 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSkill0.5: Joint Skill Internalization and Utilization for Out-of-Distribution Generalization in Agentic Reinforcement Learning
May 27, 2026Equipping large language models with explicit skills has emerged as a promising paradigm for enabling autonomous agents to solve complex tasks. Agent skills can be inherently divided into general skills for broad cognitive transfer and task-specific skills for dynamic execution. However, existing skill-based reinforcement learning (RL) methods typically force a rigid choice between full externalization, which incurs prohibitive context overhead, and full internalization, which risks overfitting and knowledge conflicts. To address this dilemma, we propose Skill0.5, a novel agentic RL framework that explicitly differentiates skill treatments by combining general skill internalization with task-specific skill utilization. Driven by a dynamic, difficulty-aware router, Skill0.5 streams tasks into distinct mastery tiers to apply tailored optimization strategies: it internalizes general skills via privileged distillation to build a cognitive foundation for hard tasks, while using diagnostic probing on easy tasks to penalize shortcuts and enforce specific skill utilization. Experiments on ALFWorld and WebShop demonstrate that Skill0.5 outperforms both memory-based and skill-based RL baselines, yielding performance improvements across both in-distribution and out-of-distribution scenarios.
GUI-CIDER: Mid-training GUI Agents via Causal Internalization and Density-aware Exemplar Reselection
May 27, 2026Despite the rapid progress of multimodal large language models in building Graphical User Interface (GUI) agents, their real-world task completion is fundamentally bottlenecked by a lack of world knowledge about GUI operations. Existing solutions typically rely on expensive multi-agent scaffolding or conventional post-training paradigms, such as Supervised Fine-Tuning (SFT) and Reinforcement Learning (RL). However, post-training only allows agents to implicitly absorb world knowledge through action annotations or reward signals, leading to inefficient trajectory memorization rather than genuine comprehension. Therefore, an approach that enables explicit learning of this knowledge is imperative. To this end, we propose GUI-CIDER, a mid-training method that explicitly internalizes GUI world knowledge through Causal Internalization and Density-aware Exemplar Reselection. GUI-CIDER operates in three stages: (1) data synthesis, which distills static planning and dynamic causal knowledge from GUI trajectories into text; (2) exemplar reselection, which filters the corpus by rewarding causal structures and penalizing semantic redundancy; and (3) mid-training, where the refined data is used to embed the acquired knowledge. Extensive experiments on two GUI knowledge benchmarks and three task completion benchmarks demonstrate that GUI-CIDER consistently improves both the agent's understanding of GUI operations and its task success rates.The codes are available at https://github.com/Wuzheng02/GUI-CIDER.
SKILL0: In-Context Agentic Reinforcement Learning for Skill Internalization
Apr 02, 2026Agent skills, structured packages of procedural knowledge and executable resources that agents dynamically load at inference time, have become a reliable mechanism for augmenting LLM agents. Yet inference-time skill augmentation is fundamentally limited: retrieval noise introduces irrelevant guidance, injected skill content imposes substantial token overhead, and the model never truly acquires the knowledge it merely follows. We ask whether skills can instead be internalized into model parameters, enabling zero-shot autonomous behavior without any runtime skill retrieval. We introduce SKILL0, an in-context reinforcement learning framework designed for skill internalization. SKILL0 introduces a training-time curriculum that begins with full skill context and progressively withdraws it. Skills are grouped offline by category and rendered with interaction history into a compact visual context, teaching he model tool invocation and multi-turn task completion. A Dynamic Curriculum then evaluates each skill file's on-policy helpfulness, retaining only those from which the current policy still benefits within a linearly decaying budget, until the agent operates in a fully zero-shot setting. Extensive agentic experiments demonstrate that SKILL0 achieves substantial improvements over the standard RL baseline (+9.7\% for ALFWorld and +6.6\% for Search-QA), while maintaining a highly efficient context of fewer than 0.5k tokens per step. Our code is available at https://github.com/ZJU-REAL/SkillZero.
