 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPECTRE: Spectral Pre-training Embeddings with Cylindrical Temporal Rotary Position Encoding for Fine-Grained sEMG-Based Movement Decoding
Dec 27, 2025Decoding fine-grained movement from non-invasive surface Electromyography (sEMG) is a challenge for prosthetic control due to signal non-stationarity and low signal-to-noise ratios. Generic self-supervised learning (SSL) frameworks often yield suboptimal results on sEMG as they attempt to reconstruct noisy raw signals and lack the inductive bias to model the cylindrical topology of electrode arrays. To overcome these limitations, we introduce SPECTRE, a domain-specific SSL framework. SPECTRE features two primary contributions: a physiologically-grounded pre-training task and a novel positional encoding. The pre-training involves masked prediction of discrete pseudo-labels from clustered Short-Time Fourier Transform (STFT) representations, compelling the model to learn robust, physiologically relevant frequency patterns. Additionally, our Cylindrical Rotary Position Embedding (CyRoPE) factorizes embeddings along linear temporal and annular spatial dimensions, explicitly modeling the forearm sensor topology to capture muscle synergies. Evaluations on multiple datasets, including challenging data from individuals with amputation, demonstrate that SPECTRE establishes a new state-of-the-art for movement decoding, significantly outperforming both supervised baselines and generic SSL approaches. Ablation studies validate the critical roles of both spectral pre-training and CyRoPE. SPECTRE provides a robust foundation for practical myoelectric interfaces capable of handling real-world sEMG complexities.
LEMUR: Large scale End-to-end MUltimodal Recommendation
Nov 17, 2025Traditional ID-based recommender systems often struggle with cold-start and generalization challenges. Multimodal recommendation systems, which leverage textual and visual data, offer a promising solution to mitigate these issues. However, existing industrial approaches typically adopt a two-stage training paradigm: first pretraining a multimodal model, then applying its frozen representations to train the recommendation model. This decoupled framework suffers from misalignment between multimodal learning and recommendation objectives, as well as an inability to adapt dynamically to new data. To address these limitations, we propose LEMUR, the first large-scale multimodal recommender system trained end-to-end from raw data. By jointly optimizing both the multimodal and recommendation components, LEMUR ensures tighter alignment with downstream objectives while enabling real-time parameter updates. Constructing multimodal sequential representations from user history often entails prohibitively high computational costs. To alleviate this bottleneck, we propose a novel memory bank mechanism that incrementally accumulates historical multimodal representations throughout the training process. After one month of deployment in Douyin Search, LEMUR has led to a 0.843% reduction in query change rate decay and a 0.81% improvement in QAUC. Additionally, LEMUR has shown significant gains across key offline metrics for Douyin Advertisement. Our results validate the superiority of end-to-end multimodal recommendation in real-world industrial scenarios.
MARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
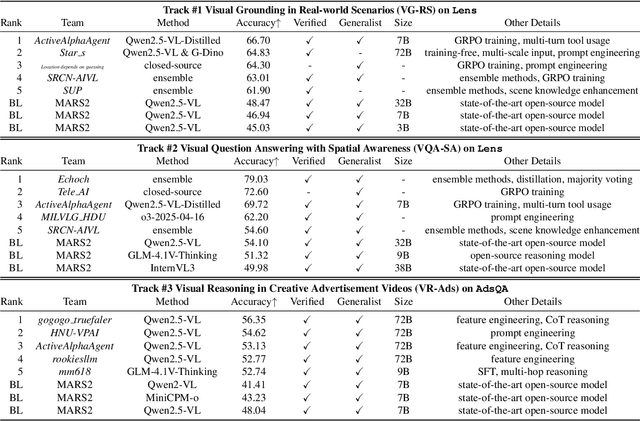

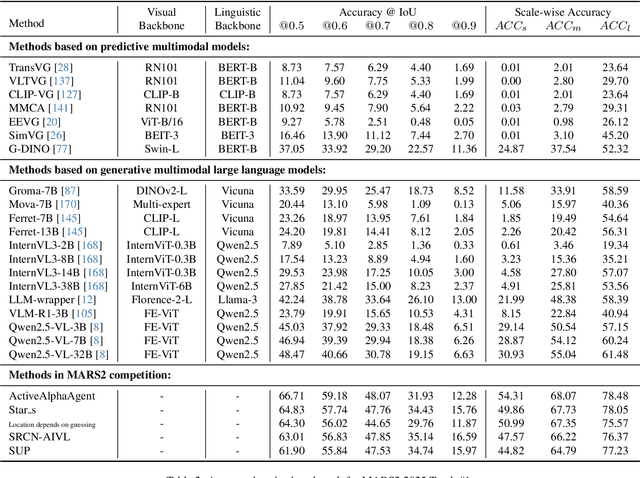
This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.
