 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisGym: Diverse, Customizable, Scalable Environments for Multimodal Agents
Jan 23, 2026Modern Vision-Language Models (VLMs) remain poorly characterized in multi-step visual interactions, particularly in how they integrate perception, memory, and action over long horizons. We introduce VisGym, a gymnasium of 17 environments for evaluating and training VLMs. The suite spans symbolic puzzles, real-image understanding, navigation, and manipulation, and provides flexible controls over difficulty, input representation, planning horizon, and feedback. We also provide multi-step solvers that generate structured demonstrations, enabling supervised finetuning. Our evaluations show that all frontier models struggle in interactive settings, achieving low success rates in both the easy (46.6%) and hard (26.0%) configurations. Our experiments reveal notable limitations: models struggle to effectively leverage long context, performing worse with an unbounded history than with truncated windows. Furthermore, we find that several text-based symbolic tasks become substantially harder once rendered visually. However, explicit goal observations, textual feedback, and exploratory demonstrations in partially observable or unknown-dynamics settings for supervised finetuning yield consistent gains, highlighting concrete failure modes and pathways for improving multi-step visual decision-making. Code, data, and models can be found at: https://visgym.github.io/.
Robo-DM: Data Management For Large Robot Datasets
May 21, 2025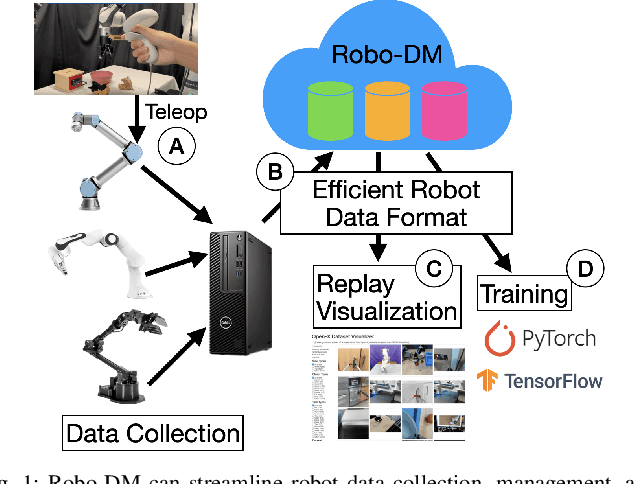
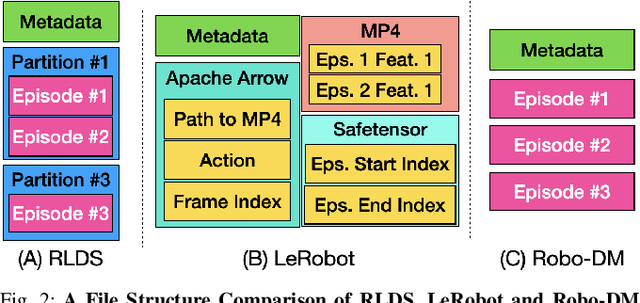
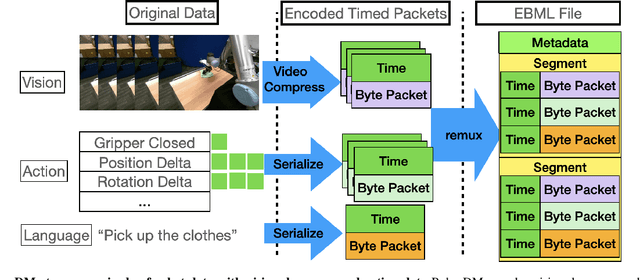
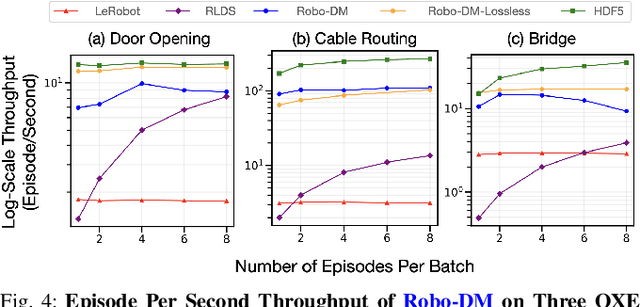
Recent results suggest that very large datasets of teleoperated robot demonstrations can be used to train transformer-based models that have the potential to generalize to new scenes, robots, and tasks. However, curating, distributing, and loading large datasets of robot trajectories, which typically consist of video, textual, and numerical modalities - including streams from multiple cameras - remains challenging. We propose Robo-DM, an efficient open-source cloud-based data management toolkit for collecting, sharing, and learning with robot data. With Robo-DM, robot datasets are stored in a self-contained format with Extensible Binary Meta Language (EBML). Robo-DM can significantly reduce the size of robot trajectory data, transfer costs, and data load time during training. Compared to the RLDS format used in OXE datasets, Robo-DM's compression saves space by up to 70x (lossy) and 3.5x (lossless). Robo-DM also accelerates data retrieval by load-balancing video decoding with memory-mapped decoding caches. Compared to LeRobot, a framework that also uses lossy video compression, Robo-DM is up to 50x faster when decoding sequentially. We physically evaluate a model trained by Robo-DM with lossy compression, a pick-and-place task, and In-Context Robot Transformer. Robo-DM uses 75x compression of the original dataset and does not suffer reduction in downstream task accuracy.
