 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-Fidelity Generative Audio Compression at 0.275kbps
Jan 31, 2026High-fidelity general audio compression at ultra-low bitrates is crucial for applications ranging from low-bandwidth communication to generative audio-language modeling. Traditional audio compression methods and contemporary neural codecs are fundamentally designed for waveform reconstruction. As a result, when operating at ultra-low bitrates, these methods degrade rapidly and often fail to preserve essential information, leading to severe acoustic artifacts and pronounced semantic distortion. To overcome these limitations, we introduce Generative Audio Compression (GAC), a novel paradigm shift from signal fidelity to task-oriented effectiveness. Implemented within the AI Flow framework, GAC is theoretically grounded in the Law of Information Capacity. These foundations posit that abundant computational power can be leveraged at the receiver to offset extreme communication bottlenecks--exemplifying the More Computation, Less Bandwidth philosophy. By integrating semantic understanding at the transmitter with scalable generative synthesis at the receiver, GAC offloads the information burden to powerful model priors. Our 1.8B-parameter model achieves high-fidelity reconstruction of 32kHz general audio at an unprecedented bitrate of 0.275kbps. Even at 0.175kbps, it still preserves a strong intelligible audio transmission capability, which represents an about 3000x compression ratio, significantly outperforming current state-of-the-art neural codecs in maintaining both perceptual quality and semantic consistency.
Rare Word Recognition and Translation Without Fine-Tuning via Task Vector in Speech Models
Dec 26, 2025Rare words remain a critical bottleneck for speech-to-text systems. While direct fine-tuning improves recognition of target words, it often incurs high cost, catastrophic forgetting, and limited scalability. To address these challenges, we propose a training-free paradigm based on task vectors for rare word recognition and translation. By defining task vectors as parameter differences and introducing word-level task vector arithmetic, our approach enables flexible composition of rare-word capabilities, greatly enhancing scalability and reusability. Extensive experiments across multiple domains show that the proposed method matches or surpasses fine-tuned models on target words, improves general performance by about 5 BLEU, and mitigates catastrophic forgetting.
Efficient Reasoning via Reward Model
Nov 12, 2025Reinforcement learning with verifiable rewards (RLVR) has been shown to enhance the reasoning capabilities of large language models (LLMs), enabling the development of large reasoning models (LRMs). However, LRMs such as DeepSeek-R1 and OpenAI o1 often generate verbose responses containing redundant or irrelevant reasoning step-a phenomenon known as overthinking-which substantially increases computational costs. Prior efforts to mitigate this issue commonly incorporate length penalties into the reward function, but we find they frequently suffer from two critical issues: length collapse and training collapse, resulting in sub-optimal performance. To address them, we propose a pipeline for training a Conciseness Reward Model (CRM) that scores the conciseness of reasoning path. Additionally, we introduce a novel reward formulation named Conciseness Reward Function (CRF) with explicit dependency between the outcome reward and conciseness score, thereby fostering both more effective and more efficient reasoning. From a theoretical standpoint, we demonstrate the superiority of the new reward from the perspective of variance reduction and improved convergence properties. Besides, on the practical side, extensive experiments on five mathematical benchmark datasets demonstrate the method's effectiveness and token efficiency, which achieves an 8.1% accuracy improvement and a 19.9% reduction in response token length on Qwen2.5-7B. Furthermore, the method generalizes well to other LLMs including Llama and Mistral. The implementation code and datasets are publicly available for reproduction: https://anonymous.4open.science/r/CRM.
