 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMovingParts: Motion-based 3D Part Discovery in Dynamic Radiance Field
Mar 10, 2023We present MovingParts, a NeRF-based method for dynamic scene reconstruction and part discovery. We consider motion as an important cue for identifying parts, that all particles on the same part share the common motion pattern. From the perspective of fluid simulation, existing deformation-based methods for dynamic NeRF can be seen as parameterizing the scene motion under the Eulerian view, i.e., focusing on specific locations in space through which the fluid flows as time passes. However, it is intractable to extract the motion of constituting objects or parts using the Eulerian view representation. In this work, we introduce the dual Lagrangian view and enforce representations under the Eulerian/Lagrangian views to be cycle-consistent. Under the Lagrangian view, we parameterize the scene motion by tracking the trajectory of particles on objects. The Lagrangian view makes it convenient to discover parts by factorizing the scene motion as a composition of part-level rigid motions. Experimentally, our method can achieve fast and high-quality dynamic scene reconstruction from even a single moving camera, and the induced part-based representation allows direct applications of part tracking, animation, 3D scene editing, etc.
RoboNinja: Learning an Adaptive Cutting Policy for Multi-Material Objects
Feb 22, 2023



We introduce RoboNinja, a learning-based cutting system for multi-material objects (i.e., soft objects with rigid cores such as avocados or mangos). In contrast to prior works using open-loop cutting actions to cut through single-material objects (e.g., slicing a cucumber), RoboNinja aims to remove the soft part of an object while preserving the rigid core, thereby maximizing the yield. To achieve this, our system closes the perception-action loop by utilizing an interactive state estimator and an adaptive cutting policy. The system first employs sparse collision information to iteratively estimate the position and geometry of an object's core and then generates closed-loop cutting actions based on the estimated state and a tolerance value. The "adaptiveness" of the policy is achieved through the tolerance value, which modulates the policy's conservativeness when encountering collisions, maintaining an adaptive safety distance from the estimated core. Learning such cutting skills directly on a real-world robot is challenging. Yet, existing simulators are limited in simulating multi-material objects or computing the energy consumption during the cutting process. To address this issue, we develop a differentiable cutting simulator that supports multi-material coupling and allows for the generation of optimized trajectories as demonstrations for policy learning. Furthermore, by using a low-cost force sensor to capture collision feedback, we were able to successfully deploy the learned model in real-world scenarios, including objects with diverse core geometries and soft materials.
ManiSkill2: A Unified Benchmark for Generalizable Manipulation Skills
Feb 09, 2023Generalizable manipulation skills, which can be composed to tackle long-horizon and complex daily chores, are one of the cornerstones of Embodied AI. However, existing benchmarks, mostly composed of a suite of simulatable environments, are insufficient to push cutting-edge research works because they lack object-level topological and geometric variations, are not based on fully dynamic simulation, or are short of native support for multiple types of manipulation tasks. To this end, we present ManiSkill2, the next generation of the SAPIEN ManiSkill benchmark, to address critical pain points often encountered by researchers when using benchmarks for generalizable manipulation skills. ManiSkill2 includes 20 manipulation task families with 2000+ object models and 4M+ demonstration frames, which cover stationary/mobile-base, single/dual-arm, and rigid/soft-body manipulation tasks with 2D/3D-input data simulated by fully dynamic engines. It defines a unified interface and evaluation protocol to support a wide range of algorithms (e.g., classic sense-plan-act, RL, IL), visual observations (point cloud, RGBD), and controllers (e.g., action type and parameterization). Moreover, it empowers fast visual input learning algorithms so that a CNN-based policy can collect samples at about 2000 FPS with 1 GPU and 16 processes on a regular workstation. It implements a render server infrastructure to allow sharing rendering resources across all environments, thereby significantly reducing memory usage. We open-source all codes of our benchmark (simulator, environments, and baselines) and host an online challenge open to interdisciplinary researchers.
