 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForce-Aware Autonomous Robotic Surgery
Jan 20, 2025



This work demonstrates the benefits of using tool-tissue interaction forces in the design of autonomous systems in robot-assisted surgery (RAS). Autonomous systems in surgery must manipulate tissues of different stiffness levels and hence should apply different levels of forces accordingly. We hypothesize that this ability is enabled by using force measurements as input to policies learned from human demonstrations. To test this hypothesis, we use Action-Chunking Transformers (ACT) to train two policies through imitation learning for automated tissue retraction with the da Vinci Research Kit (dVRK). To quantify the effects of using tool-tissue interaction force data, we trained a "no force policy" that uses the vision and robot kinematic data, and compared it to a "force policy" that uses force, vision and robot kinematic data. When tested on a previously seen tissue sample, the force policy is 3 times more successful in autonomously performing the task compared with the no force policy. In addition, the force policy is more gentle with the tissue compared with the no force policy, exerting on average 62% less force on the tissue. When tested on a previously unseen tissue sample, the force policy is 3.5 times more successful in autonomously performing the task, exerting an order of magnitude less forces on the tissue, compared with the no force policy. These results open the door to design force-aware autonomous systems that can meet the surgical guidelines for tissue handling, especially using the newly released RAS systems with force feedback capabilities such as the da Vinci 5.
RoboCrowd: Scaling Robot Data Collection through Crowdsourcing
Nov 04, 2024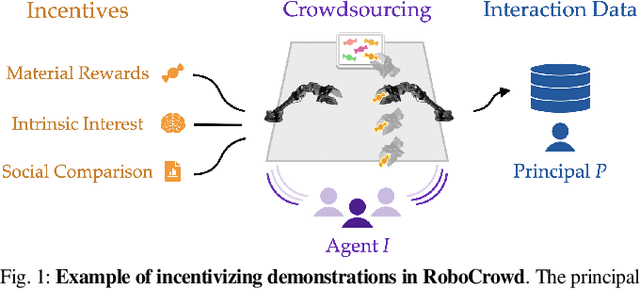
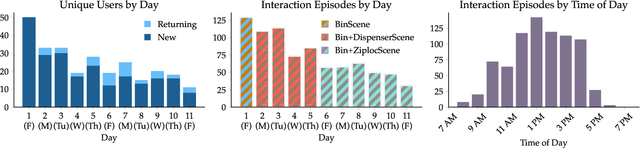
In recent years, imitation learning from large-scale human demonstrations has emerged as a promising paradigm for training robot policies. However, the burden of collecting large quantities of human demonstrations is significant in terms of collection time and the need for access to expert operators. We introduce a new data collection paradigm, RoboCrowd, which distributes the workload by utilizing crowdsourcing principles and incentive design. RoboCrowd helps enable scalable data collection and facilitates more efficient learning of robot policies. We build RoboCrowd on top of ALOHA (Zhao et al. 2023) -- a bimanual platform that supports data collection via puppeteering -- to explore the design space for crowdsourcing in-person demonstrations in a public environment. We propose three classes of incentive mechanisms to appeal to users' varying sources of motivation for interacting with the system: material rewards, intrinsic interest, and social comparison. We instantiate these incentives through tasks that include physical rewards, engaging or challenging manipulations, as well as gamification elements such as a leaderboard. We conduct a large-scale, two-week field experiment in which the platform is situated in a university cafe. We observe significant engagement with the system -- over 200 individuals independently volunteered to provide a total of over 800 interaction episodes. Our findings validate the proposed incentives as mechanisms for shaping users' data quantity and quality. Further, we demonstrate that the crowdsourced data can serve as useful pre-training data for policies fine-tuned on expert demonstrations -- boosting performance up to 20% compared to when this data is not available. These results suggest the potential for RoboCrowd to reduce the burden of robot data collection by carefully implementing crowdsourcing and incentive design principles.
ALOHA Unleashed: A Simple Recipe for Robot Dexterity
Oct 17, 2024Recent work has shown promising results for learning end-to-end robot policies using imitation learning. In this work we address the question of how far can we push imitation learning for challenging dexterous manipulation tasks. We show that a simple recipe of large scale data collection on the ALOHA 2 platform, combined with expressive models such as Diffusion Policies, can be effective in learning challenging bimanual manipulation tasks involving deformable objects and complex contact rich dynamics. We demonstrate our recipe on 5 challenging real-world and 3 simulated tasks and demonstrate improved performance over state-of-the-art baselines. The project website and videos can be found at aloha-unleashed.github.io.
Surgical Robot Transformer (SRT): Imitation Learning for Surgical Tasks
Jul 17, 2024



