 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUltra Lowrate Image Compression with Semantic Residual Coding and Compression-aware Diffusion
May 13, 2025



Existing multimodal large model-based image compression frameworks often rely on a fragmented integration of semantic retrieval, latent compression, and generative models, resulting in suboptimal performance in both reconstruction fidelity and coding efficiency. To address these challenges, we propose a residual-guided ultra lowrate image compression named ResULIC, which incorporates residual signals into both semantic retrieval and the diffusion-based generation process. Specifically, we introduce Semantic Residual Coding (SRC) to capture the semantic disparity between the original image and its compressed latent representation. A perceptual fidelity optimizer is further applied for superior reconstruction quality. Additionally, we present the Compression-aware Diffusion Model (CDM), which establishes an optimal alignment between bitrates and diffusion time steps, improving compression-reconstruction synergy. Extensive experiments demonstrate the effectiveness of ResULIC, achieving superior objective and subjective performance compared to state-of-the-art diffusion-based methods with - 80.7%, -66.3% BD-rate saving in terms of LPIPS and FID. Project page is available at https: //njuvision.github.io/ResULIC/.
ManipDreamer: Boosting Robotic Manipulation World Model with Action Tree and Visual Guidance
Apr 23, 2025



While recent advancements in robotic manipulation video synthesis have shown promise, significant challenges persist in ensuring effective instruction-following and achieving high visual quality. Recent methods, like RoboDreamer, utilize linguistic decomposition to divide instructions into separate lower-level primitives, conditioning the world model on these primitives to achieve compositional instruction-following. However, these separate primitives do not consider the relationships that exist between them. Furthermore, recent methods neglect valuable visual guidance, including depth and semantic guidance, both crucial for enhancing visual quality. This paper introduces ManipDreamer, an advanced world model based on the action tree and visual guidance. To better learn the relationships between instruction primitives, we represent the instruction as the action tree and assign embeddings to tree nodes, each instruction can acquire its embeddings by navigating through the action tree. The instruction embeddings can be used to guide the world model. To enhance visual quality, we combine depth and semantic guidance by introducing a visual guidance adapter compatible with the world model. This visual adapter enhances both the temporal and physical consistency of video generation. Based on the action tree and visual guidance, ManipDreamer significantly boosts the instruction-following ability and visual quality. Comprehensive evaluations on robotic manipulation benchmarks reveal that ManipDreamer achieves large improvements in video quality metrics in both seen and unseen tasks, with PSNR improved from 19.55 to 21.05, SSIM improved from 0.7474 to 0.7982 and reduced Flow Error from 3.506 to 3.201 in unseen tasks, compared to the recent RoboDreamer model. Additionally, our method increases the success rate of robotic manipulation tasks by 2.5% in 6 RLbench tasks on average.
VGNC: Reducing the Overfitting of Sparse-view 3DGS via Validation-guided Gaussian Number Control
Apr 20, 2025Sparse-view 3D reconstruction is a fundamental yet challenging task in practical 3D reconstruction applications. Recently, many methods based on the 3D Gaussian Splatting (3DGS) framework have been proposed to address sparse-view 3D reconstruction. Although these methods have made considerable advancements, they still show significant issues with overfitting. To reduce the overfitting, we introduce VGNC, a novel Validation-guided Gaussian Number Control (VGNC) approach based on generative novel view synthesis (NVS) models. To the best of our knowledge, this is the first attempt to alleviate the overfitting issue of sparse-view 3DGS with generative validation images. Specifically, we first introduce a validation image generation method based on a generative NVS model. We then propose a Gaussian number control strategy that utilizes generated validation images to determine the optimal Gaussian numbers, thereby reducing the issue of overfitting. We conducted detailed experiments on various sparse-view 3DGS baselines and datasets to evaluate the effectiveness of VGNC. Extensive experiments show that our approach not only reduces overfitting but also improves rendering quality on the test set while decreasing the number of Gaussian points. This reduction lowers storage demands and accelerates both training and rendering. The code will be released.
EmbodiedOcc++: Boosting Embodied 3D Occupancy Prediction with Plane Regularization and Uncertainty Sampler
Apr 13, 2025Online 3D occupancy prediction provides a comprehensive spatial understanding of embodied environments. While the innovative EmbodiedOcc framework utilizes 3D semantic Gaussians for progressive indoor occupancy prediction, it overlooks the geometric characteristics of indoor environments, which are primarily characterized by planar structures. This paper introduces EmbodiedOcc++, enhancing the original framework with two key innovations: a Geometry-guided Refinement Module (GRM) that constrains Gaussian updates through plane regularization, along with a Semantic-aware Uncertainty Sampler (SUS) that enables more effective updates in overlapping regions between consecutive frames. GRM regularizes the position update to align with surface normals. It determines the adaptive regularization weight using curvature-based and depth-based constraints, allowing semantic Gaussians to align accurately with planar surfaces while adapting in complex regions. To effectively improve geometric consistency from different views, SUS adaptively selects proper Gaussians to update. Comprehensive experiments on the EmbodiedOcc-ScanNet benchmark demonstrate that EmbodiedOcc++ achieves state-of-the-art performance across different settings. Our method demonstrates improved edge accuracy and retains more geometric details while ensuring computational efficiency, which is essential for online embodied perception. The code will be released at: https://github.com/PKUHaoWang/EmbodiedOcc2.