Planning with Spatial-Temporal Abstraction from Point Clouds for Deformable Object Manipulation
Oct 27, 2022Effective planning of long-horizon deformable object manipulation requires suitable abstractions at both the spatial and temporal levels. Previous methods typically either focus on short-horizon tasks or make strong assumptions that full-state information is available, which prevents their use on deformable objects. In this paper, we propose PlAnning with Spatial-Temporal Abstraction (PASTA), which incorporates both spatial abstraction (reasoning about objects and their relations to each other) and temporal abstraction (reasoning over skills instead of low-level actions). Our framework maps high-dimension 3D observations such as point clouds into a set of latent vectors and plans over skill sequences on top of the latent set representation. We show that our method can effectively perform challenging sequential deformable object manipulation tasks in the real world, which require combining multiple tool-use skills such as cutting with a knife, pushing with a pusher, and spreading the dough with a roller.
Abstract-to-Executable Trajectory Translation for One-Shot Task Generalization
Oct 14, 2022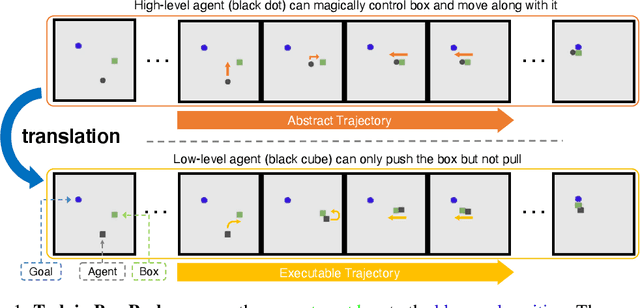
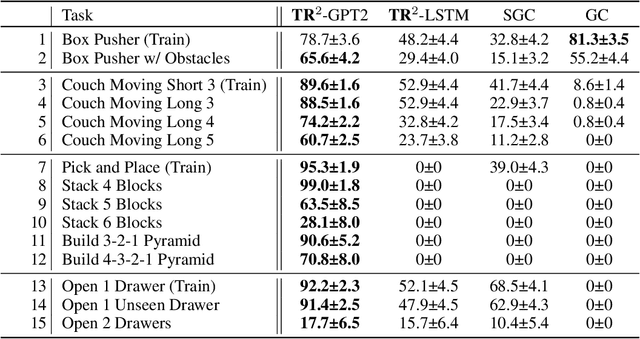
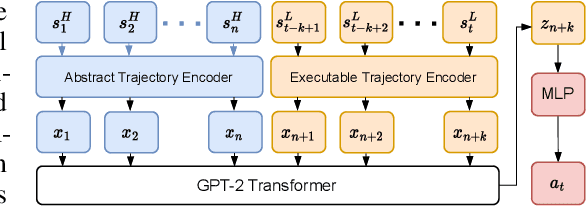
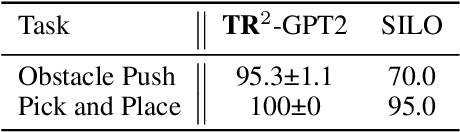
Training long-horizon robotic policies in complex physical environments is essential for many applications, such as robotic manipulation. However, learning a policy that can generalize to unseen tasks is challenging. In this work, we propose to achieve one-shot task generalization by decoupling plan generation and plan execution. Specifically, our method solves complex long-horizon tasks in three steps: build a paired abstract environment by simplifying geometry and physics, generate abstract trajectories, and solve the original task by an abstract-to-executable trajectory translator. In the abstract environment, complex dynamics such as physical manipulation are removed, making abstract trajectories easier to generate. However, this introduces a large domain gap between abstract trajectories and the actual executed trajectories as abstract trajectories lack low-level details and are not aligned frame-to-frame with the executed trajectory. In a manner reminiscent of language translation, our approach leverages a seq-to-seq model to overcome the large domain gap between the abstract and executable trajectories, enabling the low-level policy to follow the abstract trajectory. Experimental results on various unseen long-horizon tasks with different robot embodiments demonstrate the practicability of our methods to achieve one-shot task generalization.
