 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeo-Align: Video Generation Alignment via Metric Geometry Reward
May 22, 2026Camera-controlled video generation has achieved remarkable progress in recent years. However, existing video-to-video re-rendering methods primarily rely on Supervised Fine-Tuning using synthetic datasets. At present, there is an extreme scarcity of synchronized, multi-view real-world video data. Consequently, the prevailing paradigm often exhibits limited generalization when processing out-of-distribution real-world videos, with models struggling to accurately adhere to physical scales and camera trajectories. To bridge this gap, we propose Geo-Align, the first Reinforcement Learning framework specifically designed for camera-controlled video re-rendering. Built upon a pretrained model, we optimize the model through a scale-aware perceptual reward mechanism. Specifically, we introduce a metric 3D estimator to extract precise camera trajectories from generated videos, explicitly penalizing deviations in rotation and translation. Furthermore, we meticulously designed a data pipeline strategy based on real-world conditioning videos and target camera trajectories derived from synthetic data, eliminating the reliance on paired data. Extensive experiments demonstrate that Geo-Align consistently outperforms existing supervised learning baselines in both precise camera controllability and visual fidelity, indicating the effectiveness of our method.
SANA-WM: Efficient Minute-Scale World Modeling with Hybrid Linear Diffusion Transformer
May 14, 2026We introduce SANA-WM, an efficient 2.6B-parameter open-source world model natively trained for one-minute generation, synthesizing high-fidelity, 720p, minute-scale videos with precise camera control. SANA-WM achieves visual quality comparable to large-scale industrial baselines such as LingBot-World and HY-WorldPlay, while significantly improving efficiency. Four core designs drive our architecture: (1) Hybrid Linear Attention combines frame-wise Gated DeltaNet (GDN) with softmax attention for memory-efficient long-context modeling. (2) Dual-Branch Camera Control ensures precise 6-DoF trajectory adherence. (3) Two-Stage Generation Pipeline applies a long-video refiner to stage-1 outputs, improving quality and consistency across sequences. (4) Robust Annotation Pipeline extracts accurate metric-scale 6-DoF camera poses from public videos to yield high-quality, spatiotemporally consistent action labels. Driven by these designs, SANA-WMdemonstrates remarkable efficiency across data, training compute, and inference hardware: it uses only $\sim$213K public video clips with metric-scale pose supervision, completes training in 15 days on 64 H100s, and generates each 60s clip on a single GPU; its distilled variant can be deployed on a single RTX 5090 with NVFP4 quantization to denoise a 60s 720p clip in 34s. On our one-minute world-model benchmark, SANA-WM demonstrates stronger action-following accuracy than prior open-source baselines and achieves comparable visual quality at $36\times$ higher throughput for scalable world modeling.
Warp-as-History: Generalizable Camera-Controlled Video Generation from One Training Video
May 14, 2026Camera-controlled video generation has made substantial progress, enabling generated videos to follow prescribed viewpoint trajectories. However, existing methods usually learn camera-specific conditioning through camera encoders, control branches, or attention and positional-encoding modifications, which often require post-training on large-scale camera-annotated videos. Training-free alternatives avoid such post-training, but often shift the cost to test-time optimization or extra denoising-time guidance. We propose Warp-as-History, a simple interface that turns camera-induced warps into camera-warped pseudo-history with target-frame positional alignment and visible-token selection. Given a target camera trajectory, we construct camera-warped pseudo-history from past observations and feed it through the model's visual-history pathway. Crucially, we align its positional encoding with the target frames being denoised and remove warped-history tokens without valid source observations. Without any training, architectural modification, or test-time optimization, this interface reveals a non-trivial zero-shot capability of a frozen video generation model to follow camera trajectories. Moreover, lightweight offline LoRA finetuning on only one camera-annotated video further improves this capability and generalizes to unseen videos, improving camera adherence, visual quality, and motion dynamics without test-time optimization or target-video adaptation. Extensive experiments on diverse datasets confirm the effectiveness of our method.
VINO: A Unified Visual Generator with Interleaved OmniModal Context
Jan 05, 2026We present VINO, a unified visual generator that performs image and video generation and editing within a single framework. Instead of relying on task-specific models or independent modules for each modality, VINO uses a shared diffusion backbone that conditions on text, images and videos, enabling a broad range of visual creation and editing tasks under one model. Specifically, VINO couples a vision-language model (VLM) with a Multimodal Diffusion Transformer (MMDiT), where multimodal inputs are encoded as interleaved conditioning tokens, and then used to guide the diffusion process. This design supports multi-reference grounding, long-form instruction following, and coherent identity preservation across static and dynamic content, while avoiding modality-specific architectural components. To train such a unified system, we introduce a multi-stage training pipeline that progressively expands a video generation base model into a unified, multi-task generator capable of both image and video input and output. Across diverse generation and editing benchmarks, VINO demonstrates strong visual quality, faithful instruction following, improved reference and attribute preservation, and more controllable multi-identity edits. Our results highlight a practical path toward scalable unified visual generation, and the promise of interleaved, in-context computation as a foundation for general-purpose visual creation.
