 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUndress to Redress: A Training-Free Framework for Virtual Try-On
Aug 11, 2025Virtual try-on (VTON) is a crucial task for enhancing user experience in online shopping by generating realistic garment previews on personal photos. Although existing methods have achieved impressive results, they struggle with long-sleeve-to-short-sleeve conversions-a common and practical scenario-often producing unrealistic outputs when exposed skin is underrepresented in the original image. We argue that this challenge arises from the ''majority'' completion rule in current VTON models, which leads to inaccurate skin restoration in such cases. To address this, we propose UR-VTON (Undress-Redress Virtual Try-ON), a novel, training-free framework that can be seamlessly integrated with any existing VTON method. UR-VTON introduces an ''undress-to-redress'' mechanism: it first reveals the user's torso by virtually ''undressing,'' then applies the target short-sleeve garment, effectively decomposing the conversion into two more manageable steps. Additionally, we incorporate Dynamic Classifier-Free Guidance scheduling to balance diversity and image quality during DDPM sampling, and employ Structural Refiner to enhance detail fidelity using high-frequency cues. Finally, we present LS-TON, a new benchmark for long-sleeve-to-short-sleeve try-on. Extensive experiments demonstrate that UR-VTON outperforms state-of-the-art methods in both detail preservation and image quality. Code will be released upon acceptance.
Pose-RFT: Enhancing MLLMs for 3D Pose Generation via Hybrid Action Reinforcement Fine-Tuning
Aug 11, 2025Generating 3D human poses from multimodal inputs such as images or text requires models to capture both rich spatial and semantic correspondences. While pose-specific multimodal large language models (MLLMs) have shown promise in this task, they are typically trained with supervised objectives such as SMPL parameter regression or token-level prediction, which struggle to model the inherent ambiguity and achieve task-specific alignment required for accurate 3D pose generation. To address these limitations, we propose Pose-RFT, a reinforcement fine-tuning framework tailored for 3D human pose generation in MLLMs. We formulate the task as a hybrid action reinforcement learning problem that jointly optimizes discrete language prediction and continuous pose generation. To this end, we introduce HyGRPO, a hybrid reinforcement learning algorithm that performs group-wise reward normalization over sampled responses to guide joint optimization of discrete and continuous actions. Pose-RFT further incorporates task-specific reward functions to guide optimization towards spatial alignment in image-to-pose generation and semantic consistency in text-to-pose generation. Extensive experiments on multiple pose generation benchmarks demonstrate that Pose-RFT significantly improves performance over existing pose-specific MLLMs, validating the effectiveness of hybrid action reinforcement fine-tuning for 3D pose generation.