RoboCraft: Learning to See, Simulate, and Shape Elasto-Plastic Objects with Graph Networks
May 05, 2022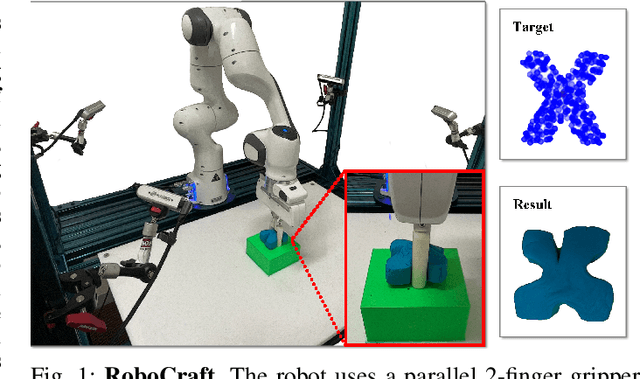
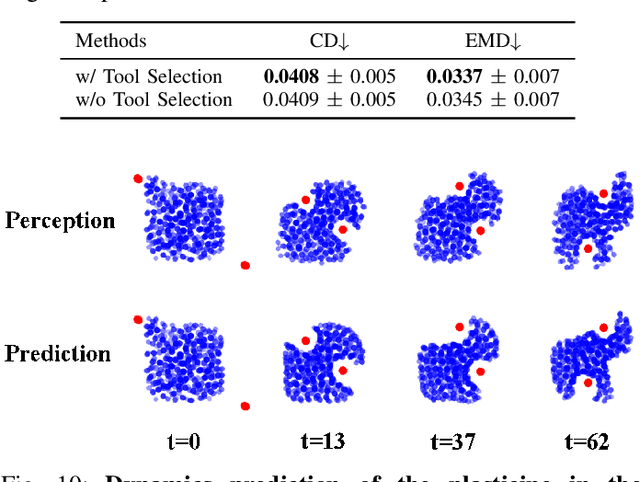

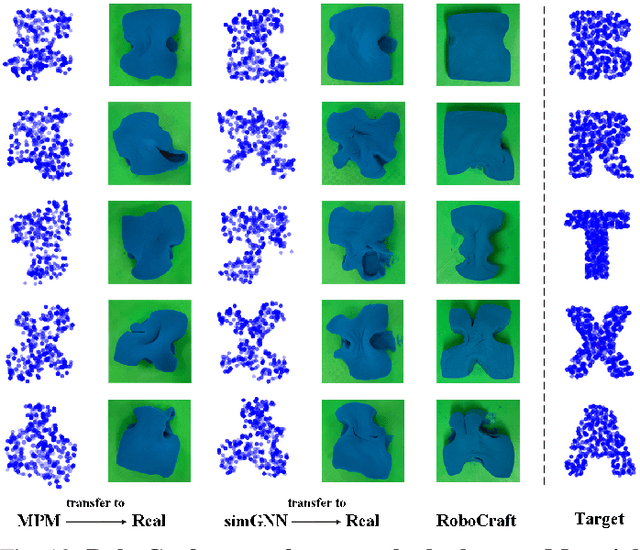
Modeling and manipulating elasto-plastic objects are essential capabilities for robots to perform complex industrial and household interaction tasks (e.g., stuffing dumplings, rolling sushi, and making pottery). However, due to the high degree of freedom of elasto-plastic objects, significant challenges exist in virtually every aspect of the robotic manipulation pipeline, e.g., representing the states, modeling the dynamics, and synthesizing the control signals. We propose to tackle these challenges by employing a particle-based representation for elasto-plastic objects in a model-based planning framework. Our system, RoboCraft, only assumes access to raw RGBD visual observations. It transforms the sensing data into particles and learns a particle-based dynamics model using graph neural networks (GNNs) to capture the structure of the underlying system. The learned model can then be coupled with model-predictive control (MPC) algorithms to plan the robot's behavior. We show through experiments that with just 10 minutes of real-world robotic interaction data, our robot can learn a dynamics model that can be used to synthesize control signals to deform elasto-plastic objects into various target shapes, including shapes that the robot has never encountered before. We perform systematic evaluations in both simulation and the real world to demonstrate the robot's manipulation capabilities and ability to generalize to a more complex action space, different tool shapes, and a mixture of motion modes. We also conduct comparisons between RoboCraft and untrained human subjects controlling the gripper to manipulate deformable objects in both simulation and the real world. Our learned model-based planning framework is comparable to and sometimes better than human subjects on the tested tasks.