Complementary Learning System Empowers Online Continual Learning of Vehicle Motion Forecasting in Smart Cities
Aug 27, 2025



Artificial intelligence underpins most smart city services, yet deep neural network (DNN) that forecasts vehicle motion still struggle with catastrophic forgetting, the loss of earlier knowledge when models are updated. Conventional fixes enlarge the training set or replay past data, but these strategies incur high data collection costs, sample inefficiently and fail to balance long- and short-term experience, leaving them short of human-like continual learning. Here we introduce Dual-LS, a task-free, online continual learning paradigm for DNN-based motion forecasting that is inspired by the complementary learning system of the human brain. Dual-LS pairs two synergistic memory rehearsal replay mechanisms to accelerate experience retrieval while dynamically coordinating long-term and short-term knowledge representations. Tests on naturalistic data spanning three countries, over 772,000 vehicles and cumulative testing mileage of 11,187 km show that Dual-LS mitigates catastrophic forgetting by up to 74.31\% and reduces computational resource demand by up to 94.02\%, markedly boosting predictive stability in vehicle motion forecasting without inflating data requirements. Meanwhile, it endows DNN-based vehicle motion forecasting with computation efficient and human-like continual learning adaptability fit for smart cities.
ASVspoof 5: Design, Collection and Validation of Resources for Spoofing, Deepfake, and Adversarial Attack Detection Using Crowdsourced Speech
Feb 13, 2025



ASVspoof 5 is the fifth edition in a series of challenges which promote the study of speech spoofing and deepfake attacks as well as the design of detection solutions. We introduce the ASVspoof 5 database which is generated in crowdsourced fashion from data collected in diverse acoustic conditions (cf. studio-quality data for earlier ASVspoof databases) and from ~2,000 speakers (cf. ~100 earlier). The database contains attacks generated with 32 different algorithms, also crowdsourced, and optimised to varying degrees using new surrogate detection models. Among them are attacks generated with a mix of legacy and contemporary text-to-speech synthesis and voice conversion models, in addition to adversarial attacks which are incorporated for the first time. ASVspoof 5 protocols comprise seven speaker-disjoint partitions. They include two distinct partitions for the training of different sets of attack models, two more for the development and evaluation of surrogate detection models, and then three additional partitions which comprise the ASVspoof 5 training, development and evaluation sets. An auxiliary set of data collected from an additional 30k speakers can also be used to train speaker encoders for the implementation of attack algorithms. Also described herein is an experimental validation of the new ASVspoof 5 database using a set of automatic speaker verification and spoof/deepfake baseline detectors. With the exception of protocols and tools for the generation of spoofed/deepfake speech, the resources described in this paper, already used by participants of the ASVspoof 5 challenge in 2024, are now all freely available to the community.
Characteristic-Specific Partial Fine-Tuning for Efficient Emotion and Speaker Adaptation in Codec Language Text-to-Speech Models
