 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLAFP: Preserving Latent Action Structure in Latent Policy Learning via Flow Matching
Jun 09, 2026Learning high-quality latent actions from large-scale unlabeled videos, coupled with limited real-world interaction data for training an action decoder, has emerged as a promising paradigm for scalable latent policy learning. However, existing approaches typically rely on behavior cloning, which tends to collapse inherently multimodal action distributions into unimodal ones, thereby degrading the pretrained latent action structure. While flow matching provides a potential alternative, directly applying it leads to a misalignment between latent actions and physical actions during action decoder training, due to the stochastic nature of the learned policy. To address these, we propose Latent Action Flow Policy (LAFP), which leverages flow matching for latent policy learning and introduces an inference-time interpolation mechanism to mitigate stochasticity-induced misalignment. Experimental results demonstrate that LAFP consistently outperforms prior methods on downstream imitation learning tasks, achieving up to 10-15% improvement in success rate while incurring less than 1x additional inference overhead.
Implicit Drifting Policy: One-Step Action Generation via Conditional Expert Geometry
May 31, 2026Generative action policies based on diffusion or flow matching excel in behavior cloning, yet their iterative sampling is prohibitive for high-frequency robot control. While recent one-step formulations alleviate this latency, they inevitably discard the intermediate trajectory evolution that provides crucial action correction. Directly recovering this mechanism by explicitly estimating a training-time drifting field is mathematically ill-posed due to extreme conditional demonstration sparsity. We introduce Implicit Drifting Policy (IDP), a one-step imitation learning framework that brings the training-time correction of Drifting into policy learning without explicit vector field estimation. IDP extracts a conditional expert geometry from the local variation of observation-similar expert actions, and compares it against a global reference geometry to isolate condition-specific constraints. This local geometric structure adaptively weights a scalar potential objective. Combined with an expert-proximal terminal evaluation, IDP directly enforces manifold constraints on the one-step generator during training. Extensive evaluations across 2D, 3D, and real-world manipulation tasks show IDP effectively maintains adherence to valid action manifolds, improving upon explicit drifting methods and achieving competitive performance with strong one-step baselines.
Data-Asymmetric Latent Imagination and Reranking for 3D Robotic Imitation Learning
May 11, 2026Robotic imitation learning typically assumes access to optimal demonstrations, yet real-world data collection often yields suboptimal, exploratory, or even failed trajectories. Discarding such data wastes valuable information about environment dynamics and failure modes, which can instead be leveraged to improve decision-making. While 3D policies reduce reliance on high-quality demonstrations through strong spatial generalization, they still require large-scale data to achieve high task success. To address this, we propose DALI-R, a Data-Asymmetric Latent Imagination and Reranking framework for 3D robotic imitation learning from mixed-quality trajectories. It learns a Latent World Model over 3D point clouds for imagined rollouts and a Task Completion Scorer that reranks candidate action chunks, improving decision-making without additional high-quality demonstrations. We instantiate DALI-R with both diffusion and efficient flow-matching policies and evaluate it on Adroit and MetaWorld benchmarks. Across the two evaluated 3D base policies, DALI-R achieves an average $6.8$\% improvement in success rate while incurring less than $0.7\times$ additional inference overhead.
From Noise to Intent: Anchoring Generative VLA Policies with Residual Bridges
Apr 23, 2026Bridging high-level semantic understanding with low-level physical control remains a persistent challenge in embodied intelligence, stemming from the fundamental spatiotemporal scale mismatch between cognition and action. Existing generative VLA policies typically adopt a "Generation-from-Noise" paradigm, which disregards this disparity, leading to representation inefficiency and weak condition alignment during optimization. In this work, we propose ResVLA, an architecture that shifts the paradigm to "Refinement-from-Intent." Recognizing that robotic motion naturally decomposes into global intent and local dynamics, ResVLA utilizes spectral analysis to decouple control into a deterministic low-frequency anchor and a stochastic high-frequency residual. By anchoring the generative process on the predicted intent, our model focuses strictly on refining local dynamics via a residual diffusion bridge. Extensive simulation experiments show that ResVLA achieves competitive performance, strong robustness to language and robot embodiment perturbations, and faster convergence than standard generative baselines. It also demonstrates strong performance in real-world robot experiments.