Contact Points Discovery for Soft-Body Manipulations with Differentiable Physics
May 05, 2022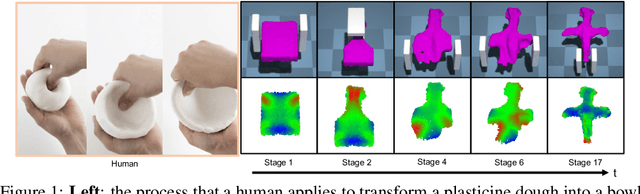
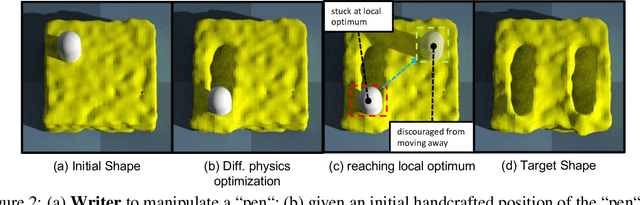
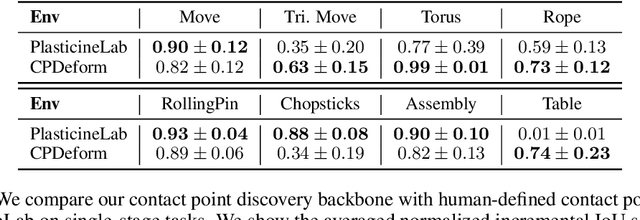
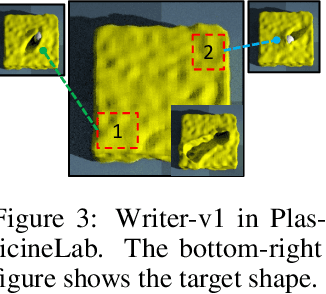
Differentiable physics has recently been shown as a powerful tool for solving soft-body manipulation tasks. However, the differentiable physics solver often gets stuck when the initial contact points of the end effectors are sub-optimal or when performing multi-stage tasks that require contact point switching, which often leads to local minima. To address this challenge, we propose a contact point discovery approach (CPDeform) that guides the stand-alone differentiable physics solver to deform various soft-body plasticines. The key idea of our approach is to integrate optimal transport-based contact points discovery into the differentiable physics solver to overcome the local minima from initial contact points or contact switching. On single-stage tasks, our method can automatically find suitable initial contact points based on transport priorities. On complex multi-stage tasks, we can iteratively switch the contact points of end-effectors based on transport priorities. To evaluate the effectiveness of our method, we introduce PlasticineLab-M that extends the existing differentiable physics benchmark PlasticineLab to seven new challenging multi-stage soft-body manipulation tasks. Extensive experimental results suggest that: 1) on multi-stage tasks that are infeasible for the vanilla differentiable physics solver, our approach discovers contact points that efficiently guide the solver to completion; 2) on tasks where the vanilla solver performs sub-optimally or near-optimally, our contact point discovery method performs better than or on par with the manipulation performance obtained with handcrafted contact points.
