 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIsaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
Nov 06, 2025



We present Isaac Lab, the natural successor to Isaac Gym, which extends the paradigm of GPU-native robotics simulation into the era of large-scale multi-modal learning. Isaac Lab combines high-fidelity GPU parallel physics, photorealistic rendering, and a modular, composable architecture for designing environments and training robot policies. Beyond physics and rendering, the framework integrates actuator models, multi-frequency sensor simulation, data collection pipelines, and domain randomization tools, unifying best practices for reinforcement and imitation learning at scale within a single extensible platform. We highlight its application to a diverse set of challenges, including whole-body control, cross-embodiment mobility, contact-rich and dexterous manipulation, and the integration of human demonstrations for skill acquisition. Finally, we discuss upcoming integration with the differentiable, GPU-accelerated Newton physics engine, which promises new opportunities for scalable, data-efficient, and gradient-based approaches to robot learning. We believe Isaac Lab's combination of advanced simulation capabilities, rich sensing, and data-center scale execution will help unlock the next generation of breakthroughs in robotics research.
First Plan Then Evaluate: Use a Vectorized Motion Planner for Grasping
Sep 08, 2025Autonomous multi-finger grasping is a fundamental capability in robotic manipulation. Optimization-based approaches show strong performance, but tend to be sensitive to initialization and are potentially time-consuming. As an alternative, the generator-evaluator-planner framework has been proposed. A generator generates grasp candidates, an evaluator ranks the proposed grasps, and a motion planner plans a trajectory to the highest-ranked grasp. If the planner doesn't find a trajectory, a new trajectory optimization is started with the next-best grasp as the target and so on. However, executing lower-ranked grasps means a lower chance of grasp success, and multiple trajectory optimizations are time-consuming. Alternatively, relaxing the threshold for motion planning accuracy allows for easier computation of a successful trajectory but implies lower accuracy in estimating grasp success likelihood. It's a lose-lose proposition: either spend more time finding a successful trajectory or have a worse estimate of grasp success. We propose a framework that plans trajectories to a set of generated grasp targets in parallel, the evaluator estimates the grasp success likelihood of the resulting trajectories, and the robot executes the trajectory most likely to succeed. To plan trajectories to different targets efficiently, we propose the use of a vectorized motion planner. Our experiments show our approach improves over the traditional generator-evaluator-planner framework across different objects, generators, and motion planners, and successfully generalizes to novel environments in the real world, including different shelves and table heights. Project website https://sites.google.com/view/fpte
DextrAH-RGB: Visuomotor Policies to Grasp Anything with Dexterous Hands
Nov 27, 2024



