 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdapt2Reward: Adapting Video-Language Models to Generalizable Robotic Rewards via Failure Prompts
Jul 20, 2024

For a general-purpose robot to operate in reality, executing a broad range of instructions across various environments is imperative. Central to the reinforcement learning and planning for such robotic agents is a generalizable reward function. Recent advances in vision-language models, such as CLIP, have shown remarkable performance in the domain of deep learning, paving the way for open-domain visual recognition. However, collecting data on robots executing various language instructions across multiple environments remains a challenge. This paper aims to transfer video-language models with robust generalization into a generalizable language-conditioned reward function, only utilizing robot video data from a minimal amount of tasks in a singular environment. Unlike common robotic datasets used for training reward functions, human video-language datasets rarely contain trivial failure videos. To enhance the model's ability to distinguish between successful and failed robot executions, we cluster failure video features to enable the model to identify patterns within. For each cluster, we integrate a newly trained failure prompt into the text encoder to represent the corresponding failure mode. Our language-conditioned reward function shows outstanding generalization to new environments and new instructions for robot planning and reinforcement learning.
PD-TPE: Parallel Decoder with Text-guided Position Encoding for 3D Visual Grounding
Jul 19, 2024



3D visual grounding aims to locate the target object mentioned by free-formed natural language descriptions in 3D point cloud scenes. Most previous work requires the encoder-decoder to simultaneously align the attribute information of the target object and its relational information with the surrounding environment across modalities. This causes the queries' attention to be dispersed, potentially leading to an excessive focus on points irrelevant to the input language descriptions. To alleviate these issues, we propose PD-TPE, a visual-language model with a double-branch decoder. The two branches perform proposal feature decoding and surrounding layout awareness in parallel. Since their attention maps are not influenced by each other, the queries focus on tokens relevant to each branch's specific objective. In particular, we design a novel Text-guided Position Encoding method, which differs between the two branches. In the main branch, the priori relies on the relative positions between tokens and predicted 3D boxes, which direct the model to pay more attention to tokens near the object; in the surrounding branch, it is guided by the similarity between visual and text features, so that the queries attend to tokens that can provide effective layout information. Extensive experiments demonstrate that we surpass the state-of-the-art on two widely adopted 3D visual grounding datasets, ScanRefer and NR3D, by 1.8% and 2.2%, respectively. Codes will be made publicly available.
Searching Priors Makes Text-to-Video Synthesis Better
Jun 05, 2024



Significant advancements in video diffusion models have brought substantial progress to the field of text-to-video (T2V) synthesis. However, existing T2V synthesis model struggle to accurately generate complex motion dynamics, leading to a reduction in video realism. One possible solution is to collect massive data and train the model on it, but this would be extremely expensive. To alleviate this problem, in this paper, we reformulate the typical T2V generation process as a search-based generation pipeline. Instead of scaling up the model training, we employ existing videos as the motion prior database. Specifically, we divide T2V generation process into two steps: (i) For a given prompt input, we search existing text-video datasets to find videos with text labels that closely match the prompt motions. We propose a tailored search algorithm that emphasizes object motion features. (ii) Retrieved videos are processed and distilled into motion priors to fine-tune a pre-trained base T2V model, followed by generating desired videos using input prompt. By utilizing the priors gleaned from the searched videos, we enhance the realism of the generated videos' motion. All operations can be finished on a single NVIDIA RTX 4090 GPU. We validate our method against state-of-the-art T2V models across diverse prompt inputs. The code will be public.
AutoManual: Generating Instruction Manuals by LLM Agents via Interactive Environmental Learning
May 25, 2024



Large Language Models (LLM) based agents have shown promise in autonomously completing tasks across various domains, e.g., robotics, games, and web navigation. However, these agents typically require elaborate design and expert prompts to solve tasks in specific domains, which limits their adaptability. We introduce AutoManual, a framework enabling LLM agents to autonomously build their understanding through interaction and adapt to new environments. AutoManual categorizes environmental knowledge into diverse rules and optimizes them in an online fashion by two agents: 1) The Planner codes actionable plans based on current rules for interacting with the environment. 2) The Builder updates the rules through a well-structured rule system that facilitates online rule management and essential detail retention. To mitigate hallucinations in managing rules, we introduce \textit{case-conditioned prompting} strategy for the Builder. Finally, the Formulator agent compiles these rules into a comprehensive manual. The self-generated manual can not only improve the adaptability but also guide the planning of smaller LLMs while being human-readable. Given only one simple demonstration, AutoManual significantly improves task success rates, achieving 97.4\% with GPT-4-turbo and 86.2\% with GPT-3.5-turbo on ALFWorld benchmark tasks. The source code will be available soon.
Model Compression and Efficient Inference for Large Language Models: A Survey
Feb 15, 2024