Real2Render2Real: Scaling Robot Data Without Dynamics Simulation or Robot Hardware
May 14, 2025



Scaling robot learning requires vast and diverse datasets. Yet the prevailing data collection paradigm-human teleoperation-remains costly and constrained by manual effort and physical robot access. We introduce Real2Render2Real (R2R2R), a novel approach for generating robot training data without relying on object dynamics simulation or teleoperation of robot hardware. The input is a smartphone-captured scan of one or more objects and a single video of a human demonstration. R2R2R renders thousands of high visual fidelity robot-agnostic demonstrations by reconstructing detailed 3D object geometry and appearance, and tracking 6-DoF object motion. R2R2R uses 3D Gaussian Splatting (3DGS) to enable flexible asset generation and trajectory synthesis for both rigid and articulated objects, converting these representations to meshes to maintain compatibility with scalable rendering engines like IsaacLab but with collision modeling off. Robot demonstration data generated by R2R2R integrates directly with models that operate on robot proprioceptive states and image observations, such as vision-language-action models (VLA) and imitation learning policies. Physical experiments suggest that models trained on R2R2R data from a single human demonstration can match the performance of models trained on 150 human teleoperation demonstrations. Project page: https://real2render2real.com
OTTER: A Vision-Language-Action Model with Text-Aware Visual Feature Extraction
Mar 05, 2025



Vision-Language-Action (VLA) models aim to predict robotic actions based on visual observations and language instructions. Existing approaches require fine-tuning pre-trained visionlanguage models (VLMs) as visual and language features are independently fed into downstream policies, degrading the pre-trained semantic alignments. We propose OTTER, a novel VLA architecture that leverages these existing alignments through explicit, text-aware visual feature extraction. Instead of processing all visual features, OTTER selectively extracts and passes only task-relevant visual features that are semantically aligned with the language instruction to the policy transformer. This allows OTTER to keep the pre-trained vision-language encoders frozen. Thereby, OTTER preserves and utilizes the rich semantic understanding learned from large-scale pre-training, enabling strong zero-shot generalization capabilities. In simulation and real-world experiments, OTTER significantly outperforms existing VLA models, demonstrating strong zeroshot generalization to novel objects and environments. Video, code, checkpoints, and dataset: https://ottervla.github.io/.
Blox-Net: Generative Design-for-Robot-Assembly Using VLM Supervision, Physics Simulation, and a Robot with Reset
Sep 25, 2024



Generative AI systems have shown impressive capabilities in creating text, code, and images. Inspired by the rich history of research in industrial ''Design for Assembly'', we introduce a novel problem: Generative Design-for-Robot-Assembly (GDfRA). The task is to generate an assembly based on a natural language prompt (e.g., ''giraffe'') and an image of available physical components, such as 3D-printed blocks. The output is an assembly, a spatial arrangement of these components, and instructions for a robot to build this assembly. The output must 1) resemble the requested object and 2) be reliably assembled by a 6 DoF robot arm with a suction gripper. We then present Blox-Net, a GDfRA system that combines generative vision language models with well-established methods in computer vision, simulation, perturbation analysis, motion planning, and physical robot experimentation to solve a class of GDfRA problems with minimal human supervision. Blox-Net achieved a Top-1 accuracy of 63.5% in the ''recognizability'' of its designed assemblies (eg, resembling giraffe as judged by a VLM). These designs, after automated perturbation redesign, were reliably assembled by a robot, achieving near-perfect success across 10 consecutive assembly iterations with human intervention only during reset prior to assembly. Surprisingly, this entire design process from textual word (''giraffe'') to reliable physical assembly is performed with zero human intervention.
