 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelFlexformer: Efficient Attention 3D-Transformers for Integrable Relative Positional Encodings
May 11, 2026We present a new class of efficient attention mechanisms applying universal 3D Relative Positional Encoding (RPE) methods given by arbitrary integrable modulation functions $f$. They lead to the new class of 3D-Transformer models, called \textit{RelFlexformers}, flexibly integrating those RPEs, and characterized by the $O(L \log L)$ time complexity of the attention computation for the $L$-length input sequences. RelFlexformers builds on the theory of the Non-Uniform Fourier Transform (NU-FFT), naturally generalizing several existing efficient RPE-attention methods from structured settings with tokens homogeneously embedded in unweighted grids into general non-structured heterogeneous scenarios, where tokens' positions are arbitrarily distributed in the corresponding 3D spaces. As such, RelFlexformers can be applied in particular to model point clouds. Our extensive empirical evaluation on a large portfolio of 3D datasets confirms quality improvements provided by the NU-FFT-driven attention modulation techniques in the RelFlexformers.
SWING: Unlocking Implicit Graph Representations for Graph Random Features
Feb 13, 2026We propose SWING: Space Walks for Implicit Network Graphs, a new class of algorithms for computations involving Graph Random Features on graphs given by implicit representations (i-graphs), where edge-weights are defined as bi-variate functions of feature vectors in the corresponding nodes. Those classes of graphs include several prominent examples, such as: $ε$-neighborhood graphs, used on regular basis in machine learning. Rather than conducting walks on graphs' nodes, those methods rely on walks in continuous spaces, in which those graphs are embedded. To accurately and efficiently approximate original combinatorial calculations, SWING applies customized Gumbel-softmax sampling mechanism with linearized kernels, obtained via random features coupled with importance sampling techniques. This algorithm is of its own interest. SWING relies on the deep connection between implicitly defined graphs and Fourier analysis, presented in this paper. SWING is accelerator-friendly and does not require input graph materialization. We provide detailed analysis of SWING and complement it with thorough experiments on different classes of i-graphs.
Inference-time Unlearning Using Conformal Prediction
Feb 03, 2026Machine unlearning is the process of efficiently removing specific information from a trained machine learning model without retraining from scratch. Existing unlearning methods, which often provide provable guarantees, typically involve retraining a subset of model parameters based on a forget set. While these approaches show promise in certain scenarios, their underlying assumptions are often challenged in real-world applications -- particularly when applied to generative models. Furthermore, updating parameters using these unlearning procedures often degrades the general-purpose capabilities the model acquired during pre-training. Motivated by these shortcomings, this paper considers the paradigm of inference time unlearning -- wherein, the generative model is equipped with an (approximately correct) verifier that judges whether the model's response satisfies appropriate unlearning guarantees. This paper introduces a framework that iteratively refines the quality of the generated responses using feedback from the verifier without updating the model parameters. The proposed framework leverages conformal prediction to reduce computational overhead and provide distribution-free unlearning guarantees. This paper's approach significantly outperforms existing state-of-the-art methods, reducing unlearning error by up to 93% across challenging unlearning benchmarks.
EUGens: Efficient, Unified, and General Dense Layers
Jan 30, 2026Efficient neural networks are essential for scaling machine learning models to real-time applications and resource-constrained environments. Fully-connected feedforward layers (FFLs) introduce computation and parameter count bottlenecks within neural network architectures. To address this challenge, in this work, we propose a new class of dense layers that generalize standard fully-connected feedforward layers, \textbf{E}fficient, \textbf{U}nified and \textbf{Gen}eral dense layers (EUGens). EUGens leverage random features to approximate standard FFLs and go beyond them by incorporating a direct dependence on the input norms in their computations. The proposed layers unify existing efficient FFL extensions and improve efficiency by reducing inference complexity from quadratic to linear time. They also lead to \textbf{the first} unbiased algorithms approximating FFLs with arbitrary polynomial activation functions. Furthermore, EuGens reduce the parameter count and computational overhead while preserving the expressive power and adaptability of FFLs. We also present a layer-wise knowledge transfer technique that bypasses backpropagation, enabling efficient adaptation of EUGens to pre-trained models. Empirically, we observe that integrating EUGens into Transformers and MLPs yields substantial improvements in inference speed (up to \textbf{27}\%) and memory efficiency (up to \textbf{30}\%) across a range of tasks, including image classification, language model pre-training, and 3D scene reconstruction. Overall, our results highlight the potential of EUGens for the scalable deployment of large-scale neural networks in real-world scenarios.
Computationally-efficient Graph Modeling with Refined Graph Random Features
Oct 09, 2025We propose refined GRFs (GRFs++), a new class of Graph Random Features (GRFs) for efficient and accurate computations involving kernels defined on the nodes of a graph. GRFs++ resolve some of the long-standing limitations of regular GRFs, including difficulty modeling relationships between more distant nodes. They reduce dependence on sampling long graph random walks via a novel walk-stitching technique, concatenating several shorter walks without breaking unbiasedness. By applying these techniques, GRFs++ inherit the approximation quality provided by longer walks but with greater efficiency, trading sequential, inefficient sampling of a long walk for parallel computation of short walks and matrix-matrix multiplication. Furthermore, GRFs++ extend the simplistic GRFs walk termination mechanism (Bernoulli schemes with fixed halting probabilities) to a broader class of strategies, applying general distributions on the walks' lengths. This improves the approximation accuracy of graph kernels, without incurring extra computational cost. We provide empirical evaluations to showcase all our claims and complement our results with theoretical analysis.
