 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatialEdit: Benchmarking Fine-Grained Image Spatial Editing
Apr 06, 2026Image spatial editing performs geometry-driven transformations, allowing precise control over object layout and camera viewpoints. Current models are insufficient for fine-grained spatial manipulations, motivating a dedicated assessment suite. Our contributions are listed: (i) We introduce SpatialEdit-Bench, a complete benchmark that evaluates spatial editing by jointly measuring perceptual plausibility and geometric fidelity via viewpoint reconstruction and framing analysis. (ii) To address the data bottleneck for scalable training, we construct SpatialEdit-500k, a synthetic dataset generated with a controllable Blender pipeline that renders objects across diverse backgrounds and systematic camera trajectories, providing precise ground-truth transformations for both object- and camera-centric operations. (iii) Building on this data, we develop SpatialEdit-16B, a baseline model for fine-grained spatial editing. Our method achieves competitive performance on general editing while substantially outperforming prior methods on spatial manipulation tasks. All resources will be made public at https://github.com/EasonXiao-888/SpatialEdit.
Detect Anything via Next Point Prediction
Oct 14, 2025Object detection has long been dominated by traditional coordinate regression-based models, such as YOLO, DETR, and Grounding DINO. Although recent efforts have attempted to leverage MLLMs to tackle this task, they face challenges like low recall rate, duplicate predictions, coordinate misalignment, etc. In this work, we bridge this gap and propose Rex-Omni, a 3B-scale MLLM that achieves state-of-the-art object perception performance. On benchmarks like COCO and LVIS, Rex-Omni attains performance comparable to or exceeding regression-based models (e.g., DINO, Grounding DINO) in a zero-shot setting. This is enabled by three key designs: 1) Task Formulation: we use special tokens to represent quantized coordinates from 0 to 999, reducing the model's learning difficulty and improving token efficiency for coordinate prediction; 2) Data Engines: we construct multiple data engines to generate high-quality grounding, referring, and pointing data, providing semantically rich supervision for training; \3) Training Pipelines: we employ a two-stage training process, combining supervised fine-tuning on 22 million data with GRPO-based reinforcement post-training. This RL post-training leverages geometry-aware rewards to effectively bridge the discrete-to-continuous coordinate prediction gap, improve box accuracy, and mitigate undesirable behaviors like duplicate predictions that stem from the teacher-guided nature of the initial SFT stage. Beyond conventional detection, Rex-Omni's inherent language understanding enables versatile capabilities such as object referring, pointing, visual prompting, GUI grounding, spatial referring, OCR and key-pointing, all systematically evaluated on dedicated benchmarks. We believe that Rex-Omni paves the way for more versatile and language-aware visual perception systems.
SegDINO3D: 3D Instance Segmentation Empowered by Both Image-Level and Object-Level 2D Features
Sep 19, 2025In this paper, we present SegDINO3D, a novel Transformer encoder-decoder framework for 3D instance segmentation. As 3D training data is generally not as sufficient as 2D training images, SegDINO3D is designed to fully leverage 2D representation from a pre-trained 2D detection model, including both image-level and object-level features, for improving 3D representation. SegDINO3D takes both a point cloud and its associated 2D images as input. In the encoder stage, it first enriches each 3D point by retrieving 2D image features from its corresponding image views and then leverages a 3D encoder for 3D context fusion. In the decoder stage, it formulates 3D object queries as 3D anchor boxes and performs cross-attention from 3D queries to 2D object queries obtained from 2D images using the 2D detection model. These 2D object queries serve as a compact object-level representation of 2D images, effectively avoiding the challenge of keeping thousands of image feature maps in the memory while faithfully preserving the knowledge of the pre-trained 2D model. The introducing of 3D box queries also enables the model to modulate cross-attention using the predicted boxes for more precise querying. SegDINO3D achieves the state-of-the-art performance on the ScanNetV2 and ScanNet200 3D instance segmentation benchmarks. Notably, on the challenging ScanNet200 dataset, SegDINO3D significantly outperforms prior methods by +8.7 and +6.8 mAP on the validation and hidden test sets, respectively, demonstrating its superiority.