PegasusFlow: Parallel Rolling-Denoising Score Sampling for Robot Diffusion Planner Flow Matching
Sep 10, 2025Diffusion models offer powerful generative capabilities for robot trajectory planning, yet their practical deployment on robots is hindered by a critical bottleneck: a reliance on imitation learning from expert demonstrations. This paradigm is often impractical for specialized robots where data is scarce and creates an inefficient, theoretically suboptimal training pipeline. To overcome this, we introduce PegasusFlow, a hierarchical rolling-denoising framework that enables direct and parallel sampling of trajectory score gradients from environmental interaction, completely bypassing the need for expert data. Our core innovation is a novel sampling algorithm, Weighted Basis Function Optimization (WBFO), which leverages spline basis representations to achieve superior sample efficiency and faster convergence compared to traditional methods like MPPI. The framework is embedded within a scalable, asynchronous parallel simulation architecture that supports massively parallel rollouts for efficient data collection. Extensive experiments on trajectory optimization and robotic navigation tasks demonstrate that our approach, particularly Action-Value WBFO (AVWBFO) combined with a reinforcement learning warm-start, significantly outperforms baselines. In a challenging barrier-crossing task, our method achieved a 100% success rate and was 18% faster than the next-best method, validating its effectiveness for complex terrain locomotion planning. https://masteryip.github.io/pegasusflow.github.io/
AdsQA: Towards Advertisement Video Understanding
Sep 10, 2025Large language models (LLMs) have taken a great step towards AGI. Meanwhile, an increasing number of domain-specific problems such as math and programming boost these general-purpose models to continuously evolve via learning deeper expertise. Now is thus the time further to extend the diversity of specialized applications for knowledgeable LLMs, though collecting high quality data with unexpected and informative tasks is challenging. In this paper, we propose to use advertisement (ad) videos as a challenging test-bed to probe the ability of LLMs in perceiving beyond the objective physical content of common visual domain. Our motivation is to take full advantage of the clue-rich and information-dense ad videos' traits, e.g., marketing logic, persuasive strategies, and audience engagement. Our contribution is three-fold: (1) To our knowledge, this is the first attempt to use ad videos with well-designed tasks to evaluate LLMs. We contribute AdsQA, a challenging ad Video QA benchmark derived from 1,544 ad videos with 10,962 clips, totaling 22.7 hours, providing 5 challenging tasks. (2) We propose ReAd-R, a Deepseek-R1 styled RL model that reflects on questions, and generates answers via reward-driven optimization. (3) We benchmark 14 top-tier LLMs on AdsQA, and our \texttt{ReAd-R}~achieves the state-of-the-art outperforming strong competitors equipped with long-chain reasoning capabilities by a clear margin.
From Feedback to Checklists: Grounded Evaluation of AI-Generated Clinical Notes
Jul 23, 2025



AI-generated clinical notes are increasingly used in healthcare, but evaluating their quality remains a challenge due to high subjectivity and limited scalability of expert review. Existing automated metrics often fail to align with real-world physician preferences. To address this, we propose a pipeline that systematically distills real user feedback into structured checklists for note evaluation. These checklists are designed to be interpretable, grounded in human feedback, and enforceable by LLM-based evaluators. Using deidentified data from over 21,000 clinical encounters, prepared in accordance with the HIPAA safe harbor standard, from a deployed AI medical scribe system, we show that our feedback-derived checklist outperforms baseline approaches in our offline evaluations in coverage, diversity, and predictive power for human ratings. Extensive experiments confirm the checklist's robustness to quality-degrading perturbations, significant alignment with clinician preferences, and practical value as an evaluation methodology. In offline research settings, the checklist can help identify notes likely to fall below our chosen quality thresholds.
Whole-Body Constrained Learning for Legged Locomotion via Hierarchical Optimization
Jun 05, 2025Reinforcement learning (RL) has demonstrated impressive performance in legged locomotion over various challenging environments. However, due to the sim-to-real gap and lack of explainability, unconstrained RL policies deployed in the real world still suffer from inevitable safety issues, such as joint collisions, excessive torque, or foot slippage in low-friction environments. These problems limit its usage in missions with strict safety requirements, such as planetary exploration, nuclear facility inspection, and deep-sea operations. In this paper, we design a hierarchical optimization-based whole-body follower, which integrates both hard and soft constraints into RL framework to make the robot move with better safety guarantees. Leveraging the advantages of model-based control, our approach allows for the definition of various types of hard and soft constraints during training or deployment, which allows for policy fine-tuning and mitigates the challenges of sim-to-real transfer. Meanwhile, it preserves the robustness of RL when dealing with locomotion in complex unstructured environments. The trained policy with introduced constraints was deployed in a hexapod robot and tested in various outdoor environments, including snow-covered slopes and stairs, demonstrating the great traversability and safety of our approach.