SyncTalk++: High-Fidelity and Efficient Synchronized Talking Heads Synthesis Using Gaussian Splatting
Jun 17, 2025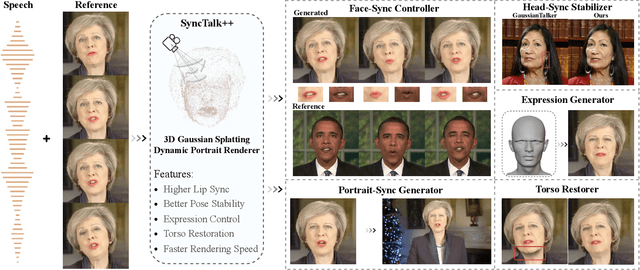
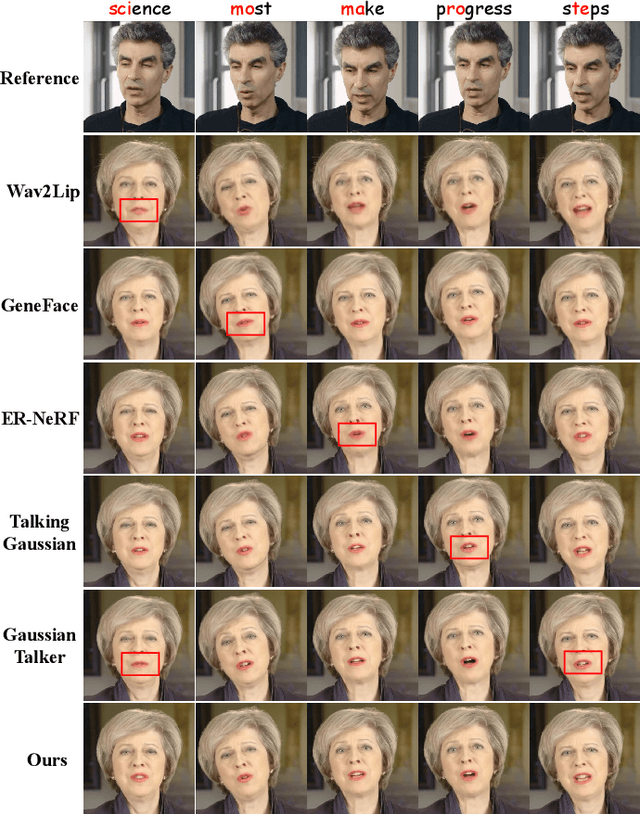
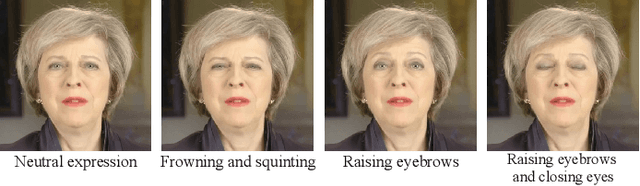
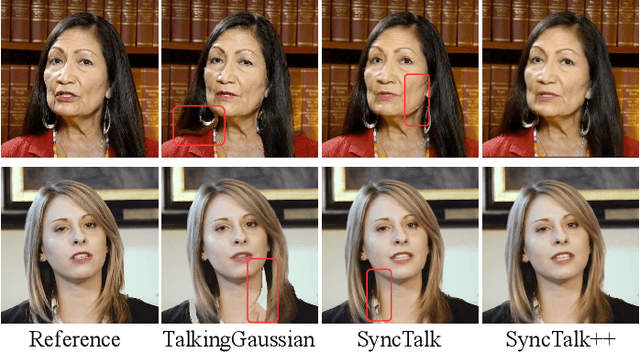
Achieving high synchronization in the synthesis of realistic, speech-driven talking head videos presents a significant challenge. A lifelike talking head requires synchronized coordination of subject identity, lip movements, facial expressions, and head poses. The absence of these synchronizations is a fundamental flaw, leading to unrealistic results. To address the critical issue of synchronization, identified as the ''devil'' in creating realistic talking heads, we introduce SyncTalk++, which features a Dynamic Portrait Renderer with Gaussian Splatting to ensure consistent subject identity preservation and a Face-Sync Controller that aligns lip movements with speech while innovatively using a 3D facial blendshape model to reconstruct accurate facial expressions. To ensure natural head movements, we propose a Head-Sync Stabilizer, which optimizes head poses for greater stability. Additionally, SyncTalk++ enhances robustness to out-of-distribution (OOD) audio by incorporating an Expression Generator and a Torso Restorer, which generate speech-matched facial expressions and seamless torso regions. Our approach maintains consistency and continuity in visual details across frames and significantly improves rendering speed and quality, achieving up to 101 frames per second. Extensive experiments and user studies demonstrate that SyncTalk++ outperforms state-of-the-art methods in synchronization and realism. We recommend watching the supplementary video: https://ziqiaopeng.github.io/synctalk++.
RoboPARA: Dual-Arm Robot Planning with Parallel Allocation and Recomposition Across Tasks
Jun 07, 2025Dual-arm robots play a crucial role in improving efficiency and flexibility in complex multitasking scenarios. While existing methods have achieved promising results in task planning, they often fail to fully optimize task parallelism, limiting the potential of dual-arm collaboration. To address this issue, we propose RoboPARA, a novel large language model (LLM)-driven framework for dual-arm task parallelism planning. RoboPARA employs a two-stage process: (1) Dependency Graph-based Planning Candidates Generation, which constructs directed acyclic graphs (DAGs) to model task dependencies and eliminate redundancy, and (2) Graph Re-Traversal-based Dual-Arm Parallel Planning, which optimizes DAG traversal to maximize parallelism while maintaining task coherence. In addition, we introduce the Cross-Scenario Dual-Arm Parallel Task dataset (X-DAPT dataset), the first dataset specifically designed to evaluate dual-arm task parallelism across diverse scenarios and difficulty levels. Extensive experiments on the X-DAPT dataset demonstrate that RoboPARA significantly outperforms existing methods, achieving higher efficiency and reliability, particularly in complex task combinations. The code and dataset will be released upon acceptance.