Perceive Anything: Recognize, Explain, Caption, and Segment Anything in Images and Videos
Jun 05, 2025



We present Perceive Anything Model (PAM), a conceptually straightforward and efficient framework for comprehensive region-level visual understanding in images and videos. Our approach extends the powerful segmentation model SAM 2 by integrating Large Language Models (LLMs), enabling simultaneous object segmentation with the generation of diverse, region-specific semantic outputs, including categories, label definition, functional explanations, and detailed captions. A key component, Semantic Perceiver, is introduced to efficiently transform SAM 2's rich visual features, which inherently carry general vision, localization, and semantic priors into multi-modal tokens for LLM comprehension. To support robust multi-granularity understanding, we also develop a dedicated data refinement and augmentation pipeline, yielding a high-quality dataset of 1.5M image and 0.6M video region-semantic annotations, including novel region-level streaming video caption data. PAM is designed for lightweightness and efficiency, while also demonstrates strong performance across a diverse range of region understanding tasks. It runs 1.2-2.4x faster and consumes less GPU memory than prior approaches, offering a practical solution for real-world applications. We believe that our effective approach will serve as a strong baseline for future research in region-level visual understanding.
Referring to Any Person
Mar 11, 2025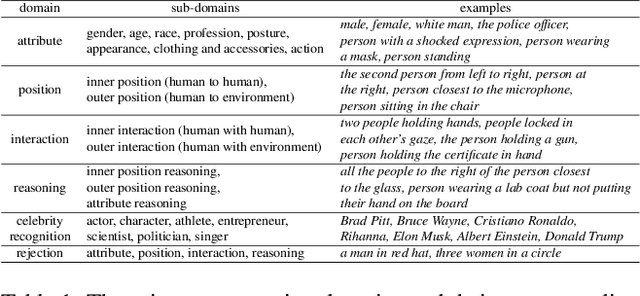
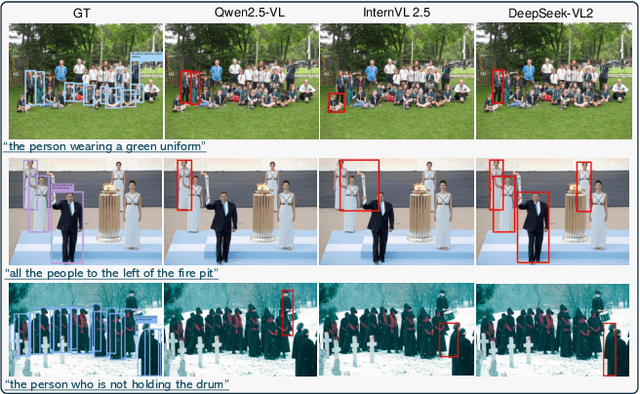
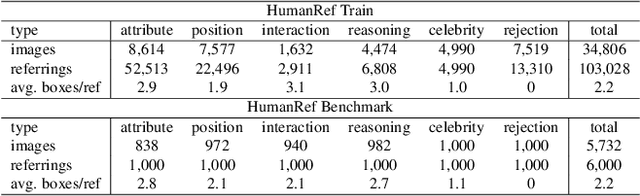
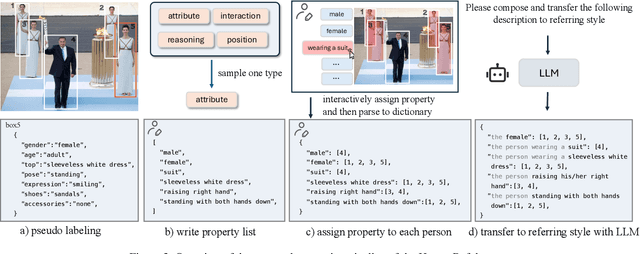
Humans are undoubtedly the most important participants in computer vision, and the ability to detect any individual given a natural language description, a task we define as referring to any person, holds substantial practical value. However, we find that existing models generally fail to achieve real-world usability, and current benchmarks are limited by their focus on one-to-one referring, that hinder progress in this area. In this work, we revisit this task from three critical perspectives: task definition, dataset design, and model architecture. We first identify five aspects of referable entities and three distinctive characteristics of this task. Next, we introduce HumanRef, a novel dataset designed to tackle these challenges and better reflect real-world applications. From a model design perspective, we integrate a multimodal large language model with an object detection framework, constructing a robust referring model named RexSeek. Experimental results reveal that state-of-the-art models, which perform well on commonly used benchmarks like RefCOCO/+/g, struggle with HumanRef due to their inability to detect multiple individuals. In contrast, RexSeek not only excels in human referring but also generalizes effectively to common object referring, making it broadly applicable across various perception tasks. Code is available at https://github.com/IDEA-Research/RexSeek
