 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeG-Zero: Self-Play for Open-Ended Generation from Zero Data
May 11, 2026Self-evolving LLMs excel in verifiable domains but struggle in open-ended tasks, where reliance on proxy LLM judges introduces capability bottlenecks and reward hacking. To overcome this, we introduce G-Zero, a verifier-free, co-evolutionary framework for autonomous self-improvement. Our core innovation is Hint-$δ$, an intrinsic reward that quantifies the predictive shift between a Generator model's unassisted response and its response conditioned on a self-generated hint. Using this signal, a Proposer model is trained via GRPO to continuously target the Generator's blind spots by synthesizing challenging queries and informative hints. The Generator is concurrently optimized via DPO to internalize these hint-guided improvements. Theoretically, we prove a best-iterate suboptimality guarantee for an idealized standard-DPO version of G-Zero, provided that the Proposer induces sufficient exploration coverage and the data filteration keeps pseudo-label score noise low. By deriving supervision entirely from internal distributional dynamics, G-Zero bypasses the capability ceilings of external judges, providing a scalable, robust pathway for continuous LLM self-evolution across unverifiable domains.
Reinforcing Multimodal Reasoning Against Visual Degradation
May 10, 2026Reinforcement Learning has significantly advanced the reasoning capabilities of Multimodal Large Language Models (MLLMs), yet the resulting policies remain brittle against real-world visual degradations such as blur, compression artifacts, and low-resolution scans. Prior robustness techniques from vision and deep RL rely on static data augmentation or value-based regularization, neither of which transfers cleanly to critic-free RL fine-tuning of autoregressive MLLMs. Reinforcing reasoning against such corruptions is non-trivial: naively injecting degraded views during rollout induces reward poisoning, where perceptual occlusions trigger hallucinated trajectories and destabilize optimization. We propose ROMA, an RL fine-tuning framework that modifies the optimization dynamics to reinforce reasoning against visual degradation while preserving clean-input performance. A dual-forward-pass strategy uses teacher forcing to evaluate corrupted views against clean-image trajectories, avoiding new rollouts on degraded inputs. For distributional consistency, we apply a token-level surrogate KL penalty against the worst-case augmentation; to prevent policy collapse under regularization, an auxiliary policy gradient loss anchored to clean-image advantages preserves a reliable reward signal; and to avoid systematically incorrect invariance, correctness-conditioned regularization restricts enforcement to successful trajectories. On Qwen3-VL 4B/8B across seven multimodal reasoning benchmarks, our method improves robustness by +2.4% on seen and +2.3% on unseen corruptions over GRPO while matching clean accuracy.
On the Complexity of Offline Reinforcement Learning with $Q^\star$-Approximation and Partial Coverage
Feb 12, 2026We study offline reinforcement learning under $Q^\star$-approximation and partial coverage, a setting that motivates practical algorithms such as Conservative $Q$-Learning (CQL; Kumar et al., 2020) but has received limited theoretical attention. Our work is inspired by the following open question: "Are $Q^\star$-realizability and Bellman completeness sufficient for sample-efficient offline RL under partial coverage?" We answer in the negative by establishing an information-theoretic lower bound. Going substantially beyond this, we introduce a general framework that characterizes the intrinsic complexity of a given $Q^\star$ function class, inspired by model-free decision-estimation coefficients (DEC) for online RL (Foster et al., 2023b; Liu et al., 2025b). This complexity recovers and improves the quantities underlying the guarantees of Chen and Jiang (2022) and Uehara et al. (2023), and extends to broader settings. Our decision-estimation decomposition can be combined with a wide range of $Q^\star$ estimation procedures, modularizing and generalizing existing approaches. Beyond the general framework, we make further contributions: By developing a novel second-order performance difference lemma, we obtain the first $ε^{-2}$ sample complexity under partial coverage for soft $Q$-learning, improving the $ε^{-4}$ bound of Uehara et al. (2023). We remove Chen and Jiang's (2022) need for additional online interaction when the value gap of $Q^\star$ is unknown. We also give the first characterization of offline learnability for general low-Bellman-rank MDPs without Bellman completeness (Jiang et al., 2017; Du et al., 2021; Jin et al., 2021), a canonical setting in online RL that remains unexplored in offline RL except for special cases. Finally, we provide the first analysis for CQL under $Q^\star$-realizability and Bellman completeness beyond the tabular case.
Training Data Efficiency in Multimodal Process Reward Models
Feb 05, 2026Multimodal Process Reward Models (MPRMs) are central to step-level supervision for visual reasoning in MLLMs. Training MPRMs typically requires large-scale Monte Carlo (MC)-annotated corpora, incurring substantial training cost. This paper studies the data efficiency for MPRM training. Our preliminary experiments reveal that MPRM training quickly saturates under random subsampling of the training data, indicating substantial redundancy within existing MC-annotated corpora. To explain this, we formalize a theoretical framework and reveal that informative gradient updates depend on two factors: label mixtures of positive/negative steps and label reliability (average MC scores of positive steps). Guided by these insights, we propose the Balanced-Information Score (BIS), which prioritizes both mixture and reliability based on existing MC signals at the rollout level, without incurring any additional cost. Across two backbones (InternVL2.5-8B and Qwen2.5-VL-7B) on VisualProcessBench, BIS-selected subsets consistently match and even surpass the full-data performance at small fractions. Notably, the BIS subset reaches full-data performance using only 10% of the training data, improving over random subsampling by a relative 4.1%.