One of the most important yet challenging skills for a robot is the task of dexterous grasping of a diverse range of objects. Much of the prior work is limited by the speed, dexterity, or reliance on depth maps. In this paper, we introduce DextrAH-RGB, a system that can perform dexterous arm-hand grasping end2end from stereo RGB input. We train a teacher fabric-guided policy (FGP) in simulation through reinforcement learning that acts on a geometric fabric action space to ensure reactivity and safety. We then distill this teacher FGP into a stereo RGB-based student FGP in simulation. To our knowledge, this is the first work that is able to demonstrate robust sim2real transfer of an end2end RGB-based policy for complex, dynamic, contact-rich tasks such as dexterous grasping. Our policies are able to generalize grasping to novel objects with unseen geometry, texture, or lighting conditions during training. Videos of our system grasping a diverse range of unseen objects are available at \url{https://dextrah-rgb.github.io/}
23 DoF Grasping Policies from a Raw Point Cloud
Nov 21, 2024
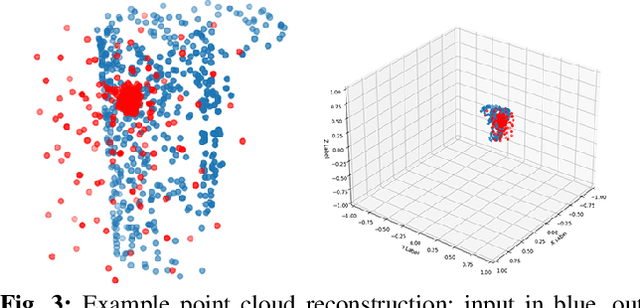
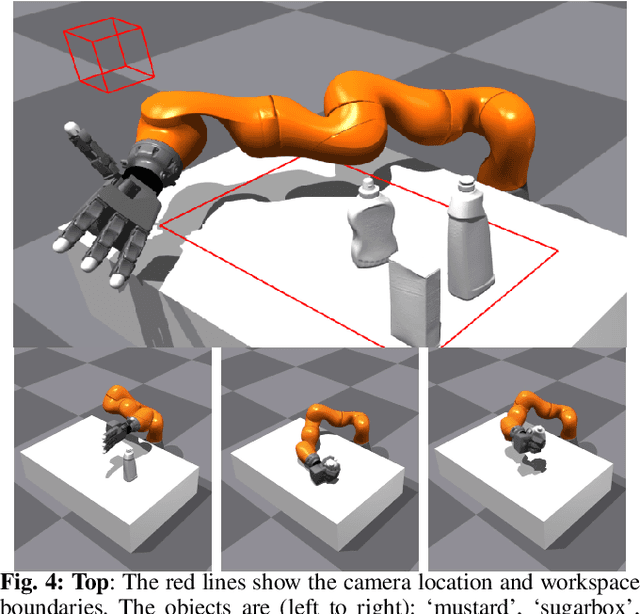
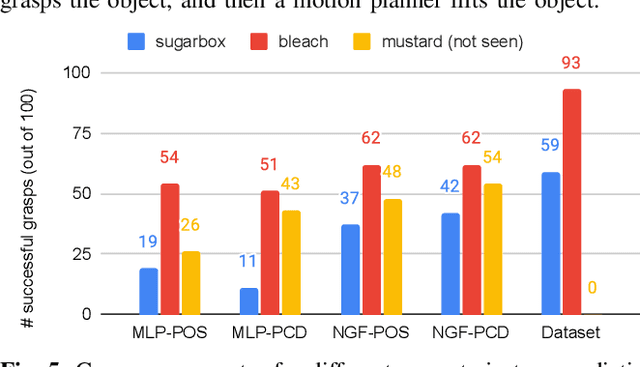
Coordinating the motion of robots with high degrees of freedom (DoF) to grasp objects gives rise to many challenges. In this paper, we propose a novel imitation learning approach to learn a policy that directly predicts 23 DoF grasp trajectories from a partial point cloud provided by a single, fixed camera. At the core of the approach is a second-order geometric-based model of behavioral dynamics. This Neural Geometric Fabric (NGF) policy predicts accelerations directly in joint space. We show that our policy is capable of generalizing to novel objects, and combine our policy with a geometric fabric motion planner in a loop to generate stable grasping trajectories. We evaluate our approach on a set of three different objects, compare different policy structures, and run ablation studies to understand the importance of different object encodings for policy learning.
Synthetica: Large Scale Synthetic Data for Robot Perception
Oct 28, 2024



Vision-based object detectors are a crucial basis for robotics applications as they provide valuable information about object localisation in the environment. These need to ensure high reliability in different lighting conditions, occlusions, and visual artifacts, all while running in real-time. Collecting and annotating real-world data for these networks is prohibitively time consuming and costly, especially for custom assets, such as industrial objects, making it untenable for generalization to in-the-wild scenarios. To this end, we present Synthetica, a method for large-scale synthetic data generation for training robust state estimators. This paper focuses on the task of object detection, an important problem which can serve as the front-end for most state estimation problems, such as pose estimation. Leveraging data from a photorealistic ray-tracing renderer, we scale up data generation, generating 2.7 million images, to train highly accurate real-time detection transformers. We present a collection of rendering randomization and training-time data augmentation techniques conducive to robust sim-to-real performance for vision tasks. We demonstrate state-of-the-art performance on the task of object detection while having detectors that run at 50-100Hz which is 9 times faster than the prior SOTA. We further demonstrate the usefulness of our training methodology for robotics applications by showcasing a pipeline for use in the real world with custom objects for which there do not exist prior datasets. Our work highlights the importance of scaling synthetic data generation for robust sim-to-real transfer while achieving the fastest real-time inference speeds. Videos and supplementary information can be found at this URL: https://sites.google.com/view/synthetica-vision.
AutoMate: Specialist and Generalist Assembly Policies over Diverse Geometries
Jul 10, 2024



Robotic assembly for high-mixture settings requires adaptivity to diverse parts and poses, which is an open challenge. Meanwhile, in other areas of robotics, large models and sim-to-real have led to tremendous progress. Inspired by such work, we present AutoMate, a learning framework and system that consists of 4 parts: 1) a dataset of 100 assemblies compatible with simulation and the real world, along with parallelized simulation environments for policy learning, 2) a novel simulation-based approach for learning specialist (i.e., part-specific) policies and generalist (i.e., unified) assembly policies, 3) demonstrations of specialist policies that individually solve 80 assemblies with 80% or higher success rates in simulation, as well as a generalist policy that jointly solves 20 assemblies with an 80%+ success rate, and 4) zero-shot sim-to-real transfer that achieves similar (or better) performance than simulation, including on perception-initialized assembly. The key methodological takeaway is that a union of diverse algorithms from manufacturing engineering, character animation, and time-series analysis provides a generic and robust solution for a diverse range of robotic assembly problems.To our knowledge, AutoMate provides the first simulation-based framework for learning specialist and generalist policies over a wide range of assemblies, as well as the first system demonstrating zero-shot sim-to-real transfer over such a range.
DextrAH-G: Pixels-to-Action Dexterous Arm-Hand Grasping with Geometric Fabrics
Jul 02, 2024