DiffSkill: Skill Abstraction from Differentiable Physics for Deformable Object Manipulations with Tools
Mar 31, 2022
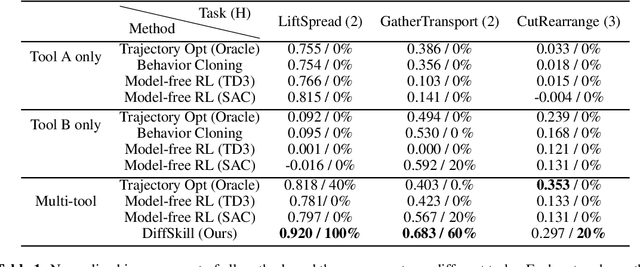
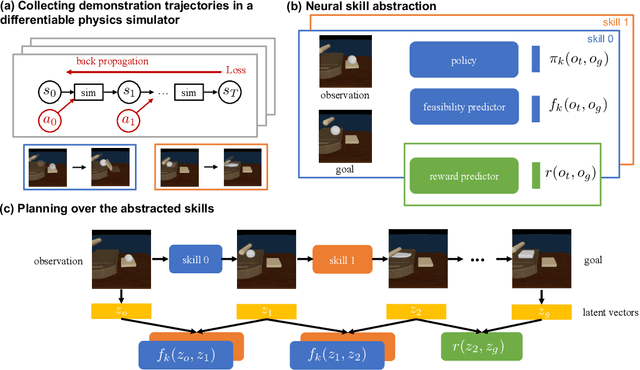
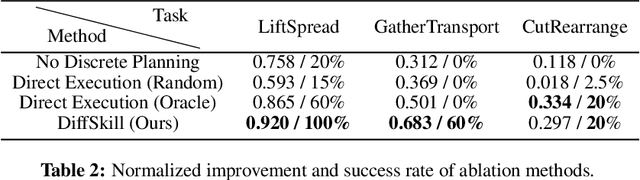
We consider the problem of sequential robotic manipulation of deformable objects using tools. Previous works have shown that differentiable physics simulators provide gradients to the environment state and help trajectory optimization to converge orders of magnitude faster than model-free reinforcement learning algorithms for deformable object manipulation. However, such gradient-based trajectory optimization typically requires access to the full simulator states and can only solve short-horizon, single-skill tasks due to local optima. In this work, we propose a novel framework, named DiffSkill, that uses a differentiable physics simulator for skill abstraction to solve long-horizon deformable object manipulation tasks from sensory observations. In particular, we first obtain short-horizon skills using individual tools from a gradient-based optimizer, using the full state information in a differentiable simulator; we then learn a neural skill abstractor from the demonstration trajectories which takes RGBD images as input. Finally, we plan over the skills by finding the intermediate goals and then solve long-horizon tasks. We show the advantages of our method in a new set of sequential deformable object manipulation tasks compared to previous reinforcement learning algorithms and compared to the trajectory optimizer.
Learning Multi-Object Dynamics with Compositional Neural Radiance Fields
Mar 04, 2022
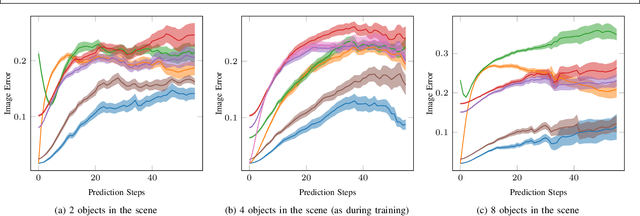
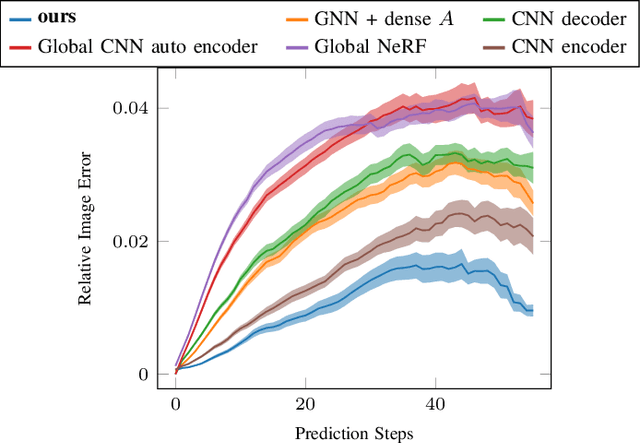
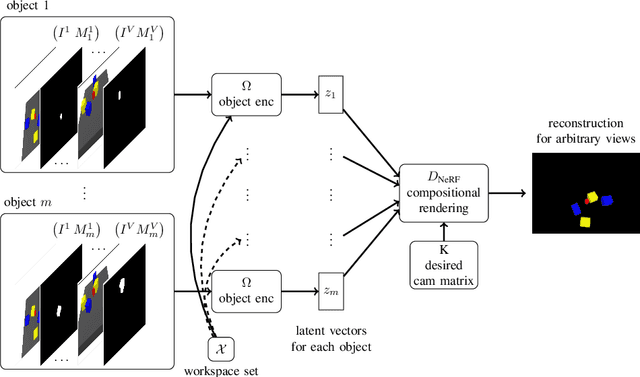
We present a method to learn compositional predictive models from image observations based on implicit object encoders, Neural Radiance Fields (NeRFs), and graph neural networks. A central question in learning dynamic models from sensor observations is on which representations predictions should be performed. NeRFs have become a popular choice for representing scenes due to their strong 3D prior. However, most NeRF approaches are trained on a single scene, representing the whole scene with a global model, making generalization to novel scenes, containing different numbers of objects, challenging. Instead, we present a compositional, object-centric