HY3D-Bench: Generation of 3D Assets
Feb 03, 2026While recent advances in neural representations and generative models have revolutionized 3D content creation, the field remains constrained by significant data processing bottlenecks. To address this, we introduce HY3D-Bench, an open-source ecosystem designed to establish a unified, high-quality foundation for 3D generation. Our contributions are threefold: (1) We curate a library of 250k high-fidelity 3D objects distilled from large-scale repositories, employing a rigorous pipeline to deliver training-ready artifacts, including watertight meshes and multi-view renderings; (2) We introduce structured part-level decomposition, providing the granularity essential for fine-grained perception and controllable editing; and (3) We bridge real-world distribution gaps via a scalable AIGC synthesis pipeline, contributing 125k synthetic assets to enhance diversity in long-tail categories. Validated empirically through the training of Hunyuan3D-2.1-Small, HY3D-Bench democratizes access to robust data resources, aiming to catalyze innovation across 3D perception, robotics, and digital content creation.
Save the Good Prefix: Precise Error Penalization via Process-Supervised RL to Enhance LLM Reasoning
Jan 26, 2026Reinforcement learning (RL) has emerged as a powerful framework for improving the reasoning capabilities of large language models (LLMs). However, most existing RL approaches rely on sparse outcome rewards, which fail to credit correct intermediate steps in partially successful solutions. Process reward models (PRMs) offer fine-grained step-level supervision, but their scores are often noisy and difficult to evaluate. As a result, recent PRM benchmarks focus on a more objective capability: detecting the first incorrect step in a reasoning path. However, this evaluation target is misaligned with how PRMs are typically used in RL, where their step-wise scores are treated as raw rewards to maximize. To bridge this gap, we propose Verifiable Prefix Policy Optimization (VPPO), which uses PRMs only to localize the first error during RL. Given an incorrect rollout, VPPO partitions the trajectory into a verified correct prefix and an erroneous suffix based on the first error, rewarding the former while applying targeted penalties only after the detected mistake. This design yields stable, interpretable learning signals and improves credit assignment. Across multiple reasoning benchmarks, VPPO consistently outperforms sparse-reward RL and prior PRM-guided baselines on both Pass@1 and Pass@K.
RelayLLM: Efficient Reasoning via Collaborative Decoding
Jan 08, 2026Large Language Models (LLMs) for complex reasoning is often hindered by high computational costs and latency, while resource-efficient Small Language Models (SLMs) typically lack the necessary reasoning capacity. Existing collaborative approaches, such as cascading or routing, operate at a coarse granularity by offloading entire queries to LLMs, resulting in significant computational waste when the SLM is capable of handling the majority of reasoning steps. To address this, we propose RelayLLM, a novel framework for efficient reasoning via token-level collaborative decoding. Unlike routers, RelayLLM empowers the SLM to act as an active controller that dynamically invokes the LLM only for critical tokens via a special command, effectively "relaying" the generation process. We introduce a two-stage training framework, including warm-up and Group Relative Policy Optimization (GRPO) to teach the model to balance independence with strategic help-seeking. Empirical results across six benchmarks demonstrate that RelayLLM achieves an average accuracy of 49.52%, effectively bridging the performance gap between the two models. Notably, this is achieved by invoking the LLM for only 1.07% of the total generated tokens, offering a 98.2% cost reduction compared to performance-matched random routers.