In-Context Imitation Learning via Next-Token Prediction
Aug 28, 2024



We explore how to enhance next-token prediction models to perform in-context imitation learning on a real robot, where the robot executes new tasks by interpreting contextual information provided during the input phase, without updating its underlying policy parameters. We propose In-Context Robot Transformer (ICRT), a causal transformer that performs autoregressive prediction on sensorimotor trajectories without relying on any linguistic data or reward function. This formulation enables flexible and training-free execution of new tasks at test time, achieved by prompting the model with sensorimotor trajectories of the new task composing of image observations, actions and states tuples, collected through human teleoperation. Experiments with a Franka Emika robot demonstrate that the ICRT can adapt to new tasks specified by prompts, even in environment configurations that differ from both the prompt and the training data. In a multitask environment setup, ICRT significantly outperforms current state-of-the-art next-token prediction models in robotics on generalizing to unseen tasks. Code, checkpoints and data are available on https://icrt.dev/
Lifelong LERF: Local 3D Semantic Inventory Monitoring Using FogROS2
Mar 15, 2024



Inventory monitoring in homes, factories, and retail stores relies on maintaining data despite objects being swapped, added, removed, or moved. We introduce Lifelong LERF, a method that allows a mobile robot with minimal compute to jointly optimize a dense language and geometric representation of its surroundings. Lifelong LERF maintains this representation over time by detecting semantic changes and selectively updating these regions of the environment, avoiding the need to exhaustively remap. Human users can query inventory by providing natural language queries and receiving a 3D heatmap of potential object locations. To manage the computational load, we use Fog-ROS2, a cloud robotics platform, to offload resource-intensive tasks. Lifelong LERF obtains poses from a monocular RGBD SLAM backend, and uses these poses to progressively optimize a Language Embedded Radiance Field (LERF) for semantic monitoring. Experiments with 3-5 objects arranged on a tabletop and a Turtlebot with a RealSense camera suggest that Lifelong LERF can persistently adapt to changes in objects with up to 91% accuracy.
A Touch, Vision, and Language Dataset for Multimodal Alignment
Feb 20, 2024Touch is an important sensing modality for humans, but it has not yet been incorporated into a multimodal generative language model. This is partially due to the difficulty of obtaining natural language labels for tactile data and the complexity of aligning tactile readings with both visual observations and language descriptions. As a step towards bridging that gap, this work introduces a new dataset of 44K in-the-wild vision-touch pairs, with English language labels annotated by humans (10%) and textual pseudo-labels from GPT-4V (90%). We use this dataset to train a vision-language-aligned tactile encoder for open-vocabulary classification and a touch-vision-language (TVL) model for text generation using the trained encoder. Results suggest that by incorporating touch, the TVL model improves (+29% classification accuracy) touch-vision-language alignment over existing models trained on any pair of those modalities. Although only a small fraction of the dataset is human-labeled, the TVL model demonstrates improved visual-tactile understanding over GPT-4V (+12%) and open-source vision-language models (+32%) on a new touch-vision understanding benchmark. Code and data: https://tactile-vlm.github.io.
