 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvoVid: Temporal-Centric Self-Evolution for Video Large Language Models
May 21, 2026Recent Video Large Language Models (Video-LLMs) have demonstrated strong capabilities in video reasoning through reinforcement learning (RL). However, existing RL pipelines rely heavily on human-annotated tasks and solutions, making them costly to scale and fundamentally constrained by human expertise. Self-evolving frameworks have recently emerged as a promising alternative through autonomous Questioner-Solver self-play. Unfortunately, these approaches are primarily designed for static modalities such as text and images, fundamentally failing to capture the temporal dynamics that are central to video reasoning. In this work, we propose $\textbf{EvoVid}$, a temporal-centric self-evolving framework that enables Video-LLMs to improve directly from raw, unannotated videos. Specifically, we introduce two complementary temporal-centric rewards: a temporal-aware Questioner reward that encourages temporally dependent question generation through temporal perturbation sensitivity, and a temporal-grounded Solver reward that provides automatic temporal supervision via inherent video segment localization. Extensive experiments across four base models and six benchmarks demonstrate consistent improvements over both base models and existing self-evolving baselines, achieving competitive performance with supervised methods. These results highlight temporal-centric self-evolution as an effective and scalable paradigm for video understanding and reasoning.
TextSculptor: Training and Benchmarking Scene Text Editing
May 20, 2026Recent advances in Multimodal Large Language Models (MLLMs) and diffusion-based generative models have substantially improved prompt-driven image editing. However, scene text editing remains challenging, as it requires models to precisely modify textual content while preserving visual realism and non-target regions. Current open-source models still lag behind proprietary systems, largely due to the scarcity of high-quality training data and the lack of standardized benchmarks tailored to text editing. To address these challenges, we present TextSculptor, a comprehensive framework for data construction and evaluation of scene text editing. We first develop an automated data construction pipeline that combines text-aware image synthesis with programmatic text rendering and compositing. Based on this pipeline, we build TextSculpt-Data, a large-scale dataset containing 3.2M training samples, including 1.2M OCR-verified text-to-image samples and 2M paired text editing samples with naturally aligned source-target images and strong background consistency. We further introduce TextSculpt-Bench, a benchmark covering four fundamental text editing tasks: text addition, text replacement, text removal, and hybrid editing. To support reliable evaluation, we design a tailored protocol that measures text accuracy, visual quality, and background preservation through OCR-based text alignment, multimodal judgment, and background-region similarity. Extensive experiments show that TextSculptor improves open-source text editing performance and narrows the gap to proprietary models. The data and benchmark are available at https://github.com/linyiheng123/TextSculptor.
AD-MIR: Bridging the Gap from Perception to Persuasion in Advertising Video Understanding via Structured Reasoning
Feb 07, 2026Multimodal understanding of advertising videos is essential for interpreting the intricate relationship between visual storytelling and abstract persuasion strategies. However, despite excelling at general search, existing agents often struggle to bridge the cognitive gap between pixel-level perception and high-level marketing logic. To address this challenge, we introduce AD-MIR, a framework designed to decode advertising intent via a two-stage architecture. First, in the Structure-Aware Memory Construction phase, the system converts raw video into a structured database by integrating semantic retrieval with exact keyword matching. This approach prioritizes fine-grained brand details (e.g., logos, on-screen text) while dynamically filtering out irrelevant background noise to isolate key protagonists. Second, the Structured Reasoning Agent mimics a marketing expert through an iterative inquiry loop, decomposing the narrative to deduce implicit persuasion tactics. Crucially, it employs an evidence-based self-correction mechanism that rigorously validates these insights against specific video frames, automatically backtracking when visual support is lacking. Evaluation on the AdsQA benchmark demonstrates that AD-MIR achieves state-of-the-art performance, surpassing the strongest general-purpose agent, DVD, by 1.8% in strict and 9.5% in relaxed accuracy. These results underscore that effective advertising understanding demands explicitly grounding abstract marketing strategies in pixel-level evidence. The code is available at https://github.com/Little-Fridge/AD-MIR.
Video-KTR: Reinforcing Video Reasoning via Key Token Attribution
Jan 27, 2026Reinforcement learning (RL) has shown strong potential for enhancing reasoning in multimodal large language models, yet existing video reasoning methods often rely on coarse sequence-level rewards or single-factor token selection, neglecting fine-grained links among visual inputs, temporal dynamics, and linguistic outputs, limiting both accuracy and interpretability. We propose Video-KTR, a modality-aware policy shaping framework that performs selective, token-level RL by combining three attribution signals: (1) visual-aware tokens identified via counterfactual masking to reveal perceptual dependence; (2) temporal-aware tokens detected through frame shuffling to expose temporal sensitivity; and (3) high-entropy tokens signaling predictive uncertainty. By reinforcing only these key tokens, Video-KTR focuses learning on semantically informative, modality-sensitive content while filtering out low-value tokens. Across five challenging benchmarks, Video-KTR achieves state-of-the-art or highly competitive results, achieving 42.7\% on Video-Holmes (surpassing GPT-4o) with consistent gains on both reasoning and general video understanding tasks. Ablation studies verify the complementary roles of the attribution signals and the robustness of targeted token-level updates. Overall, Video-KTR improves accuracy and interpretability, offering a simple, drop-in extension to RL for complex video reasoning. Our code and models are available at https://github.com/zywang0104/Video-KTR.