Stable and Efficient Single-Rollout RL for Multimodal Reasoning
Dec 20, 2025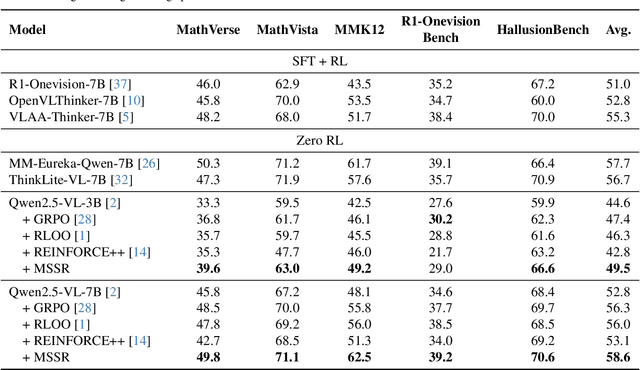
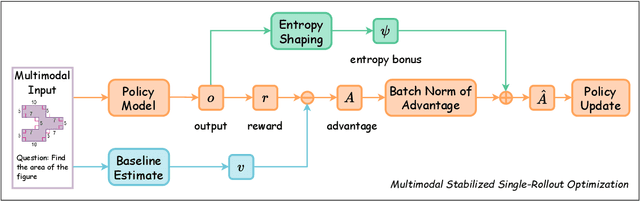

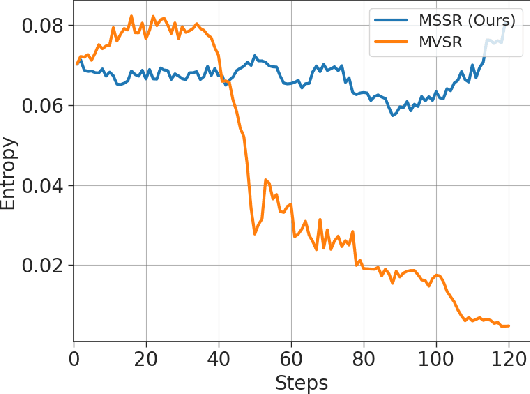
Reinforcement Learning with Verifiable Rewards (RLVR) has become a key paradigm to improve the reasoning capabilities of Multimodal Large Language Models (MLLMs). However, prevalent group-based algorithms such as GRPO require multi-rollout sampling for each prompt. While more efficient single-rollout variants have recently been explored in text-only settings, we find that they suffer from severe instability in multimodal contexts, often leading to training collapse. To address this training efficiency-stability trade-off, we introduce $\textbf{MSSR}$ (Multimodal Stabilized Single-Rollout), a group-free RLVR framework that achieves both stable optimization and effective multimodal reasoning performance. MSSR achieves this via an entropy-based advantage-shaping mechanism that adaptively regularizes advantage magnitudes, preventing collapse and maintaining training stability. While such mechanisms have been used in group-based RLVR, we show that in the multimodal single-rollout setting they are not merely beneficial but essential for stability. In in-distribution evaluations, MSSR demonstrates superior training compute efficiency, achieving similar validation accuracy to the group-based baseline with half the training steps. When trained for the same number of steps, MSSR's performance surpasses the group-based baseline and shows consistent generalization improvements across five diverse reasoning-intensive benchmarks. Together, these results demonstrate that MSSR enables stable, compute-efficient, and effective RLVR for complex multimodal reasoning tasks.
Evolving Language Models without Labels: Majority Drives Selection, Novelty Promotes Variation
Sep 18, 2025Large language models (LLMs) are increasingly trained with reinforcement learning from verifiable rewards (RLVR), yet real-world deployment demands models that can self-improve without labels or external judges. Existing label-free methods, confidence minimization, self-consistency, or majority-vote objectives, stabilize learning but steadily shrink exploration, causing an entropy collapse: generations become shorter, less diverse, and brittle. Unlike prior approaches such as Test-Time Reinforcement Learning (TTRL), which primarily adapt models to the immediate unlabeled dataset at hand, our goal is broader: to enable general improvements without sacrificing the model's inherent exploration capacity and generalization ability, i.e., evolving. We formalize this issue and propose EVolution-Oriented and Label-free Reinforcement Learning (EVOL-RL), a simple rule that couples stability with variation under a label-free setting. EVOL-RL keeps the majority-voted answer as a stable anchor (selection) while adding a novelty-aware reward that favors responses whose reasoning differs from what has already been produced (variation), measured in semantic space. Implemented with GRPO, EVOL-RL also uses asymmetric clipping to preserve strong signals and an entropy regularizer to sustain search. This majority-for-selection + novelty-for-variation design prevents collapse, maintains longer and more informative chains of thought, and improves both pass@1 and pass@n. EVOL-RL consistently outperforms the majority-only TTRL baseline; e.g., training on label-free AIME24 lifts Qwen3-4B-Base AIME25 pass@1 from TTRL's 4.6% to 16.4%, and pass@16 from 18.5% to 37.9%. EVOL-RL not only prevents diversity collapse but also unlocks stronger generalization across domains (e.g., GPQA). Furthermore, we demonstrate that EVOL-RL also boosts performance in the RLVR setting, highlighting its broad applicability.
Hunyuan3D Studio: End-to-End AI Pipeline for Game-Ready 3D Asset Generation
Sep 16, 2025



The creation of high-quality 3D assets, a cornerstone of modern game development, has long been characterized by labor-intensive and specialized workflows. This paper presents Hunyuan3D Studio, an end-to-end AI-powered content creation platform designed to revolutionize the game production pipeline by automating and streamlining the generation of game-ready 3D assets. At its core, Hunyuan3D Studio integrates a suite of advanced neural modules (such as Part-level 3D Generation, Polygon Generation, Semantic UV, etc.) into a cohesive and user-friendly system. This unified framework allows for the rapid transformation of a single concept image or textual description into a fully-realized, production-quality 3D model complete with optimized geometry and high-fidelity PBR textures. We demonstrate that assets generated by Hunyuan3D Studio are not only visually compelling but also adhere to the stringent technical requirements of contemporary game engines, significantly reducing iteration time and lowering the barrier to entry for 3D content creation. By providing a seamless bridge from creative intent to technical asset, Hunyuan3D Studio represents a significant leap forward for AI-assisted workflows in game development and interactive media.