 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBundleSDF: Neural 6-DoF Tracking and 3D Reconstruction of Unknown Objects
Mar 24, 2023We present a near real-time method for 6-DoF tracking of an unknown object from a monocular RGBD video sequence, while simultaneously performing neural 3D reconstruction of the object. Our method works for arbitrary rigid objects, even when visual texture is largely absent. The object is assumed to be segmented in the first frame only. No additional information is required, and no assumption is made about the interaction agent. Key to our method is a Neural Object Field that is learned concurrently with a pose graph optimization process in order to robustly accumulate information into a consistent 3D representation capturing both geometry and appearance. A dynamic pool of posed memory frames is automatically maintained to facilitate communication between these threads. Our approach handles challenging sequences with large pose changes, partial and full occlusion, untextured surfaces, and specular highlights. We show results on HO3D, YCBInEOAT, and BEHAVE datasets, demonstrating that our method significantly outperforms existing approaches. Project page: https://bundlesdf.github.io
Constrained Generative Sampling of 6-DoF Grasps
Feb 21, 2023



Most state-of-the-art data-driven grasp sampling methods propose stable and collision-free grasps uniformly on the target object. For bin-picking, executing any of those grasps is sufficient. However, for completing specific tasks, such as squeezing out liquid from a bottle, we want the grasp to be on a specific part on the object body while avoiding other locations, such as the cap. In this work, we present a generative grasp sampling network, VCGS, capable of constrained 6-Degrees-of-Freedom (DoF) grasp sampling. In addition, we also curate a new dataset designed to train and evaluate methods for constrained grasping. The new dataset, called CONG, consists of over 14 million training samples of synthetically rendered point clouds and grasps at random target areas on 2889 objects. VCGS is benchmarked against GraspNet, a state-of-the-art unconstrained grasp sampler, in simulation and on a real robot. The results demonstrate that VCGS achieves a 10-15% higher grasp success rate than the baseline while being 2-3 times as sample efficient.
MegaPose: 6D Pose Estimation of Novel Objects via Render & Compare
Dec 13, 2022



We introduce MegaPose, a method to estimate the 6D pose of novel objects, that is, objects unseen during training. At inference time, the method only assumes knowledge of (i) a region of interest displaying the object in the image and (ii) a CAD model of the observed object. The contributions of this work are threefold. First, we present a 6D pose refiner based on a render&compare strategy which can be applied to novel objects. The shape and coordinate system of the novel object are provided as inputs to the network by rendering multiple synthetic views of the object's CAD model. Second, we introduce a novel approach for coarse pose estimation which leverages a network trained to classify whether the pose error between a synthetic rendering and an observed image of the same object can be corrected by the refiner. Third, we introduce a large-scale synthetic dataset of photorealistic images of thousands of objects with diverse visual and shape properties and show that this diversity is crucial to obtain good generalization performance on novel objects. We train our approach on this large synthetic dataset and apply it without retraining to hundreds of novel objects in real images from several pose estimation benchmarks. Our approach achieves state-of-the-art performance on the ModelNet and YCB-Video datasets. An extensive evaluation on the 7 core datasets of the BOP challenge demonstrates that our approach achieves performance competitive with existing approaches that require access to the target objects during training. Code, dataset and trained models are available on the project page: https://megapose6d.github.io/.
Sequence-Based Plan Feasibility Prediction for Efficient Task and Motion Planning
Nov 03, 2022Robots planning long-horizon behavior in complex environments must be able to quickly reason about the impact of the environment's geometry on what plans are feasible, i.e., whether there exist action parameter values that satisfy all constraints on a candidate plan. In tasks involving articulated and movable obstacles, typical Task and Motion Planning (TAMP) algorithms spend most of their runtime attempting to solve unsolvable constraint satisfaction problems imposed by infeasible plan skeletons. We developed a novel Transformer-based architecture, PIGINet, that predicts plan feasibility based on the initial state, goal, and candidate plans, fusing image and text embeddings with state features. The model sorts the plan skeletons produced by a TAMP planner according to the predicted satisfiability likelihoods. We evaluate the runtime of our learning-enabled TAMP algorithm on several distributions of kitchen rearrangement problems, comparing its performance to that of non-learning baselines and algorithm ablations. Our experiments show that PIGINet substantially improves planning efficiency, cutting down runtime by 80% on average on pick-and-place problems with articulated obstacles. It also achieves zero-shot generalization to problems with unseen object categories thanks to its visual encoding of objects.