Yume-1.5: A Text-Controlled Interactive World Generation Model
Dec 26, 2025Recent approaches have demonstrated the promise of using diffusion models to generate interactive and explorable worlds. However, most of these methods face critical challenges such as excessively large parameter sizes, reliance on lengthy inference steps, and rapidly growing historical context, which severely limit real-time performance and lack text-controlled generation capabilities. To address these challenges, we propose \method, a novel framework designed to generate realistic, interactive, and continuous worlds from a single image or text prompt. \method achieves this through a carefully designed framework that supports keyboard-based exploration of the generated worlds. The framework comprises three core components: (1) a long-video generation framework integrating unified context compression with linear attention; (2) a real-time streaming acceleration strategy powered by bidirectional attention distillation and an enhanced text embedding scheme; (3) a text-controlled method for generating world events. We have provided the codebase in the supplementary material.
WinT3R: Window-Based Streaming Reconstruction with Camera Token Pool
Sep 05, 2025We present WinT3R, a feed-forward reconstruction model capable of online prediction of precise camera poses and high-quality point maps. Previous methods suffer from a trade-off between reconstruction quality and real-time performance. To address this, we first introduce a sliding window mechanism that ensures sufficient information exchange among frames within the window, thereby improving the quality of geometric predictions without large computation. In addition, we leverage a compact representation of cameras and maintain a global camera token pool, which enhances the reliability of camera pose estimation without sacrificing efficiency. These designs enable WinT3R to achieve state-of-the-art performance in terms of online reconstruction quality, camera pose estimation, and reconstruction speed, as validated by extensive experiments on diverse datasets. Code and model are publicly available at https://github.com/LiZizun/WinT3R.
Learning Primitive Embodied World Models: Towards Scalable Robotic Learning
Aug 28, 2025



While video-generation-based embodied world models have gained increasing attention, their reliance on large-scale embodied interaction data remains a key bottleneck. The scarcity, difficulty of collection, and high dimensionality of embodied data fundamentally limit the alignment granularity between language and actions and exacerbate the challenge of long-horizon video generation--hindering generative models from achieving a "GPT moment" in the embodied domain. There is a naive observation: the diversity of embodied data far exceeds the relatively small space of possible primitive motions. Based on this insight, we propose a novel paradigm for world modeling--Primitive Embodied World Models (PEWM). By restricting video generation to fixed short horizons, our approach 1) enables fine-grained alignment between linguistic concepts and visual representations of robotic actions, 2) reduces learning complexity, 3) improves data efficiency in embodied data collection, and 4) decreases inference latency. By equipping with a modular Vision-Language Model (VLM) planner and a Start-Goal heatmap Guidance mechanism (SGG), PEWM further enables flexible closed-loop control and supports compositional generalization of primitive-level policies over extended, complex tasks. Our framework leverages the spatiotemporal vision priors in video models and the semantic awareness of VLMs to bridge the gap between fine-grained physical interaction and high-level reasoning, paving the way toward scalable, interpretable, and general-purpose embodied intelligence.
Yume: An Interactive World Generation Model
Jul 23, 2025



Yume aims to use images, text, or videos to create an interactive, realistic, and dynamic world, which allows exploration and control using peripheral devices or neural signals. In this report, we present a preview version of \method, which creates a dynamic world from an input image and allows exploration of the world using keyboard actions. To achieve this high-fidelity and interactive video world generation, we introduce a well-designed framework, which consists of four main components, including camera motion quantization, video generation architecture, advanced sampler, and model acceleration. First, we quantize camera motions for stable training and user-friendly interaction using keyboard inputs. Then, we introduce the Masked Video Diffusion Transformer~(MVDT) with a memory module for infinite video generation in an autoregressive manner. After that, training-free Anti-Artifact Mechanism (AAM) and Time Travel Sampling based on Stochastic Differential Equations (TTS-SDE) are introduced to the sampler for better visual quality and more precise control. Moreover, we investigate model acceleration by synergistic optimization of adversarial distillation and caching mechanisms. We use the high-quality world exploration dataset \sekai to train \method, and it achieves remarkable results in diverse scenes and applications. All data, codebase, and model weights are available on https://github.com/stdstu12/YUME. Yume will update monthly to achieve its original goal. Project page: https://stdstu12.github.io/YUME-Project/.