ThinkGen: Generalized Thinking for Visual Generation
Dec 29, 2025Recent progress in Multimodal Large Language Models (MLLMs) demonstrates that Chain-of-Thought (CoT) reasoning enables systematic solutions to complex understanding tasks. However, its extension to generation tasks remains nascent and limited by scenario-specific mechanisms that hinder generalization and adaptation. In this work, we present ThinkGen, the first think-driven visual generation framework that explicitly leverages MLLM's CoT reasoning in various generation scenarios. ThinkGen employs a decoupled architecture comprising a pretrained MLLM and a Diffusion Transformer (DiT), wherein the MLLM generates tailored instructions based on user intent, and DiT produces high-quality images guided by these instructions. We further propose a separable GRPO-based training paradigm (SepGRPO), alternating reinforcement learning between the MLLM and DiT modules. This flexible design enables joint training across diverse datasets, facilitating effective CoT reasoning for a wide range of generative scenarios. Extensive experiments demonstrate that ThinkGen achieves robust, state-of-the-art performance across multiple generation benchmarks. Code is available: https://github.com/jiaosiyuu/ThinkGen
CodeDance: A Dynamic Tool-integrated MLLM for Executable Visual Reasoning
Dec 19, 2025Recent releases such as o3 highlight human-like "thinking with images" reasoning that combines structured tool use with stepwise verification, yet most open-source approaches still rely on text-only chains, rigid visual schemas, or single-step pipelines, limiting flexibility, interpretability, and transferability on complex tasks. We introduce CodeDance, which explores executable code as a general solver for visual reasoning. Unlike fixed-schema calls (e.g., only predicting bounding-box coordinates), CodeDance defines, composes, and executes code to orchestrate multiple tools, compute intermediate results, and render visual artifacts (e.g., boxes, lines, plots) that support transparent, self-checkable reasoning. To guide this process, we introduce a reward for balanced and adaptive tool-call, which balances exploration with efficiency and mitigates tool overuse. Interestingly, beyond the expected capabilities taught by atomic supervision, we empirically observe novel emergent behaviors during RL training: CodeDance demonstrates novel tool invocations, unseen compositions, and cross-task transfer. These behaviors arise without task-specific fine-tuning, suggesting a general and scalable mechanism of executable visual reasoning. Extensive experiments across reasoning benchmarks (e.g., visual search, math, chart QA) show that CodeDance not only consistently outperforms schema-driven and text-only baselines, but also surpasses advanced closed models such as GPT-4o and larger open-source models.
TimeSearch-R: Adaptive Temporal Search for Long-Form Video Understanding via Self-Verification Reinforcement Learning
Nov 07, 2025Temporal search aims to identify a minimal set of relevant frames from tens of thousands based on a given query, serving as a foundation for accurate long-form video understanding. Existing works attempt to progressively narrow the search space. However, these approaches typically rely on a hand-crafted search process, lacking end-to-end optimization for learning optimal search strategies. In this paper, we propose TimeSearch-R, which reformulates temporal search as interleaved text-video thinking, seamlessly integrating searching video clips into the reasoning process through reinforcement learning (RL). However, applying RL training methods, such as Group Relative Policy Optimization (GRPO), to video reasoning can result in unsupervised intermediate search decisions. This leads to insufficient exploration of the video content and inconsistent logical reasoning. To address these issues, we introduce GRPO with Completeness Self-Verification (GRPO-CSV), which gathers searched video frames from the interleaved reasoning process and utilizes the same policy model to verify the adequacy of searched frames, thereby improving the completeness of video reasoning. Additionally, we construct datasets specifically designed for the SFT cold-start and RL training of GRPO-CSV, filtering out samples with weak temporal dependencies to enhance task difficulty and improve temporal search capabilities. Extensive experiments demonstrate that TimeSearch-R achieves significant improvements on temporal search benchmarks such as Haystack-LVBench and Haystack-Ego4D, as well as long-form video understanding benchmarks like VideoMME and MLVU. Notably, TimeSearch-R establishes a new state-of-the-art on LongVideoBench with 4.1% improvement over the base model Qwen2.5-VL and 2.0% over the advanced video reasoning model Video-R1. Our code is available at https://github.com/Time-Search/TimeSearch-R.