DeXtreme: Transfer of Agile In-hand Manipulation from Simulation to Reality
Oct 25, 2022Recent work has demonstrated the ability of deep reinforcement learning (RL) algorithms to learn complex robotic behaviours in simulation, including in the domain of multi-fingered manipulation. However, such models can be challenging to transfer to the real world due to the gap between simulation and reality. In this paper, we present our techniques to train a) a policy that can perform robust dexterous manipulation on an anthropomorphic robot hand and b) a robust pose estimator suitable for providing reliable real-time information on the state of the object being manipulated. Our policies are trained to adapt to a wide range of conditions in simulation. Consequently, our vision-based policies significantly outperform the best vision policies in the literature on the same reorientation task and are competitive with policies that are given privileged state information via motion capture systems. Our work reaffirms the possibilities of sim-to-real transfer for dexterous manipulation in diverse kinds of hardware and simulator setups, and in our case, with the Allegro Hand and Isaac Gym GPU-based simulation. Furthermore, it opens up possibilities for researchers to achieve such results with commonly-available, affordable robot hands and cameras. Videos of the resulting policy and supplementary information, including experiments and demos, can be found at \url{https://dextreme.org/}
Learning Robust Real-World Dexterous Grasping Policies via Implicit Shape Augmentation
Oct 24, 2022



Dexterous robotic hands have the capability to interact with a wide variety of household objects to perform tasks like grasping. However, learning robust real world grasping policies for arbitrary objects has proven challenging due to the difficulty of generating high quality training data. In this work, we propose a learning system (ISAGrasp) for leveraging a small number of human demonstrations to bootstrap the generation of a much larger dataset containing successful grasps on a variety of novel objects. Our key insight is to use a correspondence-aware implicit generative model to deform object meshes and demonstrated human grasps in order to generate a diverse dataset of novel objects and successful grasps for supervised learning, while maintaining semantic realism. We use this dataset to train a robust grasping policy in simulation which can be deployed in the real world. We demonstrate grasping performance with a four-fingered Allegro hand in both simulation and the real world, and show this method can handle entirely new semantic classes and achieve a 79% success rate on grasping unseen objects in the real world.
DexTransfer: Real World Multi-fingered Dexterous Grasping with Minimal Human Demonstrations
Sep 28, 2022
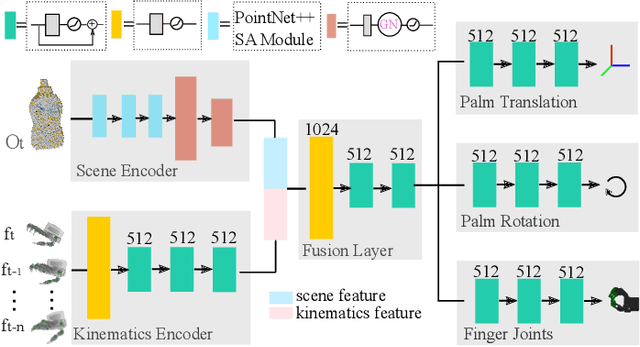
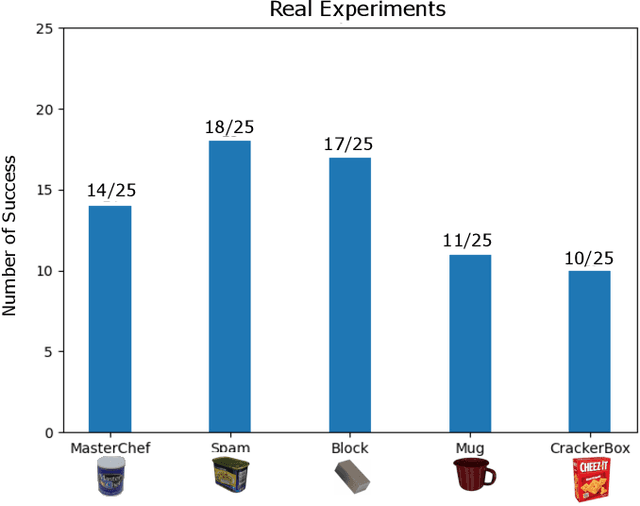