No Free Lunch: Non-Asymptotic Analysis of Prediction-Powered Inference
May 26, 2025Prediction-Powered Inference (PPI) is a popular strategy for combining gold-standard and possibly noisy pseudo-labels to perform statistical estimation. Prior work has shown an asymptotic "free lunch" for PPI++, an adaptive form of PPI, showing that the *asymptotic* variance of PPI++ is always less than or equal to the variance obtained from using gold-standard labels alone. Notably, this result holds *regardless of the quality of the pseudo-labels*. In this work, we demystify this result by conducting an exact finite-sample analysis of the estimation error of PPI++ on the mean estimation problem. We give a "no free lunch" result, characterizing the settings (and sample sizes) where PPI++ has provably worse estimation error than using gold-standard labels alone. Specifically, PPI++ will outperform if and only if the correlation between pseudo- and gold-standard is above a certain level that depends on the number of labeled samples ($n$). In some cases our results simplify considerably: For Gaussian data, the correlation must be at least $1/\sqrt{n - 2}$ in order to see improvement, and a similar result holds for binary labels. In experiments, we illustrate that our theoretical findings hold on real-world datasets, and give insights into trade-offs between single-sample and sample-splitting variants of PPI++.
VTBench: Comprehensive Benchmark Suite Towards Real-World Virtual Try-on Models
May 26, 2025While virtual try-on has achieved significant progress, evaluating these models towards real-world scenarios remains a challenge. A comprehensive benchmark is essential for three key reasons:(1) Current metrics inadequately reflect human perception, particularly in unpaired try-on settings;(2)Most existing test sets are limited to indoor scenarios, lacking complexity for real-world evaluation; and (3) An ideal system should guide future advancements in virtual try-on generation. To address these needs, we introduce VTBench, a hierarchical benchmark suite that systematically decomposes virtual image try-on into hierarchical, disentangled dimensions, each equipped with tailored test sets and evaluation criteria. VTBench exhibits three key advantages:1) Multi-Dimensional Evaluation Framework: The benchmark encompasses five critical dimensions for virtual try-on generation (e.g., overall image quality, texture preservation, complex background consistency, cross-category size adaptability, and hand-occlusion handling). Granular evaluation metrics of corresponding test sets pinpoint model capabilities and limitations across diverse, challenging scenarios.2) Human Alignment: Human preference annotations are provided for each test set, ensuring the benchmark's alignment with perceptual quality across all evaluation dimensions. (3) Valuable Insights: Beyond standard indoor settings, we analyze model performance variations across dimensions and investigate the disparity between indoor and real-world try-on scenarios. To foster the field of virtual try-on towards challenging real-world scenario, VTBench will be open-sourced, including all test sets, evaluation protocols, generated results, and human annotations.
AceReason-Nemotron: Advancing Math and Code Reasoning through Reinforcement Learning
May 22, 2025Despite recent progress in large-scale reinforcement learning (RL) for reasoning, the training recipe for building high-performing reasoning models remains elusive. Key implementation details of frontier models, such as DeepSeek-R1, including data curation strategies and RL training recipe, are often omitted. Moreover, recent research indicates distillation remains more effective than RL for smaller models. In this work, we demonstrate that large-scale RL can significantly enhance the reasoning capabilities of strong, small- and mid-sized models, achieving results that surpass those of state-of-the-art distillation-based models. We systematically study the RL training process through extensive ablations and propose a simple yet effective approach: first training on math-only prompts, then on code-only prompts. Notably, we find that math-only RL not only significantly enhances the performance of strong distilled models on math benchmarks (e.g., +14.6% / +17.2% on AIME 2025 for the 7B / 14B models), but also code reasoning tasks (e.g., +6.8% / +5.8% on LiveCodeBench for the 7B / 14B models). In addition, extended code-only RL iterations further improve performance on code benchmarks with minimal or no degradation in math results. We develop a robust data curation pipeline to collect challenging prompts with high-quality, verifiable answers and test cases to enable verification-based RL across both domains. Finally, we identify key experimental insights, including curriculum learning with progressively increasing response lengths and the stabilizing effect of on-policy parameter updates. We find that RL not only elicits the foundational reasoning capabilities acquired during pretraining and supervised fine-tuning (e.g., distillation), but also pushes the limits of the model's reasoning ability, enabling it to solve problems that were previously unsolvable.