HF-VTON: High-Fidelity Virtual Try-On via Consistent Geometric and Semantic Alignment
May 26, 2025Virtual try-on technology has become increasingly important in the fashion and retail industries, enabling the generation of high-fidelity garment images that adapt seamlessly to target human models. While existing methods have achieved notable progress, they still face significant challenges in maintaining consistency across different poses. Specifically, geometric distortions lead to a lack of spatial consistency, mismatches in garment structure and texture across poses result in semantic inconsistency, and the loss or distortion of fine-grained details diminishes visual fidelity. To address these challenges, we propose HF-VTON, a novel framework that ensures high-fidelity virtual try-on performance across diverse poses. HF-VTON consists of three key modules: (1) the Appearance-Preserving Warp Alignment Module (APWAM), which aligns garments to human poses, addressing geometric deformations and ensuring spatial consistency; (2) the Semantic Representation and Comprehension Module (SRCM), which captures fine-grained garment attributes and multi-pose data to enhance semantic representation, maintaining structural, textural, and pattern consistency; and (3) the Multimodal Prior-Guided Appearance Generation Module (MPAGM), which integrates multimodal features and prior knowledge from pre-trained models to optimize appearance generation, ensuring both semantic and geometric consistency. Additionally, to overcome data limitations in existing benchmarks, we introduce the SAMP-VTONS dataset, featuring multi-pose pairs and rich textual annotations for a more comprehensive evaluation. Experimental results demonstrate that HF-VTON outperforms state-of-the-art methods on both VITON-HD and SAMP-VTONS, excelling in visual fidelity, semantic consistency, and detail preservation.
DualTalk: Dual-Speaker Interaction for 3D Talking Head Conversations
May 26, 2025In face-to-face conversations, individuals need to switch between speaking and listening roles seamlessly. Existing 3D talking head generation models focus solely on speaking or listening, neglecting the natural dynamics of interactive conversation, which leads to unnatural interactions and awkward transitions. To address this issue, we propose a new task -- multi-round dual-speaker interaction for 3D talking head generation -- which requires models to handle and generate both speaking and listening behaviors in continuous conversation. To solve this task, we introduce DualTalk, a novel unified framework that integrates the dynamic behaviors of speakers and listeners to simulate realistic and coherent dialogue interactions. This framework not only synthesizes lifelike talking heads when speaking but also generates continuous and vivid non-verbal feedback when listening, effectively capturing the interplay between the roles. We also create a new dataset featuring 50 hours of multi-round conversations with over 1,000 characters, where participants continuously switch between speaking and listening roles. Extensive experiments demonstrate that our method significantly enhances the naturalness and expressiveness of 3D talking heads in dual-speaker conversations. We recommend watching the supplementary video: https://ziqiaopeng.github.io/dualtalk.
BitHydra: Towards Bit-flip Inference Cost Attack against Large Language Models
May 22, 2025Large language models (LLMs) have shown impressive capabilities across a wide range of applications, but their ever-increasing size and resource demands make them vulnerable to inference cost attacks, where attackers induce victim LLMs to generate the longest possible output content. In this paper, we revisit existing inference cost attacks and reveal that these methods can hardly produce large-scale malicious effects since they are self-targeting, where attackers are also the users and therefore have to execute attacks solely through the inputs, whose generated content will be charged by LLMs and can only directly influence themselves. Motivated by these findings, this paper introduces a new type of inference cost attacks (dubbed 'bit-flip inference cost attack') that target the victim model itself rather than its inputs. Specifically, we design a simple yet effective method (dubbed 'BitHydra') to effectively flip critical bits of model parameters. This process is guided by a loss function designed to suppress <EOS> token's probability with an efficient critical bit search algorithm, thus explicitly defining the attack objective and enabling effective optimization. We evaluate our method on 11 LLMs ranging from 1.5B to 14B parameters under both int8 and float16 settings. Experimental results demonstrate that with just 4 search samples and as few as 3 bit flips, BitHydra can force 100% of test prompts to reach the maximum generation length (e.g., 2048 tokens) on representative LLMs such as LLaMA3, highlighting its efficiency, scalability, and strong transferability across unseen inputs.