Fundamental Limits of Perfect Concept Erasure
Mar 25, 2025Concept erasure is the task of erasing information about a concept (e.g., gender or race) from a representation set while retaining the maximum possible utility -- information from original representations. Concept erasure is useful in several applications, such as removing sensitive concepts to achieve fairness and interpreting the impact of specific concepts on a model's performance. Previous concept erasure techniques have prioritized robustly erasing concepts over retaining the utility of the resultant representations. However, there seems to be an inherent tradeoff between erasure and retaining utility, making it unclear how to achieve perfect concept erasure while maintaining high utility. In this paper, we offer a fresh perspective toward solving this problem by quantifying the fundamental limits of concept erasure through an information-theoretic lens. Using these results, we investigate constraints on the data distribution and the erasure functions required to achieve the limits of perfect concept erasure. Empirically, we show that the derived erasure functions achieve the optimal theoretical bounds. Additionally, we show that our approach outperforms existing methods on a range of synthetic and real-world datasets using GPT-4 representations.
Learning the RoPEs: Better 2D and 3D Position Encodings with STRING
Feb 04, 2025
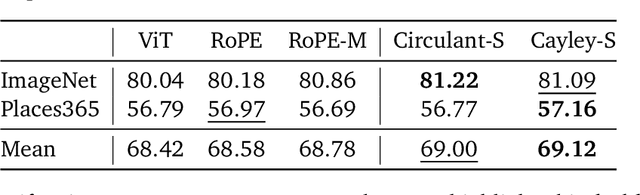
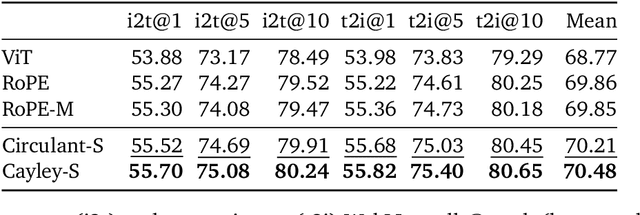
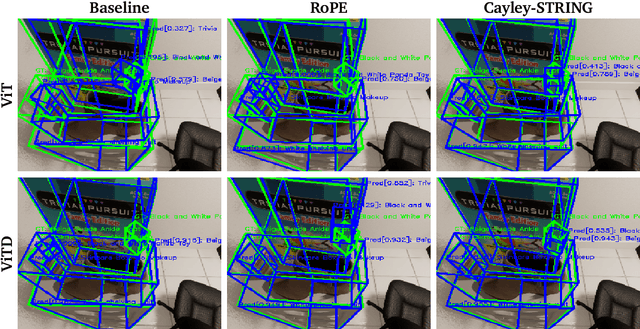
We introduce STRING: Separable Translationally Invariant Position Encodings. STRING extends Rotary Position Encodings, a recently proposed and widely used algorithm in large language models, via a unifying theoretical framework. Importantly, STRING still provides exact translation invariance, including token coordinates of arbitrary dimensionality, whilst maintaining a low computational footprint. These properties are especially important in robotics, where efficient 3D token representation is key. We integrate STRING into Vision Transformers with RGB(-D) inputs (color plus optional depth), showing substantial gains, e.g. in open-vocabulary object detection and for robotics controllers. We complement our experiments with a rigorous mathematical analysis, proving the universality of our methods.
Optimal Time Complexity Algorithms for Computing General Random Walk Graph Kernels on Sparse Graphs
Oct 15, 2024We present the first linear time complexity randomized algorithms for unbiased approximation of the celebrated family of general random walk kernels (RWKs) for sparse graphs. This includes both labelled and unlabelled instances. The previous fastest methods for general RWKs were of cubic time complexity and not applicable to labelled graphs. Our method samples dependent random walks to compute novel graph embeddings in $\mathbb{R}^d$ whose dot product is equal to the true RWK in expectation. It does so without instantiating the direct product graph in memory, meaning we can scale to massive datasets that cannot be stored on a single machine. We derive exponential concentration bounds to prove that our estimator is sharp, and show that the ability to approximate general RWKs (rather than just special cases) unlocks efficient implicit graph kernel learning. Our method is up to $\mathbf{27\times}$ faster than its counterparts for efficient computation on large graphs and scales to graphs $\mathbf{128 \times}$ bigger than largest examples amenable to brute-force computation.
Magnituder Layers for Implicit Neural Representations in 3D
Oct 13, 2024



Improving the efficiency and performance of implicit neural representations in 3D, particularly Neural Radiance Fields (NeRF) and Signed Distance Fields (SDF) is crucial for enabling their use in real-time applications. These models, while capable of generating photo-realistic novel views and detailed 3D reconstructions, often suffer from high computational costs and slow inference times. To address this, we introduce a novel neural network layer called the "magnituder", designed to reduce the number of training parameters in these models without sacrificing their expressive power. By integrating magnituders into standard feed-forward layer stacks, we achieve improved inference speed and adaptability. Furthermore, our approach enables a zero-shot performance boost in trained implicit neural representation models through layer-wise knowledge transfer without backpropagation, leading to more efficient scene reconstruction in dynamic environments.
Conditioned Language Policy: A General Framework for Steerable Multi-Objective Finetuning
Jul 22, 2024



Reward-based finetuning is crucial for aligning language policies with intended behaviors (e.g., creativity and safety). A key challenge here is to develop steerable language models that trade-off multiple (conflicting) objectives in a flexible and efficient manner. This paper presents Conditioned Language Policy (CLP), a general framework for finetuning language models on multiple objectives. Building on techniques from multi-task training and parameter-efficient finetuning, CLP can learn steerable models that effectively trade-off conflicting objectives at inference time. Notably, this does not require training or maintaining multiple models to achieve different trade-offs between the objectives. Through an extensive set of experiments and ablations, we show that the CLP framework learns steerable models that outperform and Pareto-dominate the current state-of-the-art approaches for multi-objective finetuning.