 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne-2-3-45++: Fast Single Image to 3D Objects with Consistent Multi-View Generation and 3D Diffusion
Nov 14, 2023



Recent advancements in open-world 3D object generation have been remarkable, with image-to-3D methods offering superior fine-grained control over their text-to-3D counterparts. However, most existing models fall short in simultaneously providing rapid generation speeds and high fidelity to input images - two features essential for practical applications. In this paper, we present One-2-3-45++, an innovative method that transforms a single image into a detailed 3D textured mesh in approximately one minute. Our approach aims to fully harness the extensive knowledge embedded in 2D diffusion models and priors from valuable yet limited 3D data. This is achieved by initially finetuning a 2D diffusion model for consistent multi-view image generation, followed by elevating these images to 3D with the aid of multi-view conditioned 3D native diffusion models. Extensive experimental evaluations demonstrate that our method can produce high-quality, diverse 3D assets that closely mirror the original input image. Our project webpage: https://sudo-ai-3d.github.io/One2345plus_page.
RT-Trajectory: Robotic Task Generalization via Hindsight Trajectory Sketches
Nov 06, 2023



Generalization remains one of the most important desiderata for robust robot learning systems. While recently proposed approaches show promise in generalization to novel objects, semantic concepts, or visual distribution shifts, generalization to new tasks remains challenging. For example, a language-conditioned policy trained on pick-and-place tasks will not be able to generalize to a folding task, even if the arm trajectory of folding is similar to pick-and-place. Our key insight is that this kind of generalization becomes feasible if we represent the task through rough trajectory sketches. We propose a policy conditioning method using such rough trajectory sketches, which we call RT-Trajectory, that is practical, easy to specify, and allows the policy to effectively perform new tasks that would otherwise be challenging to perform. We find that trajectory sketches strike a balance between being detailed enough to express low-level motion-centric guidance while being coarse enough to allow the learned policy to interpret the trajectory sketch in the context of situational visual observations. In addition, we show how trajectory sketches can provide a useful interface to communicate with robotic policies: they can be specified through simple human inputs like drawings or videos, or through automated methods such as modern image-generating or waypoint-generating methods. We evaluate RT-Trajectory at scale on a variety of real-world robotic tasks, and find that RT-Trajectory is able to perform a wider range of tasks compared to language-conditioned and goal-conditioned policies, when provided the same training data.
Unleashing the Creative Mind: Language Model As Hierarchical Policy For Improved Exploration on Challenging Problem Solving
Nov 01, 2023



Large Language Models (LLMs) have achieved tremendous progress, yet they still often struggle with challenging reasoning problems. Current approaches address this challenge by sampling or searching detailed and low-level reasoning chains. However, these methods are still limited in their exploration capabilities, making it challenging for correct solutions to stand out in the huge solution space. In this work, we unleash LLMs' creative potential for exploring multiple diverse problem solving strategies by framing an LLM as a hierarchical policy via in-context learning. This policy comprises of a visionary leader that proposes multiple diverse high-level problem-solving tactics as hints, accompanied by a follower that executes detailed problem-solving processes following each of the high-level instruction. The follower uses each of the leader's directives as a guide and samples multiple reasoning chains to tackle the problem, generating a solution group for each leader proposal. Additionally, we propose an effective and efficient tournament-based approach to select among these explored solution groups to reach the final answer. Our approach produces meaningful and inspiring hints, enhances problem-solving strategy exploration, and improves the final answer accuracy on challenging problems in the MATH dataset. Code will be released at https://github.com/lz1oceani/LLM-As-Hierarchical-Policy.
TD-MPC2: Scalable, Robust World Models for Continuous Control
Oct 25, 2023



TD-MPC is a model-based reinforcement learning (RL) algorithm that performs local trajectory optimization in the latent space of a learned implicit (decoder-free) world model. In this work, we present TD-MPC2: a series of improvements upon the TD-MPC algorithm. We demonstrate that TD-MPC2 improves significantly over baselines across 104 online RL tasks spanning 4 diverse task domains, achieving consistently strong results with a single set of hyperparameters. We further show that agent capabilities increase with model and data size, and successfully train a single 317M parameter agent to perform 80 tasks across multiple task domains, embodiments, and action spaces. We conclude with an account of lessons, opportunities, and risks associated with large TD-MPC2 agents. Explore videos, models, data, code, and more at https://nicklashansen.github.io/td-mpc2
Zero123++: a Single Image to Consistent Multi-view Diffusion Base Model
Oct 23, 2023



We report Zero123++, an image-conditioned diffusion model for generating 3D-consistent multi-view images from a single input view. To take full advantage of pretrained 2D generative priors, we develop various conditioning and training schemes to minimize the effort of finetuning from off-the-shelf image diffusion models such as Stable Diffusion. Zero123++ excels in producing high-quality, consistent multi-view images from a single image, overcoming common issues like texture degradation and geometric misalignment. Furthermore, we showcase the feasibility of training a ControlNet on Zero123++ for enhanced control over the generation process. The code is available at https://github.com/SUDO-AI-3D/zero123plus.
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
FG-NeRF: Flow-GAN based Probabilistic Neural Radiance Field for Independence-Assumption-Free Uncertainty Estimation
Oct 04, 2023