Transformer based large language models have achieved tremendous success. However, the significant memory and computational costs incurred during the inference process make it challenging to deploy large models on resource-constrained devices. In this paper, we investigate compression and efficient inference methods for large language models from an algorithmic perspective. Regarding taxonomy, similar to smaller models, compression and acceleration algorithms for large language models can still be categorized into quantization, pruning, distillation, compact architecture design, dynamic networks. However, Large language models have two prominent characteristics compared to smaller models: (1) Most of compression algorithms require finetuning or even retraining the model after compression. The most notable aspect of large models is the very high cost associated with model finetuning or training. Therefore, many algorithms for large models, such as quantization and pruning, start to explore tuning-free algorithms. (2) Large models emphasize versatility and generalization rather than performance on a single task. Hence, many algorithms, such as knowledge distillation, focus on how to preserving their versatility and generalization after compression. Since these two characteristics were not very pronounced in early large models, we further distinguish large language models into medium models and ``real'' large models. Additionally, we also provide an introduction to some mature frameworks for efficient inference of large models, which can support basic compression or acceleration algorithms, greatly facilitating model deployment for users.
Few-shot Hybrid Domain Adaptation of Image Generators
Oct 30, 2023



Can a pre-trained generator be adapted to the hybrid of multiple target domains and generate images with integrated attributes of them? In this work, we introduce a new task -- Few-shot Hybrid Domain Adaptation (HDA). Given a source generator and several target domains, HDA aims to acquire an adapted generator that preserves the integrated attributes of all target domains, without overriding the source domain's characteristics. Compared with Domain Adaptation (DA), HDA offers greater flexibility and versatility to adapt generators to more composite and expansive domains. Simultaneously, HDA also presents more challenges than DA as we have access only to images from individual target domains and lack authentic images from the hybrid domain. To address this issue, we introduce a discriminator-free framework that directly encodes different domains' images into well-separable subspaces. To achieve HDA, we propose a novel directional subspace loss comprised of a distance loss and a direction loss. Concretely, the distance loss blends the attributes of all target domains by reducing the distances from generated images to all target subspaces. The direction loss preserves the characteristics from the source domain by guiding the adaptation along the perpendicular to subspaces. Experiments show that our method can obtain numerous domain-specific attributes in a single adapted generator, which surpasses the baseline methods in semantic similarity, image fidelity, and cross-domain consistency.
UniPAD: A Universal Pre-training Paradigm for Autonomous Driving
Oct 12, 2023