Teaching a multi-fingered dexterous robot to grasp objects in the real world has been a challenging problem due to its high dimensional state and action space. We propose a robot-learning system that can take a small number of human demonstrations and learn to grasp unseen object poses given partially occluded observations. Our system leverages a small motion capture dataset and generates a large dataset with diverse and successful trajectories for a multi-fingered robot gripper. By adding domain randomization, we show that our dataset provides robust grasping trajectories that can be transferred to a policy learner. We train a dexterous grasping policy that takes the point clouds of the object as input and predicts continuous actions to grasp objects from different initial robot states. We evaluate the effectiveness of our system on a 22-DoF floating Allegro Hand in simulation and a 23-DoF Allegro robot hand with a KUKA arm in real world. The policy learned from our dataset can generalize well on unseen object poses in both simulation and the real world
ProgPrompt: Generating Situated Robot Task Plans using Large Language Models
Sep 22, 2022
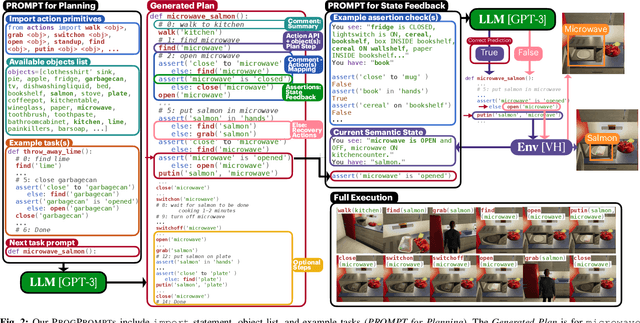
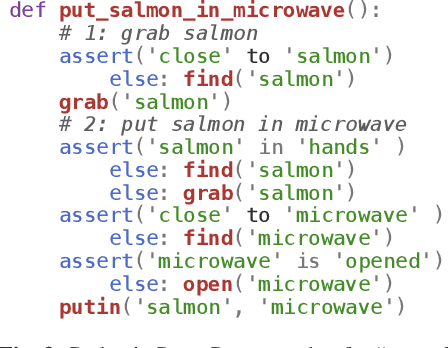

Task planning can require defining myriad domain knowledge about the world in which a robot needs to act. To ameliorate that effort, large language models (LLMs) can be used to score potential next actions during task planning, and even generate action sequences directly, given an instruction in natural language with no additional domain information. However, such methods either require enumerating all possible next steps for scoring, or generate free-form text that may contain actions not possible on a given robot in its current context. We present a programmatic LLM prompt structure that enables plan generation functional across situated environments, robot capabilities, and tasks. Our key insight is to prompt the LLM with program-like specifications of the available actions and objects in an environment, as well as with example programs that can be executed. We make concrete recommendations about prompt structure and generation constraints through ablation experiments, demonstrate state of the art success rates in VirtualHome household tasks, and deploy our method on a physical robot arm for tabletop tasks. Website at progprompt.github.io
Perceiver-Actor: A Multi-Task Transformer for Robotic Manipulation
Sep 12, 2022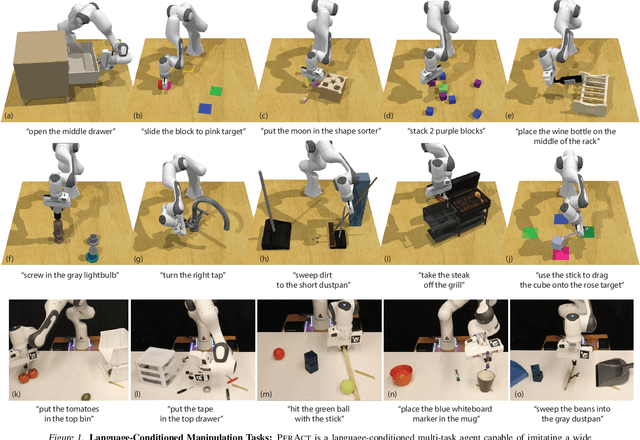
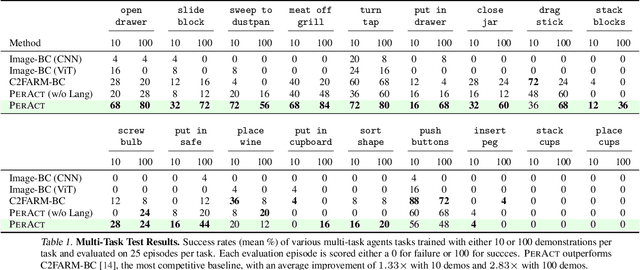
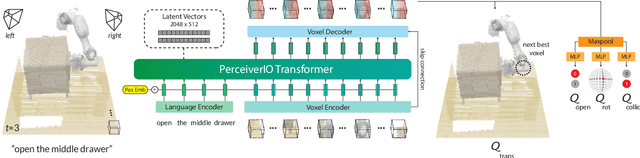
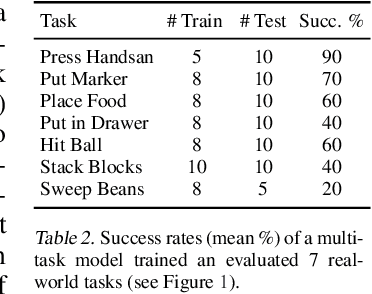
Transformers have revolutionized vision and natural language processing with their ability to scale with large datasets. But in robotic manipulation, data is both limited and expensive. Can we still benefit from Transformers with the right problem formulation? We investigate this question with PerAct, a language-conditioned behavior-cloning agent for multi-task 6-DoF manipulation. PerAct encodes language goals and RGB-D voxel observations with a Perceiver Transformer, and outputs discretized actions by "detecting the next best voxel action". Unlike frameworks that operate on 2D images, the voxelized observation and action space provides a strong structural prior for efficiently learning 6-DoF policies. With this formulation, we train a single multi-task Transformer for 18 RLBench tasks (with 249 variations) and 7 real-world tasks (with 18 variations) from just a few demonstrations per task. Our results show that PerAct significantly outperforms unstructured image-to-action agents and 3D ConvNet baselines for a wide range of tabletop tasks.