TimeSearch: Hierarchical Video Search with Spotlight and Reflection for Human-like Long Video Understanding
Apr 02, 2025


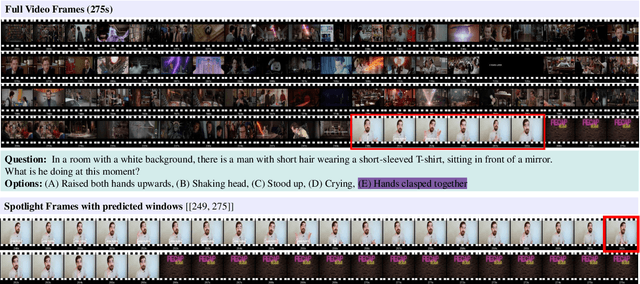
Large video-language models (LVLMs) have shown remarkable performance across various video-language tasks. However, they encounter significant challenges when processing long videos because of the large number of video frames involved. Downsampling long videos in either space or time can lead to visual hallucinations, making it difficult to accurately interpret long videos. Motivated by human hierarchical temporal search strategies, we propose \textbf{TimeSearch}, a novel framework enabling LVLMs to understand long videos in a human-like manner. TimeSearch integrates two human-like primitives into a unified autoregressive LVLM: 1) \textbf{Spotlight} efficiently identifies relevant temporal events through a Temporal-Augmented Frame Representation (TAFR), explicitly binding visual features with timestamps; 2) \textbf{Reflection} evaluates the correctness of the identified events, leveraging the inherent temporal self-reflection capabilities of LVLMs. TimeSearch progressively explores key events and prioritizes temporal search based on reflection confidence. Extensive experiments on challenging long-video benchmarks confirm that TimeSearch substantially surpasses previous state-of-the-art, improving the accuracy from 41.8\% to 51.5\% on the LVBench. Additionally, experiments on temporal grounding demonstrate that appropriate TAFR is adequate to effectively stimulate the surprising temporal grounding ability of LVLMs in a simpler yet versatile manner, which improves mIoU on Charades-STA by 11.8\%. The code will be released.
CoGen: 3D Consistent Video Generation via Adaptive Conditioning for Autonomous Driving
Mar 28, 2025Recent progress in driving video generation has shown significant potential for enhancing self-driving systems by providing scalable and controllable training data. Although pretrained state-of-the-art generation models, guided by 2D layout conditions (e.g., HD maps and bounding boxes), can produce photorealistic driving videos, achieving controllable multi-view videos with high 3D consistency remains a major challenge. To tackle this, we introduce a novel spatial adaptive generation framework, CoGen, which leverages advances in 3D generation to improve performance in two key aspects: (i) To ensure 3D consistency, we first generate high-quality, controllable 3D conditions that capture the geometry of driving scenes. By replacing coarse 2D conditions with these fine-grained 3D representations, our approach significantly enhances the spatial consistency of the generated videos. (ii) Additionally, we introduce a consistency adapter module to strengthen the robustness of the model to multi-condition control. The results demonstrate that this method excels in preserving geometric fidelity and visual realism, offering a reliable video generation solution for autonomous driving.
Concept-as-Tree: Synthetic Data is All You Need for VLM Personalization
Mar 17, 2025Vision-Language Models (VLMs) have demonstrated exceptional performance in various multi-modal tasks. Recently, there has been an increasing interest in improving the personalization capabilities of VLMs. To better integrate user-provided concepts into VLMs, many methods use positive and negative samples to fine-tune these models. However, the scarcity of user-provided positive samples and the low quality of retrieved negative samples pose challenges for fine-tuning. To reveal the relationship between sample and model performance, we systematically investigate the impact of positive and negative samples (easy and hard) and their diversity on VLM personalization tasks. Based on the detailed analysis, we introduce Concept-as-Tree (CaT), which represents a concept as a tree structure, thereby enabling the data generation of positive and negative samples with varying difficulty and diversity for VLM personalization. With a well-designed data filtering strategy, our CaT framework can ensure the quality of generated data, constituting a powerful pipeline. We perform thorough experiments with various VLM personalization baselines to assess the effectiveness of the pipeline, alleviating the lack of positive samples and the low quality of negative samples. Our results demonstrate that CaT equipped with the proposed data filter significantly enhances the personalization capabilities of VLMs across the MyVLM, Yo'LLaVA, and MC-LLaVA datasets. To our knowledge, this work is the first controllable synthetic data pipeline for VLM personalization. The code is released at \href{https://github.com/zengkaiya/CaT}{https://github.com/zengkaiya/CaT}.