In the context of autonomous driving, the significance of effective feature learning is widely acknowledged. While conventional 3D self-supervised pre-training methods have shown widespread success, most methods follow the ideas originally designed for 2D images. In this paper, we present UniPAD, a novel self-supervised learning paradigm applying 3D volumetric differentiable rendering. UniPAD implicitly encodes 3D space, facilitating the reconstruction of continuous 3D shape structures and the intricate appearance characteristics of their 2D projections. The flexibility of our method enables seamless integration into both 2D and 3D frameworks, enabling a more holistic comprehension of the scenes. We manifest the feasibility and effectiveness of UniPAD by conducting extensive experiments on various downstream 3D tasks. Our method significantly improves lidar-, camera-, and lidar-camera-based baseline by 9.1, 7.7, and 6.9 NDS, respectively. Notably, our pre-training pipeline achieves 73.2 NDS for 3D object detection and 79.4 mIoU for 3D semantic segmentation on the nuScenes validation set, achieving state-of-the-art results in comparison with previous methods. The code will be available at https://github.com/Nightmare-n/UniPAD.
Few-Shot Domain Adaptation for Charge Prediction on Unprofessional Descriptions
Sep 29, 2023Recent works considering professional legal-linguistic style (PLLS) texts have shown promising results on the charge prediction task. However, unprofessional users also show an increasing demand on such a prediction service. There is a clear domain discrepancy between PLLS texts and non-PLLS texts expressed by those laypersons, which degrades the current SOTA models' performance on non-PLLS texts. A key challenge is the scarcity of non-PLLS data for most charge classes. This paper proposes a novel few-shot domain adaptation (FSDA) method named Disentangled Legal Content for Charge Prediction (DLCCP). Compared with existing FSDA works, which solely perform instance-level alignment without considering the negative impact of text style information existing in latent features, DLCCP (1) disentangles the content and style representations for better domain-invariant legal content learning with carefully designed optimization goals for content and style spaces and, (2) employs the constitutive elements knowledge of charges to extract and align element-level and instance-level content representations simultaneously. We contribute the first publicly available non-PLLS dataset named NCCP for developing layperson-friendly charge prediction models. Experiments on NCCP show the superiority of our methods over competitive baselines.
M$^3$CS: Multi-Target Masked Point Modeling with Learnable Codebook and Siamese Decoders
Sep 23, 2023Masked point modeling has become a promising scheme of self-supervised pre-training for point clouds. Existing methods reconstruct either the original points or related features as the objective of pre-training. However, considering the diversity of downstream tasks, it is necessary for the model to have both low- and high-level representation modeling capabilities to capture geometric details and semantic contexts during pre-training. To this end, M$^3$CS is proposed to enable the model with the above abilities. Specifically, with masked point cloud as input, M$^3$CS introduces two decoders to predict masked representations and the original points simultaneously. While an extra decoder doubles parameters for the decoding process and may lead to overfitting, we propose siamese decoders to keep the amount of learnable parameters unchanged. Further, we propose an online codebook projecting continuous tokens into discrete ones before reconstructing masked points. In such way, we can enforce the decoder to take effect through the combinations of tokens rather than remembering each token. Comprehensive experiments show that M$^3$CS achieves superior performance at both classification and segmentation tasks, outperforming existing methods.
A Study of Unsupervised Evaluation Metrics for Practical and Automatic Domain Adaptation
Aug 01, 2023
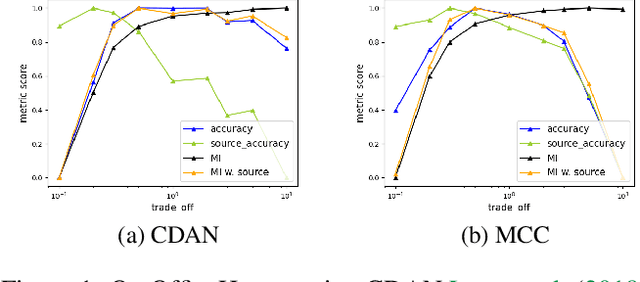
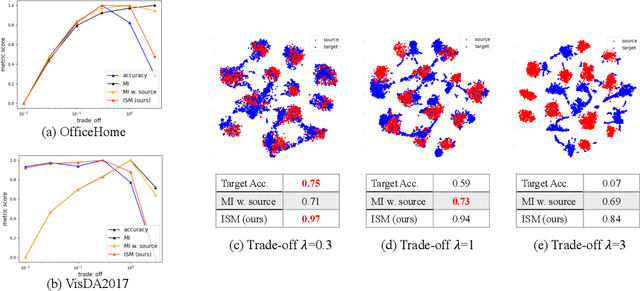
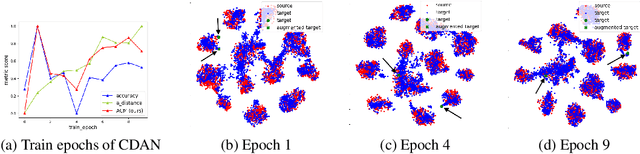
Unsupervised domain adaptation (UDA) methods facilitate the transfer of models to target domains without labels. However, these methods necessitate a labeled target validation set for hyper-parameter tuning and model selection. In this paper, we aim to find an evaluation metric capable of assessing the quality of a transferred model without access to target validation labels. We begin with the metric based on mutual information of the model prediction. Through empirical analysis, we identify three prevalent issues with this metric: 1) It does not account for the source structure. 2) It can be easily attacked. 3) It fails to detect negative transfer caused by the over-alignment of source and target features. To address the first two issues, we incorporate source accuracy into the metric and employ a new MLP classifier that is held out during training, significantly improving the result. To tackle the final issue, we integrate this enhanced metric with data augmentation, resulting in a novel unsupervised UDA metric called the Augmentation Consistency Metric (ACM). Additionally, we empirically demonstrate the shortcomings of previous experiment settings and conduct large-scale experiments to validate the effectiveness of our proposed metric. Furthermore, we employ our metric to automatically search for the optimal hyper-parameter set, achieving superior performance compared to manually tuned sets across four common benchmarks. Codes will be available soon.