 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-scale Fused Graph Neural Network with Inter-view Contrastive Learning for Spatial Transcriptomics Data Clustering
Dec 18, 2025



Spatial transcriptomics enables genome-wide expression analysis within native tissue context, yet identifying spatial domains remains challenging due to complex gene-spatial interactions. Existing methods typically process spatial and feature views separately, fusing only at output level - an "encode-separately, fuse-late" paradigm that limits multi-scale semantic capture and cross-view interaction. Accordingly, stMFG is proposed, a multi-scale interactive fusion graph network that introduces layer-wise cross-view attention to dynamically integrate spatial and gene features after each convolution. The model combines cross-view contrastive learning with spatial constraints to enhance discriminability while maintaining spatial continuity. On DLPFC and breast cancer datasets, stMFG outperforms state-of-the-art methods, achieving up to 14% ARI improvement on certain slices.
CHIP: Adaptive Compliance for Humanoid Control through Hindsight Perturbation
Dec 16, 2025



Recent progress in humanoid robots has unlocked agile locomotion skills, including backflipping, running, and crawling. Yet it remains challenging for a humanoid robot to perform forceful manipulation tasks such as moving objects, wiping, and pushing a cart. We propose adaptive Compliance Humanoid control through hIsight Perturbation (CHIP), a plug-and-play module that enables controllable end-effector stiffness while preserving agile tracking of dynamic reference motions. CHIP is easy to implement and requires neither data augmentation nor additional reward tuning. We show that a generalist motion-tracking controller trained with CHIP can perform a diverse set of forceful manipulation tasks that require different end-effector compliance, such as multi-robot collaboration, wiping, box delivery, and door opening.
Condensation-Concatenation Framework for Dynamic Graph Continual Learning
Dec 12, 2025


Dynamic graphs are prevalent in real-world scenarios, where continuous structural changes induce catastrophic forgetting in graph neural networks (GNNs). While continual learning has been extended to dynamic graphs, existing methods overlook the effects of topological changes on existing nodes. To address it, we propose a novel framework for continual learning on dynamic graphs, named Condensation-Concatenation-based Continual Learning (CCC). Specifically, CCC first condenses historical graph snapshots into compact semantic representations while aiming to preserve the original label distribution and topological properties. Then it concatenates these historical embeddings with current graph representations selectively. Moreover, we refine the forgetting measure (FM) to better adapt to dynamic graph scenarios by quantifying the predictive performance degradation of existing nodes caused by structural updates. CCC demonstrates superior performance over state-of-the-art baselines across four real-world datasets in extensive experiments.
CARI4D: Category Agnostic 4D Reconstruction of Human-Object Interaction
Dec 12, 2025Accurate capture of human-object interaction from ubiquitous sensors like RGB cameras is important for applications in human understanding, gaming, and robot learning. However, inferring 4D interactions from a single RGB view is highly challenging due to the unknown object and human information, depth ambiguity, occlusion, and complex motion, which hinder consistent 3D and temporal reconstruction. Previous methods simplify the setup by assuming ground truth object template or constraining to a limited set of object categories. We present CARI4D, the first category-agnostic method that reconstructs spatially and temporarily consistent 4D human-object interaction at metric scale from monocular RGB videos. To this end, we propose a pose hypothesis selection algorithm that robustly integrates the individual predictions from foundation models, jointly refine them through a learned render-and-compare paradigm to ensure spatial, temporal and pixel alignment, and finally reasoning about intricate contacts for further refinement satisfying physical constraints. Experiments show that our method outperforms prior art by 38% on in-distribution dataset and 36% on unseen dataset in terms of reconstruction error. Our model generalizes beyond the training categories and thus can be applied zero-shot to in-the-wild internet videos. Our code and pretrained models will be publicly released.
VIRAL: Visual Sim-to-Real at Scale for Humanoid Loco-Manipulation
Nov 19, 2025