Jan 24, 2025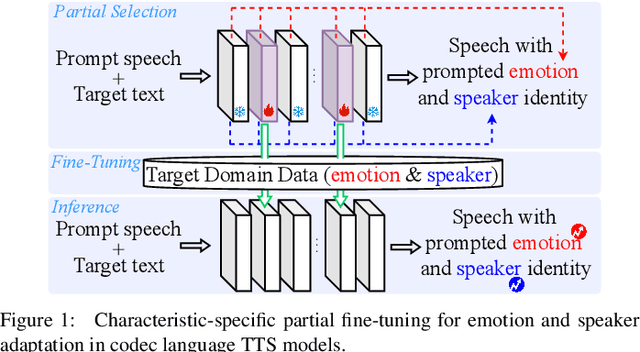
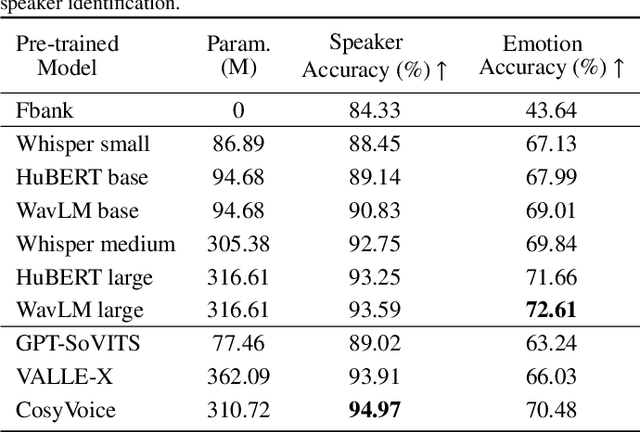
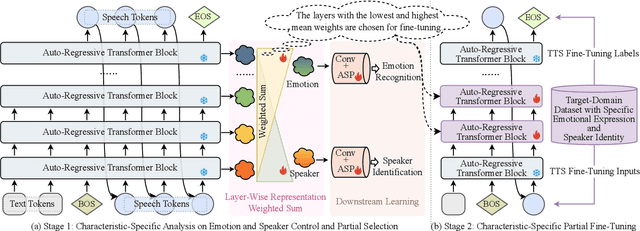
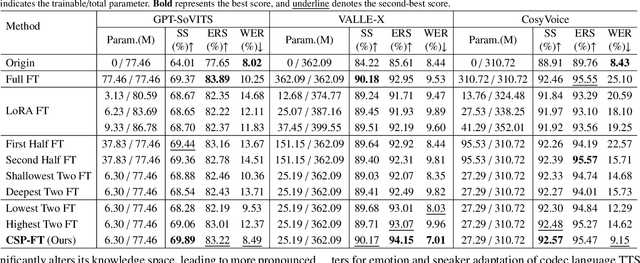
Recently, emotional speech generation and speaker cloning have garnered significant interest in text-to-speech (TTS). With the open-sourcing of codec language TTS models trained on massive datasets with large-scale parameters, adapting these general pre-trained TTS models to generate speech with specific emotional expressions and target speaker characteristics has become a topic of great attention. Common approaches, such as full and adapter-based fine-tuning, often overlook the specific contributions of model parameters to emotion and speaker control. Treating all parameters uniformly during fine-tuning, especially when the target data has limited content diversity compared to the pre-training corpus, results in slow training speed and an increased risk of catastrophic forgetting. To address these challenges, we propose a characteristic-specific partial fine-tuning strategy, short as CSP-FT. First, we use a weighted-sum approach to analyze the contributions of different Transformer layers in a pre-trained codec language TTS model for emotion and speaker control in the generated speech. We then selectively fine-tune the layers with the highest and lowest characteristic-specific contributions to generate speech with target emotional expression and speaker identity. Experimental results demonstrate that our method achieves performance comparable to, or even surpassing, full fine-tuning in generating speech with specific emotional expressions and speaker identities. Additionally, CSP-FT delivers approximately 2x faster training speeds, fine-tunes only around 8% of parameters, and significantly reduces catastrophic forgetting. Furthermore, we show that codec language TTS models perform competitively with self-supervised models in speaker identification and emotion classification tasks, offering valuable insights for developing universal speech processing models.
MOS-Attack: A Scalable Multi-objective Adversarial Attack Framework
Jan 13, 2025Crafting adversarial examples is crucial for evaluating and enhancing the robustness of Deep Neural Networks (DNNs), presenting a challenge equivalent to maximizing a non-differentiable 0-1 loss function. However, existing single objective methods, namely adversarial attacks focus on a surrogate loss function, do not fully harness the benefits of engaging multiple loss functions, as a result of insufficient understanding of their synergistic and conflicting nature. To overcome these limitations, we propose the Multi-Objective Set-based Attack (MOS Attack), a novel adversarial attack framework leveraging multiple loss functions and automatically uncovering their interrelations. The MOS Attack adopts a set-based multi-objective optimization strategy, enabling the incorporation of numerous loss functions without additional parameters. It also automatically mines synergistic patterns among various losses, facilitating the generation of potent adversarial attacks with fewer objectives. Extensive experiments have shown that our MOS Attack outperforms single-objective attacks. Furthermore, by harnessing the identified synergistic patterns, MOS Attack continues to show superior results with a reduced number of loss functions.