$π^3$: Scalable Permutation-Equivariant Visual Geometry Learning
Jul 17, 2025We introduce $\pi^3$, a feed-forward neural network that offers a novel approach to visual geometry reconstruction, breaking the reliance on a conventional fixed reference view. Previous methods often anchor their reconstructions to a designated viewpoint, an inductive bias that can lead to instability and failures if the reference is suboptimal. In contrast, $\pi^3$ employs a fully permutation-equivariant architecture to predict affine-invariant camera poses and scale-invariant local point maps without any reference frames. This design makes our model inherently robust to input ordering and highly scalable. These advantages enable our simple and bias-free approach to achieve state-of-the-art performance on a wide range of tasks, including camera pose estimation, monocular/video depth estimation, and dense point map reconstruction. Code and models are publicly available.
DreamComposer++: Empowering Diffusion Models with Multi-View Conditions for 3D Content Generation
Jul 03, 2025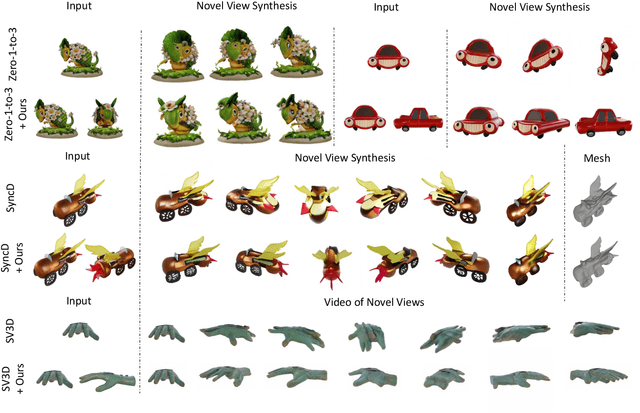
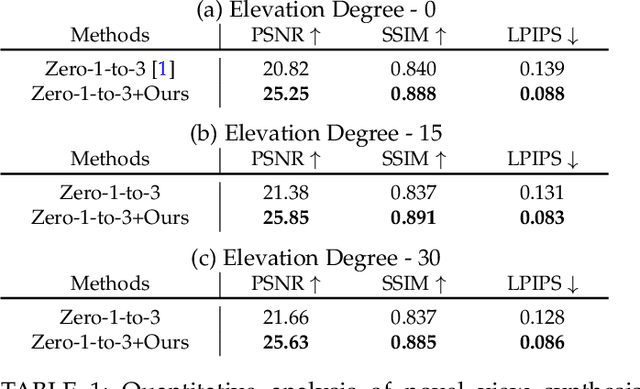
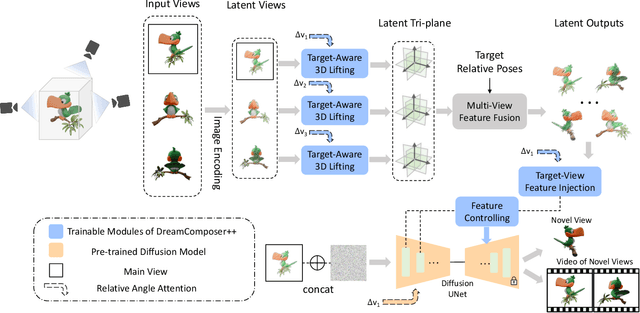
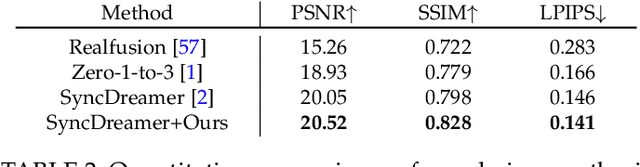
Recent advancements in leveraging pre-trained 2D diffusion models achieve the generation of high-quality novel views from a single in-the-wild image. However, existing works face challenges in producing controllable novel views due to the lack of information from multiple views. In this paper, we present DreamComposer++, a flexible and scalable framework designed to improve current view-aware diffusion models by incorporating multi-view conditions. Specifically, DreamComposer++ utilizes a view-aware 3D lifting module to extract 3D representations of an object from various views. These representations are then aggregated and rendered into the latent features of target view through the multi-view feature fusion module. Finally, the obtained features of target view are integrated into pre-trained image or video diffusion models for novel view synthesis. Experimental results demonstrate that DreamComposer++ seamlessly integrates with cutting-edge view-aware diffusion models and enhances their abilities to generate controllable novel views from multi-view conditions. This advancement facilitates controllable 3D object reconstruction and enables a wide range of applications.