A key barrier to the real-world deployment of humanoid robots is the lack of autonomous loco-manipulation skills. We introduce VIRAL, a visual sim-to-real framework that learns humanoid loco-manipulation entirely in simulation and deploys it zero-shot to real hardware. VIRAL follows a teacher-student design: a privileged RL teacher, operating on full state, learns long-horizon loco-manipulation using a delta action space and reference state initialization. A vision-based student policy is then distilled from the teacher via large-scale simulation with tiled rendering, trained with a mixture of online DAgger and behavior cloning. We find that compute scale is critical: scaling simulation to tens of GPUs (up to 64) makes both teacher and student training reliable, while low-compute regimes often fail. To bridge the sim-to-real gap, VIRAL combines large-scale visual domain randomization over lighting, materials, camera parameters, image quality, and sensor delays--with real-to-sim alignment of the dexterous hands and cameras. Deployed on a Unitree G1 humanoid, the resulting RGB-based policy performs continuous loco-manipulation for up to 54 cycles, generalizing to diverse spatial and appearance variations without any real-world fine-tuning, and approaching expert-level teleoperation performance. Extensive ablations dissect the key design choices required to make RGB-based humanoid loco-manipulation work in practice.
SONIC: Supersizing Motion Tracking for Natural Humanoid Whole-Body Control
Nov 11, 2025Despite the rise of billion-parameter foundation models trained across thousands of GPUs, similar scaling gains have not been shown for humanoid control. Current neural controllers for humanoids remain modest in size, target a limited behavior set, and are trained on a handful of GPUs over several days. We show that scaling up model capacity, data, and compute yields a generalist humanoid controller capable of creating natural and robust whole-body movements. Specifically, we posit motion tracking as a natural and scalable task for humanoid control, leverageing dense supervision from diverse motion-capture data to acquire human motion priors without manual reward engineering. We build a foundation model for motion tracking by scaling along three axes: network size (from 1.2M to 42M parameters), dataset volume (over 100M frames, 700 hours of high-quality motion data), and compute (9k GPU hours). Beyond demonstrating the benefits of scale, we show the practical utility of our model through two mechanisms: (1) a real-time universal kinematic planner that bridges motion tracking to downstream task execution, enabling natural and interactive control, and (2) a unified token space that supports various motion input interfaces, such as VR teleoperation devices, human videos, and vision-language-action (VLA) models, all using the same policy. Scaling motion tracking exhibits favorable properties: performance improves steadily with increased compute and data diversity, and learned representations generalize to unseen motions, establishing motion tracking at scale as a practical foundation for humanoid control.
Awakening Facial Emotional Expressions in Human-Robot
Oct 27, 2025The facial expression generation capability of humanoid social robots is critical for achieving natural and human-like interactions, playing a vital role in enhancing the fluidity of human-robot interactions and the accuracy of emotional expression. Currently, facial expression generation in humanoid social robots still relies on pre-programmed behavioral patterns, which are manually coded at high human and time costs. To enable humanoid robots to autonomously acquire generalized expressive capabilities, they need to develop the ability to learn human-like expressions through self-training. To address this challenge, we have designed a highly biomimetic robotic face with physical-electronic animated facial units and developed an end-to-end learning framework based on KAN (Kolmogorov-Arnold Network) and attention mechanisms. Unlike previous humanoid social robots, we have also meticulously designed an automated data collection system based on expert strategies of facial motion primitives to construct the dataset. Notably, to the best of our knowledge, this is the first open-source facial dataset for humanoid social robots. Comprehensive evaluations indicate that our approach achieves accurate and diverse facial mimicry across different test subjects.
MARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
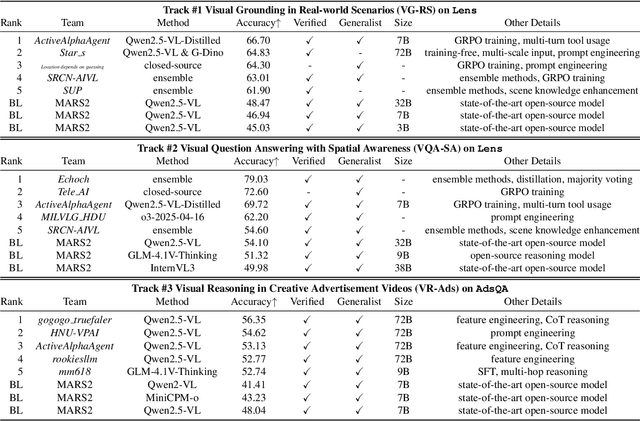