A pivotal challenge in robotics is achieving fast, safe, and robust dexterous grasping across a diverse range of objects, an important goal within industrial applications. However, existing methods often have very limited speed, dexterity, and generality, along with limited or no hardware safety guarantees. In this work, we introduce DextrAH-G, a depth-based dexterous grasping policy trained entirely in simulation that combines reinforcement learning, geometric fabrics, and teacher-student distillation. We address key challenges in joint arm-hand policy learning, such as high-dimensional observation and action spaces, the sim2real gap, collision avoidance, and hardware constraints. DextrAH-G enables a 23 motor arm-hand robot to safely and continuously grasp and transport a large variety of objects at high speed using multi-modal inputs including depth images, allowing generalization across object geometry. Videos at https://sites.google.com/view/dextrah-g.
Geometric Fabrics: a Safe Guiding Medium for Policy Learning
May 03, 2024


Robotics policies are always subjected to complex, second order dynamics that entangle their actions with resulting states. In reinforcement learning (RL) contexts, policies have the burden of deciphering these complicated interactions over massive amounts of experience and complex reward functions to learn how to accomplish tasks. Moreover, policies typically issue actions directly to controllers like Operational Space Control (OSC) or joint PD control, which induces straightline motion towards these action targets in task or joint space. However, straightline motion in these spaces for the most part do not capture the rich, nonlinear behavior our robots need to exhibit, shifting the burden of discovering these behaviors more completely to the agent. Unlike these simpler controllers, geometric fabrics capture a much richer and desirable set of behaviors via artificial, second order dynamics grounded in nonlinear geometry. These artificial dynamics shift the uncontrolled dynamics of a robot via an appropriate control law to form behavioral dynamics. Behavioral dynamics unlock a new action space and safe, guiding behavior over which RL policies are trained. Behavioral dynamics enable bang-bang-like RL policy actions that are still safe for real robots, simplify reward engineering, and help sequence real-world, high-performance policies. We describe the framework more generally and create a specific instantiation for the problem of dexterous, in-hand reorientation of a cube by a highly actuated robot hand.
cuRobo: Parallelized Collision-Free Minimum-Jerk Robot Motion Generation
Nov 03, 2023



This paper explores the problem of collision-free motion generation for manipulators by formulating it as a global motion optimization problem. We develop a parallel optimization technique to solve this problem and demonstrate its effectiveness on massively parallel GPUs. We show that combining simple optimization techniques with many parallel seeds leads to solving difficult motion generation problems within 50ms on average, 60x faster than state-of-the-art (SOTA) trajectory optimization methods. We achieve SOTA performance by combining L-BFGS step direction estimation with a novel parallel noisy line search scheme and a particle-based optimization solver. To further aid trajectory optimization, we develop a parallel geometric planner that plans within 20ms and also introduce a collision-free IK solver that can solve over 7000 queries/s. We package our contributions into a state of the art GPU accelerated motion generation library, cuRobo and release it to enrich the robotics community. Additional details are available at https://curobo.org
Fabrics: A Foundationally Stable Medium for Encoding Prior Experience
Sep 14, 2023Most dynamics functions are not well-aligned to task requirements. Controllers, therefore, often invert the dynamics and reshape it into something more useful. The learning community has found that these controllers, such as Operational Space Control (OSC), can offer important inductive biases for training. However, OSC only captures straight line end-effector motion. There's a lot more behavior we could and should be packing into these systems. Earlier work [15][16][19] developed a theory that generalized these ideas and constructed a broad and flexible class of second-order dynamical systems which was simultaneously expressive enough to capture substantial behavior (such as that listed above), and maintained the types of stability properties that make OSC and controllers like it a good foundation for policy design and learning. This paper, motivated by the empirical success of the types of fabrics used in [20], reformulates the theory of fabrics into a form that's more general and easier to apply to policy learning problems. We focus on the stability properties that make fabrics a good foundation for policy synthesis. Fabrics create a fundamentally stable medium within which a policy can operate; they influence the system's behavior without preventing it from achieving tasks within its constraints. When a fabrics is geometric (path consistent) we can interpret the fabric as forming a road network of paths that the system wants to follow at constant speed absent a forcing policy, giving geometric intuition to its role as a prior. The policy operating over the geometric fabric acts to modulate speed and steers the system from one road to the next as it accomplishes its task. We reformulate the theory of fabrics here rigorously and develop theoretical results characterizing system behavior and illuminating how to design these systems, while also emphasizing intuition throughout.