We explore whether surgical manipulation tasks can be learned on the da Vinci robot via imitation learning. However, the da Vinci system presents unique challenges which hinder straight-forward implementation of imitation learning. Notably, its forward kinematics is inconsistent due to imprecise joint measurements, and naively training a policy using such approximate kinematics data often leads to task failure. To overcome this limitation, we introduce a relative action formulation which enables successful policy training and deployment using its approximate kinematics data. A promising outcome of this approach is that the large repository of clinical data, which contains approximate kinematics, may be directly utilized for robot learning without further corrections. We demonstrate our findings through successful execution of three fundamental surgical tasks, including tissue manipulation, needle handling, and knot-tying.
Yell At Your Robot: Improving On-the-Fly from Language Corrections
Mar 19, 2024Hierarchical policies that combine language and low-level control have been shown to perform impressively long-horizon robotic tasks, by leveraging either zero-shot high-level planners like pretrained language and vision-language models (LLMs/VLMs) or models trained on annotated robotic demonstrations. However, for complex and dexterous skills, attaining high success rates on long-horizon tasks still represents a major challenge -- the longer the task is, the more likely it is that some stage will fail. Can humans help the robot to continuously improve its long-horizon task performance through intuitive and natural feedback? In this paper, we make the following observation: high-level policies that index into sufficiently rich and expressive low-level language-conditioned skills can be readily supervised with human feedback in the form of language corrections. We show that even fine-grained corrections, such as small movements ("move a bit to the left"), can be effectively incorporated into high-level policies, and that such corrections can be readily obtained from humans observing the robot and making occasional suggestions. This framework enables robots not only to rapidly adapt to real-time language feedback, but also incorporate this feedback into an iterative training scheme that improves the high-level policy's ability to correct errors in both low-level execution and high-level decision-making purely from verbal feedback. Our evaluation on real hardware shows that this leads to significant performance improvement in long-horizon, dexterous manipulation tasks without the need for any additional teleoperation. Videos and code are available at https://yay-robot.github.io/.
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Mar 19, 2024



The creation of large, diverse, high-quality robot manipulation datasets is an important stepping stone on the path toward more capable and robust robotic manipulation policies. However, creating such datasets is challenging: collecting robot manipulation data in diverse environments poses logistical and safety challenges and requires substantial investments in hardware and human labour. As a result, even the most general robot manipulation policies today are mostly trained on data collected in a small number of environments with limited scene and task diversity. In this work, we introduce DROID (Distributed Robot Interaction Dataset), a diverse robot manipulation dataset with 76k demonstration trajectories or 350 hours of interaction data, collected across 564 scenes and 84 tasks by 50 data collectors in North America, Asia, and Europe over the course of 12 months. We demonstrate that training with DROID leads to policies with higher performance and improved generalization ability. We open source the full dataset, policy learning code, and a detailed guide for reproducing our robot hardware setup.
Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation
Jan 04, 2024



Imitation learning from human demonstrations has shown impressive performance in robotics. However, most results focus on table-top manipulation, lacking the mobility and dexterity necessary for generally useful tasks. In this work, we develop a system for imitating mobile manipulation tasks that are bimanual and require whole-body control. We first present Mobile ALOHA, a low-cost and whole-body teleoperation system for data collection. It augments the ALOHA system with a mobile base, and a whole-body teleoperation interface. Using data collected with Mobile ALOHA, we then perform supervised behavior cloning and find that co-training with existing static ALOHA datasets boosts performance on mobile manipulation tasks. With 50 demonstrations for each task, co-training can increase success rates by up to 90%, allowing Mobile ALOHA to autonomously complete complex mobile manipulation tasks such as sauteing and serving a piece of shrimp, opening a two-door wall cabinet to store heavy cooking pots, calling and entering an elevator, and lightly rinsing a used pan using a kitchen faucet. Project website: https://mobile-aloha.github.io
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
Waypoint-Based Imitation Learning for Robotic Manipulation
Jul 26, 2023While imitation learning methods have seen a resurgent interest for robotic manipulation, the well-known problem of compounding errors continues to afflict behavioral cloning (BC). Waypoints can help address this problem by reducing the horizon of the learning problem for BC, and thus, the errors compounded over time. However, waypoint labeling is underspecified, and requires additional human supervision. Can we generate waypoints automatically without any additional human supervision? Our key insight is that if a trajectory segment can be approximated by linear motion, the endpoints can be used as waypoints. We propose Automatic Waypoint Extraction (AWE) for imitation learning, a preprocessing module to decompose a demonstration into a minimal set of waypoints which when interpolated linearly can approximate the trajectory up to a specified error threshold. AWE can be combined with any BC algorithm, and we find that AWE can increase the success rate of state-of-the-art algorithms by up to 25% in simulation and by 4-28% on real-world bimanual manipulation tasks, reducing the decision making horizon by up to a factor of 10. Videos and code are available at https://lucys0.github.io/awe/
Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
Apr 23, 2023



Fine manipulation tasks, such as threading cable ties or slotting a battery, are notoriously difficult for robots because they require precision, careful coordination of contact forces, and closed-loop visual feedback. Performing these tasks typically requires high-end robots, accurate sensors, or careful calibration, which can be expensive and difficult to set up. Can learning enable low-cost and imprecise hardware to perform these fine manipulation tasks? We present a low-cost system that performs end-to-end imitation learning directly from real demonstrations, collected with a custom teleoperation interface. Imitation learning, however, presents its own challenges, particularly in high-precision domains: errors in the policy can compound over time, and human demonstrations can be non-stationary. To address these challenges, we develop a simple yet novel algorithm, Action Chunking with Transformers (ACT), which learns a generative model over action sequences. ACT allows the robot to learn 6 difficult tasks in the real world, such as opening a translucent condiment cup and slotting a battery with 80-90% success, with only 10 minutes worth of demonstrations. Project website: https://tonyzhaozh.github.io/aloha/