Break and Make: Interactive Structural Understanding Using LEGO Bricks
Jul 27, 2022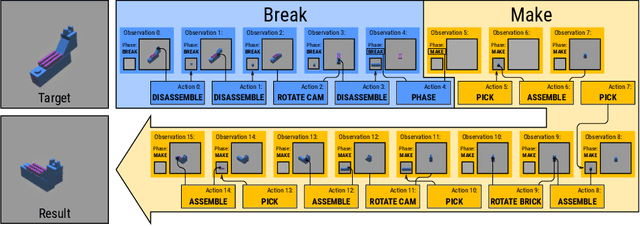
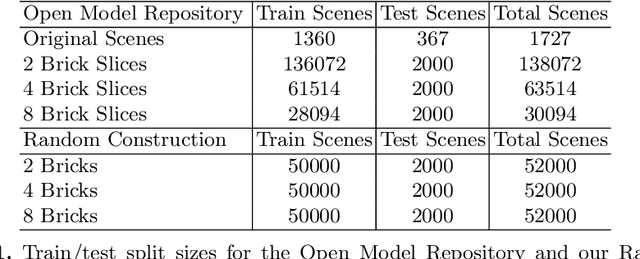
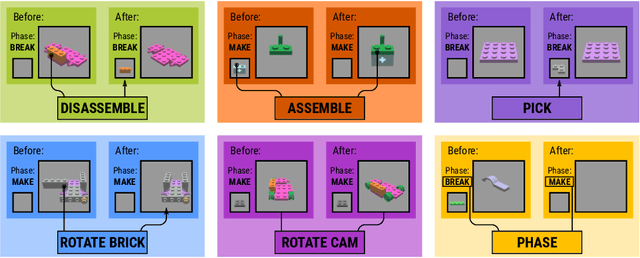
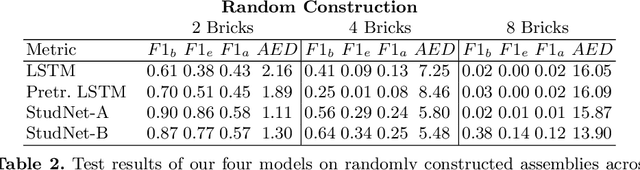
Visual understanding of geometric structures with complex spatial relationships is a fundamental component of human intelligence. As children, we learn how to reason about structure not only from observation, but also by interacting with the world around us -- by taking things apart and putting them back together again. The ability to reason about structure and compositionality allows us to not only build things, but also understand and reverse-engineer complex systems. In order to advance research in interactive reasoning for part-based geometric understanding, we propose a challenging new assembly problem using LEGO bricks that we call Break and Make. In this problem an agent is given a LEGO model and attempts to understand its structure by interactively inspecting and disassembling it. After this inspection period, the agent must then prove its understanding by rebuilding the model from scratch using low-level action primitives. In order to facilitate research on this problem we have built LTRON, a fully interactive 3D simulator that allows learning agents to assemble, disassemble and manipulate LEGO models. We pair this simulator with a new dataset of fan-made LEGO creations that have been uploaded to the internet in order to provide complex scenes containing over a thousand unique brick shapes. We take a first step towards solving this problem using sequence-to-sequence models that provide guidance for how to make progress on this challenging problem. Our simulator and data are available at github.com/aaronwalsman/ltron. Additional training code and PyTorch examples are available at github.com/aaronwalsman/ltron-torch-eccv22.