ChatRex: Taming Multimodal LLM for Joint Perception and Understanding
Dec 02, 2024



Perception and understanding are two pillars of computer vision. While multimodal large language models (MLLM) have demonstrated remarkable visual understanding capabilities, they arguably lack accurate perception abilities, e.g. the stage-of-the-art model Qwen2-VL only achieves a 43.9 recall rate on the COCO dataset, limiting many tasks requiring the combination of perception and understanding. In this work, we aim to bridge this perception gap from both model designing and data development perspectives. We first introduce ChatRex, an MLLM with a decoupled perception design. Instead of having the LLM directly predict box coordinates, we feed the output boxes from a universal proposal network into the LLM, allowing it to output the corresponding box indices to represent its detection results, turning the regression task into a retrieval-based task that LLM handles more proficiently. From the data perspective, we build a fully automated data engine and construct the Rexverse-2M dataset which possesses multiple granularities to support the joint training of perception and understanding. After standard two-stage training, ChatRex demonstrates strong perception capabilities while preserving multimodal understanding performance. The combination of these two capabilities simultaneously unlocks many attractive applications, demonstrating the complementary roles of both perception and understanding in MLLM. Code is available at \url{https://github.com/IDEA-Research/ChatRex}.
TAPTRv3: Spatial and Temporal Context Foster Robust Tracking of Any Point in Long Video
Nov 27, 2024



In this paper, we present TAPTRv3, which is built upon TAPTRv2 to improve its point tracking robustness in long videos. TAPTRv2 is a simple DETR-like framework that can accurately track any point in real-world videos without requiring cost-volume. TAPTRv3 improves TAPTRv2 by addressing its shortage in querying high quality features from long videos, where the target tracking points normally undergo increasing variation over time. In TAPTRv3, we propose to utilize both spatial and temporal context to bring better feature querying along the spatial and temporal dimensions for more robust tracking in long videos. For better spatial feature querying, we present Context-aware Cross-Attention (CCA), which leverages surrounding spatial context to enhance the quality of attention scores when querying image features. For better temporal feature querying, we introduce Visibility-aware Long-Temporal Attention (VLTA) to conduct temporal attention to all past frames while considering their corresponding visibilities, which effectively addresses the feature drifting problem in TAPTRv2 brought by its RNN-like long-temporal modeling. TAPTRv3 surpasses TAPTRv2 by a large margin on most of the challenging datasets and obtains state-of-the-art performance. Even when compared with methods trained with large-scale extra internal data, TAPTRv3 is still competitive.