Beyond Attention or Similarity: Maximizing Conditional Diversity for Token Pruning in MLLMs
Jun 12, 2025



In multimodal large language models (MLLMs), the length of input visual tokens is often significantly greater than that of their textual counterparts, leading to a high inference cost. Many works aim to address this issue by removing redundant visual tokens. However, current approaches either rely on attention-based pruning, which retains numerous duplicate tokens, or use similarity-based pruning, overlooking the instruction relevance, consequently causing suboptimal performance. In this paper, we go beyond attention or similarity by proposing a novel visual token pruning method named CDPruner, which maximizes the conditional diversity of retained tokens. We first define the conditional similarity between visual tokens conditioned on the instruction, and then reformulate the token pruning problem with determinantal point process (DPP) to maximize the conditional diversity of the selected subset. The proposed CDPruner is training-free and model-agnostic, allowing easy application to various MLLMs. Extensive experiments across diverse MLLMs show that CDPruner establishes new state-of-the-art on various vision-language benchmarks. By maximizing conditional diversity through DPP, the selected subset better represents the input images while closely adhering to user instructions, thereby preserving strong performance even with high reduction ratios. When applied to LLaVA, CDPruner reduces FLOPs by 95\% and CUDA latency by 78\%, while maintaining 94\% of the original accuracy. Our code is available at https://github.com/Theia-4869/CDPruner.
TimeSearch: Hierarchical Video Search with Spotlight and Reflection for Human-like Long Video Understanding
Apr 02, 2025


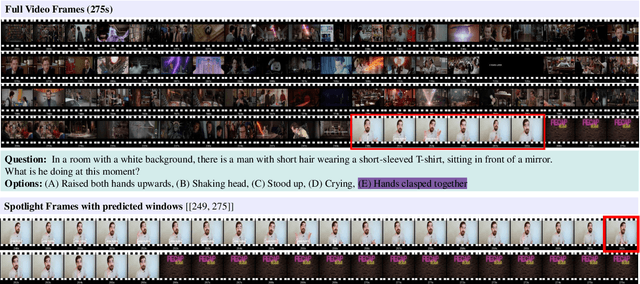
Large video-language models (LVLMs) have shown remarkable performance across various video-language tasks. However, they encounter significant challenges when processing long videos because of the large number of video frames involved. Downsampling long videos in either space or time can lead to visual hallucinations, making it difficult to accurately interpret long videos. Motivated by human hierarchical temporal search strategies, we propose \textbf{TimeSearch}, a novel framework enabling LVLMs to understand long videos in a human-like manner. TimeSearch integrates two human-like primitives into a unified autoregressive LVLM: 1) \textbf{Spotlight} efficiently identifies relevant temporal events through a Temporal-Augmented Frame Representation (TAFR), explicitly binding visual features with timestamps; 2) \textbf{Reflection} evaluates the correctness of the identified events, leveraging the inherent temporal self-reflection capabilities of LVLMs. TimeSearch progressively explores key events and prioritizes temporal search based on reflection confidence. Extensive experiments on challenging long-video benchmarks confirm that TimeSearch substantially surpasses previous state-of-the-art, improving the accuracy from 41.8\% to 51.5\% on the LVBench. Additionally, experiments on temporal grounding demonstrate that appropriate TAFR is adequate to effectively stimulate the surprising temporal grounding ability of LVLMs in a simpler yet versatile manner, which improves mIoU on Charades-STA by 11.8\%. The code will be released.
ASGDiffusion: Parallel High-Resolution Generation with Asynchronous Structure Guidance
Dec 09, 2024Training-free high-resolution (HR) image generation has garnered significant attention due to the high costs of training large diffusion models. Most existing methods begin by reconstructing the overall structure and then proceed to refine the local details. Despite their advancements, they still face issues with repetitive patterns in HR image generation. Besides, HR generation with diffusion models incurs significant computational costs. Thus, parallel generation is essential for interactive applications. To solve the above limitations, we introduce a novel method named ASGDiffusion for parallel HR generation with Asynchronous Structure Guidance (ASG) using pre-trained diffusion models. To solve the pattern repetition problem of HR image generation, ASGDiffusion leverages the low-resolution (LR) noise weighted by the attention mask as the structure guidance for the denoising step to ensure semantic consistency. The proposed structure guidance can significantly alleviate the pattern repetition problem. To enable parallel generation, we further propose a parallelism strategy, which calculates the patch noises and structure guidance asynchronously. By leveraging multi-GPU parallel acceleration, we significantly accelerate generation speed and reduce memory usage per GPU. Extensive experiments demonstrate that our method effectively and efficiently addresses common issues like pattern repetition and achieves state-of-the-art HR generation.