer for Autonomous Driving
Mar 06, 2024Virtual reality (VR) is a promising data engine for autonomous driving (AD). However, data fidelity in this paradigm is often degraded by VR inconsistency, for which the existing VR approaches become ineffective, as they ignore the inter-dependency between low-level VR synchronizer designs (i.e., data collector) and high-level VR synthesizer designs (i.e., data processor). This paper presents a seamless virtual reality SVR platform for AD, which mitigates such inconsistency, enabling VR agents to interact with each other in a shared symbiotic world. The crux to SVR is an integrated synchronizer and synthesizer IS2 design, which consists of a drift-aware lidar-inertial synchronizer for VR colocation and a motion-aware deep visual synthesis network for augmented reality image generation. We implement SVR on car-like robots in two sandbox platforms, achieving a cm-level VR colocalization accuracy and 3.2% VR image deviation, thereby avoiding missed collisions or model clippings. Experiments show that the proposed SVR reduces the intervention times, missed turns, and failure rates compared to other benchmarks. The SVR-trained neural network can handle unseen situations in real-world environments, by leveraging its knowledge learnt from the VR space.
OA-ECBVC: A Cooperative Collision-free Encirclement and Capture Approach in Cluttered Environments
Dec 03, 2023This article investigates the practical scenarios of chasing an adversarial evader in an unbounded environment with cluttered obstacles. We propose a Voronoi-based decentralized algorithm for multiple pursuers to encircle and capture the evader by reacting to collisions. An efficient approach is presented for constructing an obstacle-aware evader-centered bounded Voronoi cell (OA-ECBVC), which strictly ensures collision avoidance in various obstacle scenarios when pursuing the evader. The evader can be efficiently enclosed in a convex hull given random initial configurations. Furthermore, to cooperatively capture the evader, each pursuer continually compresses the boundary of its OA-ECBVC to quickly reduce the movement space of the evader while maintaining encirclement. Our OA-ECBVC algorithm is validated in various simulated environments with different dynamic systems of robots. Real-time performance of resisting uncertainties shows the superior reliability of our method for deployment on multiple robot platforms.
Edge Accelerated Robot Navigation with Hierarchical Motion Planning
Nov 15, 2023



Low-cost autonomous robots suffer from limited onboard computing power, resulting in excessive computation time when navigating in cluttered environments. This paper presents Edge Accelerated Robot Navigation, or EARN for short, to achieve real-time collision avoidance by adopting hierarchical motion planning (HMP). In contrast to existing local or edge motion planning solutions that ignore the interdependency between low-level motion planning and high-level resource allocation, EARN adopts model predictive switching (MPS) that maximizes the expected switching gain w.r.t. robot states and actions under computation and communication resource constraints. As such, each robot can dynamically switch between a point-mass motion planner executed locally to guarantee safety (e.g., path-following) and a full-shape motion planner executed non-locally to guarantee efficiency (e.g., overtaking). The crux to EARN is a two-time scale integrated decision-planning algorithm based on bilevel mixed-integer optimization, and a fast conditional collision avoidance algorithm based on penalty dual decomposition. We validate the performance of EARN in indoor simulation, outdoor simulation, and real-world environments. Experiments show that EARN achieves significantly smaller navigation time and collision ratios than state-of-the-art navigation approaches.
GRAINS: Proximity Sensing of Objects in Granular Materials
Jul 18, 2023

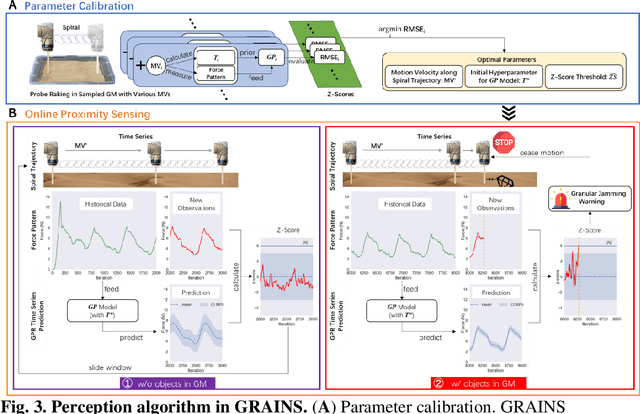

Proximity sensing detects an object's presence without contact. However, research has rarely explored proximity sensing in granular materials (GM) due to GM's lack of visual and complex properties. In this paper, we propose a granular-material-embedded autonomous proximity sensing system (GRAINS) based on three granular phenomena (fluidization, jamming, and failure wedge zone). GRAINS can automatically sense buried objects beneath GM in real-time manner (at least ~20 hertz) and perceive them 0.5 ~ 7 centimeters ahead in different granules without the use of vision or touch. We introduce a new spiral trajectory for the probe raking in GM, combining linear and circular motions, inspired by a common granular fluidization technique. Based on the observation of force-raising when granular jamming occurs in the failure wedge zone in front of the probe during its raking, we employ Gaussian process regression to constantly learn and predict the force patterns and detect the force anomaly resulting from granular jamming to identify the proximity sensing of buried objects. Finally, we apply GRAINS to a Bayesian-optimization-algorithm-guided exploration strategy to successfully localize underground objects and outline their distribution using proximity sensing without contact or digging. This work offers a simple yet reliable method with potential for safe operation in building habitation infrastructure on an alien planet without human intervention.