EmoPro: A Prompt Selection Strategy for Emotional Expression in LM-based Speech Synthesis
Sep 27, 2024



Recent advancements in speech synthesis models, trained on extensive datasets, have demonstrated remarkable zero-shot capabilities. These models can control content, timbre, and emotion in generated speech based on prompt inputs. Despite these advancements, the choice of prompts significantly impacts the output quality, yet most existing selection schemes do not adequately address the control of emotional intensity. To address this question, this paper proposes a two-stage prompt selection strategy EmoPro, which is specifically designed for emotionally controllable speech synthesis. This strategy focuses on selecting highly expressive and high-quality prompts by evaluating them from four perspectives: emotional expression strength, speech quality, text-emotion consistency, and model generation performance. Experimental results show that prompts selected using the proposed method result in more emotionally expressive and engaging synthesized speech compared to those obtained through baseline. Audio samples and codes will be available at https://whyrrrrun.github.io/EmoPro/.
VQ-CTAP: Cross-Modal Fine-Grained Sequence Representation Learning for Speech Processing
Aug 11, 2024Deep learning has brought significant improvements to the field of cross-modal representation learning. For tasks such as text-to-speech (TTS), voice conversion (VC), and automatic speech recognition (ASR), a cross-modal fine-grained (frame-level) sequence representation is desired, emphasizing the semantic content of the text modality while de-emphasizing the paralinguistic information of the speech modality. We propose a method called "Vector Quantized Contrastive Token-Acoustic Pre-training (VQ-CTAP)", which uses the cross-modal aligned sequence transcoder to bring text and speech into a joint multimodal space, learning how to connect text and speech at the frame level. The proposed VQ-CTAP is a paradigm for cross-modal sequence representation learning, offering a promising solution for fine-grained generation and recognition tasks in speech processing. The VQ-CTAP can be directly applied to VC and ASR tasks without fine-tuning or additional structures. We propose a sequence-aware semantic connector, which connects multiple frozen pre-trained modules for the TTS task, exhibiting a plug-and-play capability. We design a stepping optimization strategy to ensure effective model convergence by gradually injecting and adjusting the influence of various loss components. Furthermore, we propose a semantic-transfer-wise paralinguistic consistency loss to enhance representational capabilities, allowing the model to better generalize to unseen data and capture the nuances of paralinguistic information. In addition, VQ-CTAP achieves high-compression speech coding at a rate of 25Hz from 24kHz input waveforms, which is a 960-fold reduction in the sampling rate. The audio demo is available at https://qiangchunyu.github.io/VQCTAP/
Deep Feature Surgery: Towards Accurate and Efficient Multi-Exit Networks
Jul 19, 2024



Multi-exit network is a promising architecture for efficient model inference by sharing backbone networks and weights among multiple exits. However, the gradient conflict of the shared weights results in sub-optimal accuracy. This paper introduces Deep Feature Surgery (\methodname), which consists of feature partitioning and feature referencing approaches to resolve gradient conflict issues during the training of multi-exit networks. The feature partitioning separates shared features along the depth axis among all exits to alleviate gradient conflict while simultaneously promoting joint optimization for each exit. Subsequently, feature referencing enhances multi-scale features for distinct exits across varying depths to improve the model accuracy. Furthermore, \methodname~reduces the training operations with the reduced complexity of backpropagation. Experimental results on Cifar100 and ImageNet datasets exhibit that \methodname~provides up to a \textbf{50.00\%} reduction in training time and attains up to a \textbf{6.94\%} enhancement in accuracy when contrasted with baseline methods across diverse models and tasks. Budgeted batch classification evaluation on MSDNet demonstrates that DFS uses about $\mathbf{2}\boldsymbol{\times}$ fewer average FLOPs per image to achieve the same classification accuracy as baseline methods on Cifar100.