MatchDance: Collaborative Mamba-Transformer Architecture Matching for High-Quality 3D Dance Synthesis
May 21, 2025Music-to-dance generation represents a challenging yet pivotal task at the intersection of choreography, virtual reality, and creative content generation. Despite its significance, existing methods face substantial limitation in achieving choreographic consistency. To address the challenge, we propose MatchDance, a novel framework for music-to-dance generation that constructs a latent representation to enhance choreographic consistency. MatchDance employs a two-stage design: (1) a Kinematic-Dynamic-based Quantization Stage (KDQS), which encodes dance motions into a latent representation by Finite Scalar Quantization (FSQ) with kinematic-dynamic constraints and reconstructs them with high fidelity, and (2) a Hybrid Music-to-Dance Generation Stage(HMDGS), which uses a Mamba-Transformer hybrid architecture to map music into the latent representation, followed by the KDQS decoder to generate 3D dance motions. Additionally, a music-dance retrieval framework and comprehensive metrics are introduced for evaluation. Extensive experiments on the FineDance dataset demonstrate state-of-the-art performance. Code will be released upon acceptance.
AsynFusion: Towards Asynchronous Latent Consistency Models for Decoupled Whole-Body Audio-Driven Avatars
May 21, 2025Whole-body audio-driven avatar pose and expression generation is a critical task for creating lifelike digital humans and enhancing the capabilities of interactive virtual agents, with wide-ranging applications in virtual reality, digital entertainment, and remote communication. Existing approaches often generate audio-driven facial expressions and gestures independently, which introduces a significant limitation: the lack of seamless coordination between facial and gestural elements, resulting in less natural and cohesive animations. To address this limitation, we propose AsynFusion, a novel framework that leverages diffusion transformers to achieve harmonious expression and gesture synthesis. The proposed method is built upon a dual-branch DiT architecture, which enables the parallel generation of facial expressions and gestures. Within the model, we introduce a Cooperative Synchronization Module to facilitate bidirectional feature interaction between the two modalities, and an Asynchronous LCM Sampling strategy to reduce computational overhead while maintaining high-quality outputs. Extensive experiments demonstrate that AsynFusion achieves state-of-the-art performance in generating real-time, synchronized whole-body animations, consistently outperforming existing methods in both quantitative and qualitative evaluations.
TinyAlign: Boosting Lightweight Vision-Language Models by Mitigating Modal Alignment Bottlenecks
May 19, 2025Lightweight Vision-Language Models (VLMs) are indispensable for resource-constrained applications. The prevailing approach to aligning vision and language models involves freezing both the vision encoder and the language model while training small connector modules. However, this strategy heavily depends on the intrinsic capabilities of the language model, which can be suboptimal for lightweight models with limited representational capacity. In this work, we investigate this alignment bottleneck through the lens of mutual information, demonstrating that the constrained capacity of the language model inherently limits the Effective Mutual Information (EMI) between multimodal inputs and outputs, thereby compromising alignment quality. To address this challenge, we propose TinyAlign, a novel framework inspired by Retrieval-Augmented Generation, which strategically retrieves relevant context from a memory bank to enrich multimodal inputs and enhance their alignment. Extensive empirical evaluations reveal that TinyAlign significantly reduces training loss, accelerates convergence, and enhances task performance. Remarkably, it allows models to achieve baseline-level performance with only 40\% of the fine-tuning data, highlighting exceptional data efficiency. Our work thus offers a practical pathway for developing more capable lightweight VLMs while introducing a fresh theoretical lens to better understand and address alignment bottlenecks in constrained multimodal systems.