TopoCurate:Modeling Interaction Topology for Tool-Use Agent Training
Mar 02, 2026Training tool-use agents typically relies on outcome-based filtering: Supervised Fine-Tuning (SFT) on successful trajectories and Reinforcement Learning (RL) on pass-rate-selected tasks. However, this paradigm ignores interaction dynamics: successful trajectories may lack error recovery or exhibit redundancy, while pass rates fail to distinguish structurally informative tasks from trivial ones. We propose \textbf{TopoCurate}, an interaction-aware framework that projects multi-trial rollouts from the same task into a unified semantic quotient topology. By merging equivalent action-observation states, this projection transforms scattered linear trajectories into a structured manifold that explicitly captures how tool invocations and environmental responses drive the divergence between effective strategies and failure modes. Leveraging this representation, we introduce a dual-selection mechanism: for SFT, we prioritize trajectories demonstrating reflective recovery, semantic efficiency, and strategic diversity to mitigate covariate shift and mode collapse; for RL, we select tasks with high error branch ratios and strategic heterogeneity, maximizing gradient Signal-to-Noise Ratio to address vanishing signals in sparse-reward settings. Evaluations on BFCLv3 and Tau2 Bench show that TopoCurate achieves consistent gains of 4.2\% (SFT) and 6.9\% (RL) over state-of-the-art baselines. We will release the code and data soon for further investigations.
LongCat-Flash-Thinking-2601 Technical Report
Jan 23, 2026We introduce LongCat-Flash-Thinking-2601, a 560-billion-parameter open-source Mixture-of-Experts (MoE) reasoning model with superior agentic reasoning capability. LongCat-Flash-Thinking-2601 achieves state-of-the-art performance among open-source models on a wide range of agentic benchmarks, including agentic search, agentic tool use, and tool-integrated reasoning. Beyond benchmark performance, the model demonstrates strong generalization to complex tool interactions and robust behavior under noisy real-world environments. Its advanced capability stems from a unified training framework that combines domain-parallel expert training with subsequent fusion, together with an end-to-end co-design of data construction, environments, algorithms, and infrastructure spanning from pre-training to post-training. In particular, the model's strong generalization capability in complex tool-use are driven by our in-depth exploration of environment scaling and principled task construction. To optimize long-tailed, skewed generation and multi-turn agentic interactions, and to enable stable training across over 10,000 environments spanning more than 20 domains, we systematically extend our asynchronous reinforcement learning framework, DORA, for stable and efficient large-scale multi-environment training. Furthermore, recognizing that real-world tasks are inherently noisy, we conduct a systematic analysis and decomposition of real-world noise patterns, and design targeted training procedures to explicitly incorporate such imperfections into the training process, resulting in improved robustness for real-world applications. To further enhance performance on complex reasoning tasks, we introduce a Heavy Thinking mode that enables effective test-time scaling by jointly expanding reasoning depth and width through intensive parallel thinking.
VitaBench: Benchmarking LLM Agents with Versatile Interactive Tasks in Real-world Applications
Sep 30, 2025As LLM-based agents are increasingly deployed in real-life scenarios, existing benchmarks fail to capture their inherent complexity of handling extensive information, leveraging diverse resources, and managing dynamic user interactions. To address this gap, we introduce VitaBench, a challenging benchmark that evaluates agents on versatile interactive tasks grounded in real-world settings. Drawing from daily applications in food delivery, in-store consumption, and online travel services, VitaBench presents agents with the most complex life-serving simulation environment to date, comprising 66 tools. Through a framework that eliminates domain-specific policies, we enable flexible composition of these scenarios and tools, yielding 100 cross-scenario tasks (main results) and 300 single-scenario tasks. Each task is derived from multiple real user requests and requires agents to reason across temporal and spatial dimensions, utilize complex tool sets, proactively clarify ambiguous instructions, and track shifting user intent throughout multi-turn conversations. Moreover, we propose a rubric-based sliding window evaluator, enabling robust assessment of diverse solution pathways in complex environments and stochastic interactions. Our comprehensive evaluation reveals that even the most advanced models achieve only 30% success rate on cross-scenario tasks, and less than 50% success rate on others. Overall, we believe VitaBench will serve as a valuable resource for advancing the development of AI agents in practical real-world applications. The code, dataset, and leaderboard are available at https://vitabench.github.io/
MUSE: MCTS-Driven Red Teaming Framework for Enhanced Multi-Turn Dialogue Safety in Large Language Models
Sep 18, 2025As large language models~(LLMs) become widely adopted, ensuring their alignment with human values is crucial to prevent jailbreaks where adversaries manipulate models to produce harmful content. While most defenses target single-turn attacks, real-world usage often involves multi-turn dialogues, exposing models to attacks that exploit conversational context to bypass safety measures. We introduce MUSE, a comprehensive framework tackling multi-turn jailbreaks from both attack and defense angles. For attacks, we propose MUSE-A, a method that uses frame semantics and heuristic tree search to explore diverse semantic trajectories. For defense, we present MUSE-D, a fine-grained safety alignment approach that intervenes early in dialogues to reduce vulnerabilities. Extensive experiments on various models show that MUSE effectively identifies and mitigates multi-turn vulnerabilities. Code is available at \href{https://github.com/yansiyu02/MUSE}{https://github.com/yansiyu02/MUSE}.
MARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
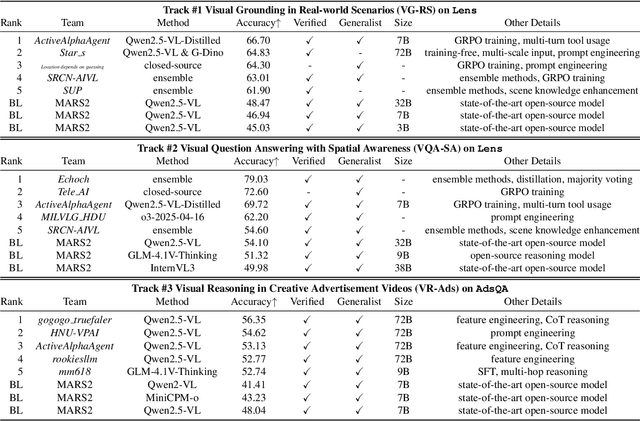

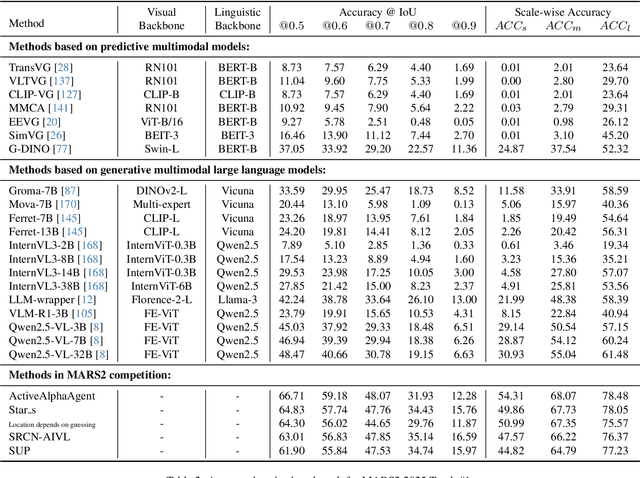
This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.
RMoA: Optimizing Mixture-of-Agents through Diversity Maximization and Residual Compensation
May 30, 2025Although multi-agent systems based on large language models show strong capabilities on multiple tasks, they are still limited by high computational overhead, information loss, and robustness. Inspired by ResNet's residual learning, we propose Residual Mixture-of-Agents (RMoA), integrating residual connections to optimize efficiency and reliability. To maximize information utilization from model responses while minimizing computational costs, we innovatively design an embedding-based diversity selection mechanism that greedily selects responses via vector similarity. Furthermore, to mitigate iterative information degradation, we introduce a Residual Extraction Agent to preserve cross-layer incremental information by capturing inter-layer response differences, coupled with a Residual Aggregation Agent for hierarchical information integration. Additionally, we propose an adaptive termination mechanism that dynamically halts processing based on residual convergence, further improving inference efficiency. RMoA achieves state-of-the-art performance on the benchmarks of across alignment, mathematical reasoning, code generation, and multitasking understanding, while significantly reducing computational overhead. Code is available at https://github.com/mindhunter01/RMoA.
Length Desensitization in Directed Preference Optimization
Sep 10, 2024



Direct Preference Optimization (DPO) is widely utilized in the Reinforcement Learning from Human Feedback (RLHF) phase to align Large Language Models (LLMs) with human preferences, thereby enhancing both their harmlessness and efficacy. However, it has been observed that DPO tends to over-optimize for verbosity, which can detrimentally affect both performance and user experience. In this paper, we conduct an in-depth theoretical analysis of DPO's optimization objective and reveal a strong correlation between its implicit reward and data length. This correlation misguides the optimization direction, resulting in length sensitivity during the DPO training and leading to verbosity. To address this issue, we propose a length-desensitization improvement method for DPO, termed LD-DPO. The proposed method aims to desensitize DPO to data length by decoupling explicit length preference, which is relatively insignificant, from the other implicit preferences, thereby enabling more effective learning of the intrinsic preferences. We utilized two settings (Base and Instruct) of Llama2-13B, Llama3-8B, and Qwen2-7B for experimental validation on various benchmarks including MT-Bench and AlpacaEval 2. The experimental results indicate that LD-DPO consistently outperforms DPO and other baseline methods, achieving more concise responses with a 10-40\% reduction in length compared to DPO. We conducted in-depth experimental analyses to demonstrate that LD-DPO can indeed achieve length desensitization and align the model more closely with human-real preferences.