Rethinking Patch Dependence for Masked Autoencoders
Jan 25, 2024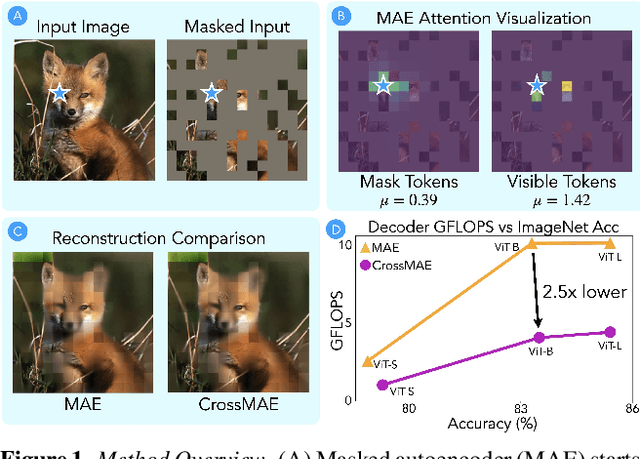
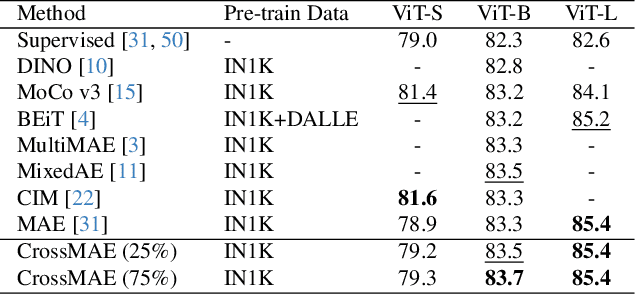
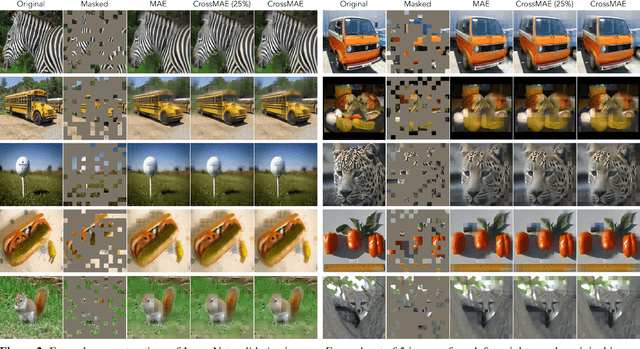
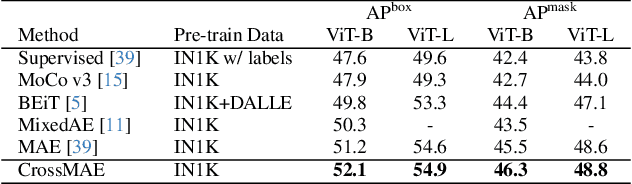
In this work, we re-examine inter-patch dependencies in the decoding mechanism of masked autoencoders (MAE). We decompose this decoding mechanism for masked patch reconstruction in MAE into self-attention and cross-attention. Our investigations suggest that self-attention between mask patches is not essential for learning good representations. To this end, we propose a novel pretraining framework: Cross-Attention Masked Autoencoders (CrossMAE). CrossMAE's decoder leverages only cross-attention between masked and visible tokens, with no degradation in downstream performance. This design also enables decoding only a small subset of mask tokens, boosting efficiency. Furthermore, each decoder block can now leverage different encoder features, resulting in improved representation learning. CrossMAE matches MAE in performance with 2.5 to 3.7$\times$ less decoding compute. It also surpasses MAE on ImageNet classification and COCO instance segmentation under the same compute. Code and models: https://crossmae.github.io
Robot Learning with Sensorimotor Pre-training
Jun 16, 2023We present a self-supervised sensorimotor pre-training approach for robotics. Our model, called RPT, is a Transformer that operates on sequences of sensorimotor tokens. Given a sequence of camera images, proprioceptive robot states, and past actions, we encode the interleaved sequence into tokens, mask out a random subset, and train a model to predict the masked-out content. We hypothesize that if the robot can predict the missing content it has acquired a good model of the physical world that can enable it to act. RPT is designed to operate on latent visual representations which makes prediction tractable, enables scaling to 10x larger models, and 10 Hz inference on a real robot. To evaluate our approach, we collect a dataset of 20,000 real-world trajectories over 9 months using a combination of motion planning and model-based grasping algorithms. We find that pre-training on this data consistently outperforms training from scratch, leads to 2x improvements in the block stacking task, and has favorable scaling properties.