On Quantizing Neural Representation for Variable-Rate Video Coding
Feb 17, 2025This work introduces NeuroQuant, a novel post-training quantization (PTQ) approach tailored to non-generalized Implicit Neural Representations for variable-rate Video Coding (INR-VC). Unlike existing methods that require extensive weight retraining for each target bitrate, we hypothesize that variable-rate coding can be achieved by adjusting quantization parameters (QPs) of pre-trained weights. Our study reveals that traditional quantization methods, which assume inter-layer independence, are ineffective for non-generalized INR-VC models due to significant dependencies across layers. To address this, we redefine variable-rate INR-VC as a mixed-precision quantization problem and establish a theoretical framework for sensitivity criteria aimed at simplified, fine-grained rate control. Additionally, we propose network-wise calibration and channel-wise quantization strategies to minimize quantization-induced errors, arriving at a unified formula for representation-oriented PTQ calibration. Our experimental evaluations demonstrate that NeuroQuant significantly outperforms existing techniques in varying bitwidth quantization and compression efficiency, accelerating encoding by up to eight times and enabling quantization down to INT2 with minimal reconstruction loss. This work introduces variable-rate INR-VC for the first time and lays a theoretical foundation for future research in rate-distortion optimization, advancing the field of video coding technology. The materials will be available at https://github.com/Eric-qi/NeuroQuant.
CMamba: Learned Image Compression with State Space Models
Feb 07, 2025Learned Image Compression (LIC) has explored various architectures, such as Convolutional Neural Networks (CNNs) and transformers, in modeling image content distributions in order to achieve compression effectiveness. However, achieving high rate-distortion performance while maintaining low computational complexity (\ie, parameters, FLOPs, and latency) remains challenging. In this paper, we propose a hybrid Convolution and State Space Models (SSMs) based image compression framework, termed \textit{CMamba}, to achieve superior rate-distortion performance with low computational complexity. Specifically, CMamba introduces two key components: a Content-Adaptive SSM (CA-SSM) module and a Context-Aware Entropy (CAE) module. First, we observed that SSMs excel in modeling overall content but tend to lose high-frequency details. In contrast, CNNs are proficient at capturing local details. Motivated by this, we propose the CA-SSM module that can dynamically fuse global content extracted by SSM blocks and local details captured by CNN blocks in both encoding and decoding stages. As a result, important image content is well preserved during compression. Second, our proposed CAE module is designed to reduce spatial and channel redundancies in latent representations after encoding. Specifically, our CAE leverages SSMs to parameterize the spatial content in latent representations. Benefiting from SSMs, CAE significantly improves spatial compression efficiency while reducing spatial content redundancies. Moreover, along the channel dimension, CAE reduces inter-channel redundancies of latent representations via an autoregressive manner, which can fully exploit prior knowledge from previous channels without sacrificing efficiency. Experimental results demonstrate that CMamba achieves superior rate-distortion performance.
SliceOcc: Indoor 3D Semantic Occupancy Prediction with Vertical Slice Representation
Jan 28, 2025



3D semantic occupancy prediction is a crucial task in visual perception, as it requires the simultaneous comprehension of both scene geometry and semantics. It plays a crucial role in understanding 3D scenes and has great potential for various applications, such as robotic vision perception and autonomous driving. Many existing works utilize planar-based representations such as Bird's Eye View (BEV) and Tri-Perspective View (TPV). These representations aim to simplify the complexity of 3D scenes while preserving essential object information, thereby facilitating efficient scene representation. However, in dense indoor environments with prevalent occlusions, directly applying these planar-based methods often leads to difficulties in capturing global semantic occupancy, ultimately degrading model performance. In this paper, we present a new vertical slice representation that divides the scene along the vertical axis and projects spatial point features onto the nearest pair of parallel planes. To utilize these slice features, we propose SliceOcc, an RGB camera-based model specifically tailored for indoor 3D semantic occupancy prediction. SliceOcc utilizes pairs of slice queries and cross-attention mechanisms to extract planar features from input images. These local planar features are then fused to form a global scene representation, which is employed for indoor occupancy prediction. Experimental results on the EmbodiedScan dataset demonstrate that SliceOcc achieves a mIoU of 15.45% across 81 indoor categories, setting a new state-of-the-art performance among RGB camera-based models for indoor 3D semantic occupancy prediction. Code is available at https://github.com/NorthSummer/SliceOcc.