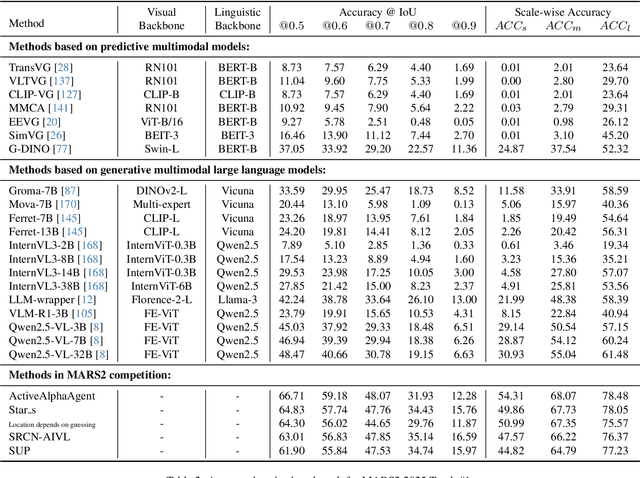
This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.
HLSMAC: A New StarCraft Multi-Agent Challenge for High-Level Strategic Decision-Making
Sep 16, 2025



Benchmarks are crucial for assessing multi-agent reinforcement learning (MARL) algorithms. While StarCraft II-related environments have driven significant advances in MARL, existing benchmarks like SMAC focus primarily on micromanagement, limiting comprehensive evaluation of high-level strategic intelligence. To address this, we introduce HLSMAC, a new cooperative MARL benchmark with 12 carefully designed StarCraft II scenarios based on classical stratagems from the Thirty-Six Stratagems. Each scenario corresponds to a specific stratagem and is designed to challenge agents with diverse strategic elements, including tactical maneuvering, timing coordination, and deception, thereby opening up avenues for evaluating high-level strategic decision-making capabilities. We also propose novel metrics across multiple dimensions beyond conventional win rate, such as ability utilization and advancement efficiency, to assess agents' overall performance within the HLSMAC environment. We integrate state-of-the-art MARL algorithms and LLM-based agents with our benchmark and conduct comprehensive experiments. The results demonstrate that HLSMAC serves as a robust testbed for advancing multi-agent strategic decision-making.
Graph-Based Feature Augmentation for Predictive Tasks on Relational Datasets
Aug 28, 2025



Data has become a foundational asset driving innovation across domains such as finance, healthcare, and e-commerce. In these areas, predictive modeling over relational tables is commonly employed, with increasing emphasis on reducing manual effort through automated machine learning (AutoML) techniques. This raises an interesting question: can feature augmentation itself be automated and identify and utilize task-related relational signals? To address this challenge, we propose an end-to-end automated feature augmentation framework, ReCoGNN, which enhances initial datasets using features extracted from multiple relational tables to support predictive tasks. ReCoGNN first captures semantic dependencies within each table by modeling intra-table attribute relationships, enabling it to partition tables into structured, semantically coherent segments. It then constructs a heterogeneous weighted graph that represents inter-row relationships across all segments. Finally, ReCoGNN leverages message-passing graph neural networks to propagate information through the graph, guiding feature selection and augmenting the original dataset. Extensive experiments conducted on ten real-life and synthetic datasets demonstrate that ReCoGNN consistently outperforms existing methods on both classification and regression tasks.