DINO-X: A Unified Vision Model for Open-World Object Detection and Understanding
Nov 21, 2024



In this paper, we introduce DINO-X, which is a unified object-centric vision model developed by IDEA Research with the best open-world object detection performance to date. DINO-X employs the same Transformer-based encoder-decoder architecture as Grounding DINO 1.5 to pursue an object-level representation for open-world object understanding. To make long-tailed object detection easy, DINO-X extends its input options to support text prompt, visual prompt, and customized prompt. With such flexible prompt options, we develop a universal object prompt to support prompt-free open-world detection, making it possible to detect anything in an image without requiring users to provide any prompt. To enhance the model's core grounding capability, we have constructed a large-scale dataset with over 100 million high-quality grounding samples, referred to as Grounding-100M, for advancing the model's open-vocabulary detection performance. Pre-training on such a large-scale grounding dataset leads to a foundational object-level representation, which enables DINO-X to integrate multiple perception heads to simultaneously support multiple object perception and understanding tasks, including detection, segmentation, pose estimation, object captioning, object-based QA, etc. Experimental results demonstrate the superior performance of DINO-X. Specifically, the DINO-X Pro model achieves 56.0 AP, 59.8 AP, and 52.4 AP on the COCO, LVIS-minival, and LVIS-val zero-shot object detection benchmarks, respectively. Notably, it scores 63.3 AP and 56.5 AP on the rare classes of LVIS-minival and LVIS-val benchmarks, both improving the previous SOTA performance by 5.8 AP. Such a result underscores its significantly improved capacity for recognizing long-tailed objects.
TAPTRv2: Attention-based Position Update Improves Tracking Any Point
Jul 23, 2024



In this paper, we present TAPTRv2, a Transformer-based approach built upon TAPTR for solving the Tracking Any Point (TAP) task. TAPTR borrows designs from DEtection TRansformer (DETR) and formulates each tracking point as a point query, making it possible to leverage well-studied operations in DETR-like algorithms. TAPTRv2 improves TAPTR by addressing a critical issue regarding its reliance on cost-volume,which contaminates the point query\'s content feature and negatively impacts both visibility prediction and cost-volume computation. In TAPTRv2, we propose a novel attention-based position update (APU) operation and use key-aware deformable attention to realize. For each query, this operation uses key-aware attention weights to combine their corresponding deformable sampling positions to predict a new query position. This design is based on the observation that local attention is essentially the same as cost-volume, both of which are computed by dot-production between a query and its surrounding features. By introducing this new operation, TAPTRv2 not only removes the extra burden of cost-volume computation, but also leads to a substantial performance improvement. TAPTRv2 surpasses TAPTR and achieves state-of-the-art performance on many challenging datasets, demonstrating the superiority
Grounding DINO 1.5: Advance the "Edge" of Open-Set Object Detection
May 16, 2024



This paper introduces Grounding DINO 1.5, a suite of advanced open-set object detection models developed by IDEA Research, which aims to advance the "Edge" of open-set object detection. The suite encompasses two models: Grounding DINO 1.5 Pro, a high-performance model designed for stronger generalization capability across a wide range of scenarios, and Grounding DINO 1.5 Edge, an efficient model optimized for faster speed demanded in many applications requiring edge deployment. The Grounding DINO 1.5 Pro model advances its predecessor by scaling up the model architecture, integrating an enhanced vision backbone, and expanding the training dataset to over 20 million images with grounding annotations, thereby achieving a richer semantic understanding. The Grounding DINO 1.5 Edge model, while designed for efficiency with reduced feature scales, maintains robust detection capabilities by being trained on the same comprehensive dataset. Empirical results demonstrate the effectiveness of Grounding DINO 1.5, with the Grounding DINO 1.5 Pro model attaining a 54.3 AP on the COCO detection benchmark and a 55.7 AP on the LVIS-minival zero-shot transfer benchmark, setting new records for open-set object detection. Furthermore, the Grounding DINO 1.5 Edge model, when optimized with TensorRT, achieves a speed of 75.2 FPS while attaining a zero-shot performance of 36.2 AP on the LVIS-minival benchmark, making it more suitable for edge computing scenarios. Model examples and demos with API will be released at https://github.com/IDEA-Research/Grounding-DINO-1.5-API