auto-encoder framework that maps multiple views of the scene to a \emph{set} of latent vectors representing each object separately. The latent vectors parameterize individual NeRF models from which the scene can be reconstructed and rendered from novel viewpoints. We train a graph neural network dynamics model in the latent space to achieve compositionality for dynamics prediction. A key feature of our approach is that the learned 3D information of the scene through the NeRF model enables us to incorporate structural priors in learning the dynamics models, making long-term predictions more stable. The model can further be used to synthesize new scenes from individual object observations. For planning, we utilize RRTs in the learned latent space, where we can exploit our model and the implicit object encoder to make sampling the latent space informative and more efficient. In the experiments, we show that the model outperforms several baselines on a pushing task containing many objects. Video: https://dannydriess.github.io/compnerfdyn/
Close the Visual Domain Gap by Physics-Grounded Active Stereovision Depth Sensor Simulation
Feb 07, 2022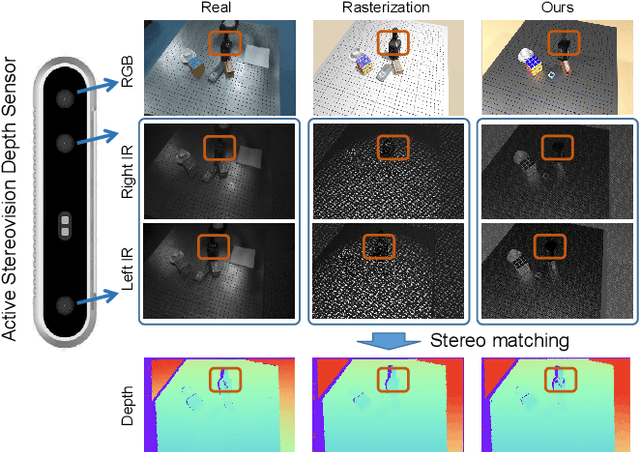
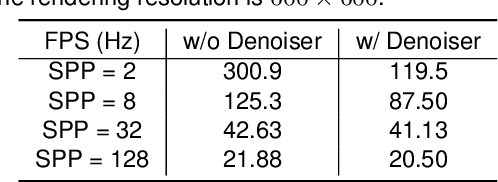
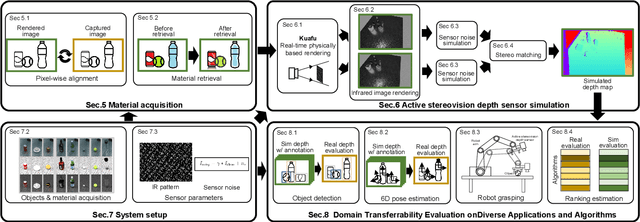
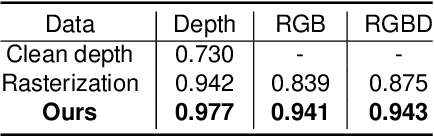
In this paper, we focus on the simulation of active stereovision depth sensors, which are popular in both academic and industry communities. Inspired by the underlying mechanism of the sensors, we designed a fully physics-grounded simulation pipeline, which includes material acquisition, ray tracing based infrared (IR) image rendering, IR noise simulation, and depth estimation. The pipeline is able to generate depth maps with material-dependent error patterns similar to a real depth sensor. We conduct extensive experiments to show that perception algorithms and reinforcement learning policies trained in our simulation platform could transfer well to real world test cases without any fine-tuning. Furthermore, due to the high degree of realism of this simulation, our depth sensor simulator can be used as a convenient testbed to evaluate the algorithm performance in the real world, which will largely reduce the human effort in developing robotic algorithms. The entire pipeline has been integrated into the SAPIEN simulator and is open-sourced to promote the research of vision and robotics communities.