Neural radiance fields with stochasticity have garnered significant interest by enabling the sampling of plausible radiance fields and quantifying uncertainty for downstream tasks. Existing works rely on the independence assumption of points in the radiance field or the pixels in input views to obtain tractable forms of the probability density function. However, this assumption inadvertently impacts performance when dealing with intricate geometry and texture. In this work, we propose an independence-assumption-free probabilistic neural radiance field based on Flow-GAN. By combining the generative capability of adversarial learning and the powerful expressivity of normalizing flow, our method explicitly models the density-radiance distribution of the whole scene. We represent our probabilistic NeRF as a mean-shifted probabilistic residual neural model. Our model is trained without an explicit likelihood function, thereby avoiding the independence assumption. Specifically, We downsample the training images with different strides and centers to form fixed-size patches which are used to train the generator with patch-based adversarial learning. Through extensive experiments, our method demonstrates state-of-the-art performance by predicting lower rendering errors and more reliable uncertainty on both synthetic and real-world datasets.
How to Model Brushless Electric Motors for the Design of Lightweight Robotic Systems
Sep 29, 2023



A key step in the development of lightweight, high performance robotic systems is the modeling and selection of permanent magnet brushless direct current (BLDC) electric motors. Typical modeling analyses are completed a priori, and provide insight for properly sizing a motor for an application, specifying the required operating voltage and current, as well as assessing the thermal response and other design attributes (e.g.transmission ratio). However, to perform these modeling analyses, proper information about the motor's characteristics are needed, which are often obtained from manufacturer datasheets. Through our own experience and communications with manufacturers, we have noticed a lack of clarity and standardization in modeling BLDC motors, compounded by vague or inconsistent terminology used in motor datasheets. The purpose of this tutorial is to concisely describe the governing equations for BLDC motor analyses used in the design process, as well as highlight potential errors that can arise from incorrect usage. We present a power-invariant conversion from phase and line-to-line reference frames to a familiar q-axis DC motor representation, which provides a ``brushed'' analogue of a three phase BLDC motor that is convenient for analysis and design. We highlight potential errors including incorrect calculations of winding resistive heat loss, improper estimation of motor torque via the motor's torque constant, and incorrect estimation of the required bus voltage or resulting angular velocity limitations. A unified and condensed set of governing equations is available for designers in the Appendix. The intent of this work is to provide a consolidated mathematical foundation for modeling BLDC motors that addresses existing confusion and fosters high performance designs of future robotic systems.
OpenIllumination: A Multi-Illumination Dataset for Inverse Rendering Evaluation on Real Objects
Sep 14, 2023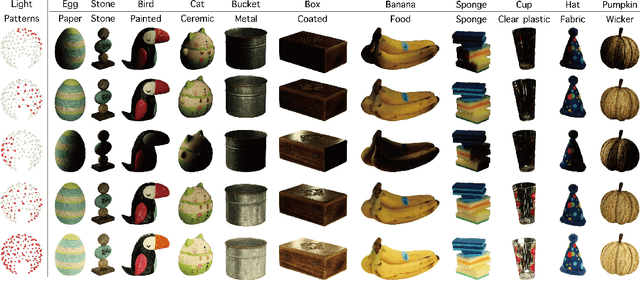

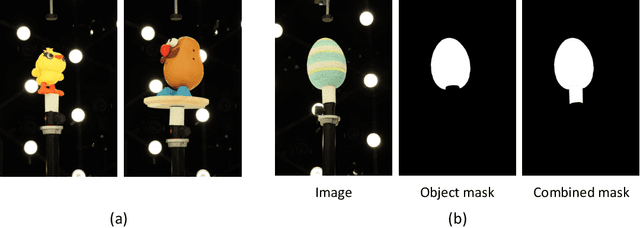

We introduce OpenIllumination, a real-world dataset containing over 108K images of 64 objects with diverse materials, captured under 72 camera views and a large number of different illuminations. For each image in the dataset, we provide accurate camera parameters, illumination ground truth, and foreground segmentation masks. Our dataset enables the quantitative evaluation of most inverse rendering and material decomposition methods for real objects. We examine several state-of-the-art inverse rendering methods on our dataset and compare their performances. The dataset and code can be found on the project page: https://oppo-us-research.github.io/OpenIllumination.
AnyTeleop: A General Vision-Based Dexterous Robot Arm-Hand Teleoperation System
Aug 02, 2023



Vision-based teleoperation offers the possibility to endow robots with human-level intelligence to physically interact with the environment, while only requiring low-cost camera sensors. However, current vision-based teleoperation systems are designed and engineered towards a particular robot model and deploy environment, which scales poorly as the pool of the robot models expands and the variety of the operating environment increases. In this paper, we propose AnyTeleop, a unified and general teleoperation system to support multiple different arms, hands, realities, and camera configurations within a single system. Although being designed to provide great flexibility to the choice of simulators and real hardware, our system can still achieve great performance. For real-world experiments, AnyTeleop can outperform a previous system that was designed for a specific robot hardware with a higher success rate, using the same robot. For teleoperation in simulation, AnyTeleop leads to better imitation learning performance, compared with a previous system that is particularly designed for that simulator. Project page: http://anyteleop.com/.