STAGE: A Stream-Centric Generative World Model for Long-Horizon Driving-Scene Simulation
Jun 16, 2025The generation of temporally consistent, high-fidelity driving videos over extended horizons presents a fundamental challenge in autonomous driving world modeling. Existing approaches often suffer from error accumulation and feature misalignment due to inadequate decoupling of spatio-temporal dynamics and limited cross-frame feature propagation mechanisms. To address these limitations, we present STAGE (Streaming Temporal Attention Generative Engine), a novel auto-regressive framework that pioneers hierarchical feature coordination and multi-phase optimization for sustainable video synthesis. To achieve high-quality long-horizon driving video generation, we introduce Hierarchical Temporal Feature Transfer (HTFT) and a novel multi-stage training strategy. HTFT enhances temporal consistency between video frames throughout the video generation process by modeling the temporal and denoising process separately and transferring denoising features between frames. The multi-stage training strategy is to divide the training into three stages, through model decoupling and auto-regressive inference process simulation, thereby accelerating model convergence and reducing error accumulation. Experiments on the Nuscenes dataset show that STAGE has significantly surpassed existing methods in the long-horizon driving video generation task. In addition, we also explored STAGE's ability to generate unlimited-length driving videos. We generated 600 frames of high-quality driving videos on the Nuscenes dataset, which far exceeds the maximum length achievable by existing methods.
PARTNER: Level up the Polar Representation for LiDAR 3D Object Detection
Aug 08, 2023



Recently, polar-based representation has shown promising properties in perceptual tasks. In addition to Cartesian-based approaches, which separate point clouds unevenly, representing point clouds as polar grids has been recognized as an alternative due to (1) its advantage in robust performance under different resolutions and (2) its superiority in streaming-based approaches. However, state-of-the-art polar-based detection methods inevitably suffer from the feature distortion problem because of the non-uniform division of polar representation, resulting in a non-negligible performance gap compared to Cartesian-based approaches. To tackle this issue, we present PARTNER, a novel 3D object detector in the polar coordinate. PARTNER alleviates the dilemma of feature distortion with global representation re-alignment and facilitates the regression by introducing instance-level geometric information into the detection head. Extensive experiments show overwhelming advantages in streaming-based detection and different resolutions. Furthermore, our method outperforms the previous polar-based works with remarkable margins of 3.68% and 9.15% on Waymo and ONCE validation set, thus achieving competitive results over the state-of-the-art methods.
CLIP$^2$: Contrastive Language-Image-Point Pretraining from Real-World Point Cloud Data
Mar 26, 2023



Contrastive Language-Image Pre-training, benefiting from large-scale unlabeled text-image pairs, has demonstrated great performance in open-world vision understanding tasks. However, due to the limited Text-3D data pairs, adapting the success of 2D Vision-Language Models (VLM) to the 3D space remains an open problem. Existing works that leverage VLM for 3D understanding generally resort to constructing intermediate 2D representations for the 3D data, but at the cost of losing 3D geometry information. To take a step toward open-world 3D vision understanding, we propose Contrastive Language-Image-Point Cloud Pretraining (CLIP$^2$) to directly learn the transferable 3D point cloud representation in realistic scenarios with a novel proxy alignment mechanism. Specifically, we exploit naturally-existed correspondences in 2D and 3D scenarios, and build well-aligned and instance-based text-image-point proxies from those complex scenarios. On top of that, we propose a cross-modal contrastive objective to learn semantic and instance-level aligned point cloud representation. Experimental results on both indoor and outdoor scenarios show that our learned 3D representation has great transfer ability in downstream tasks, including zero-shot and few-shot 3D recognition, which boosts the state-of-the-art methods by large margins. Furthermore, we provide analyses of the capability of different representations in real scenarios and present the optional ensemble scheme.
TransFusion: Robust LiDAR-Camera Fusion for 3D Object Detection with Transformers
Mar 22, 2022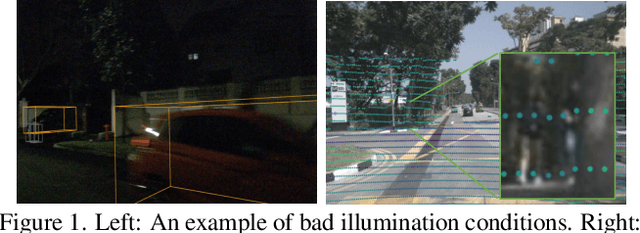
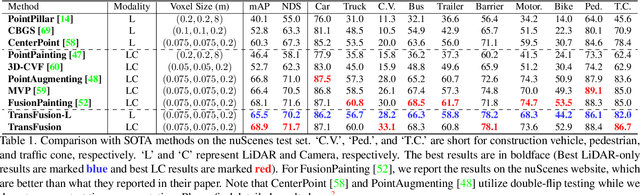
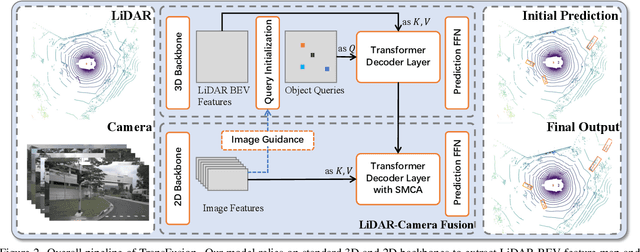
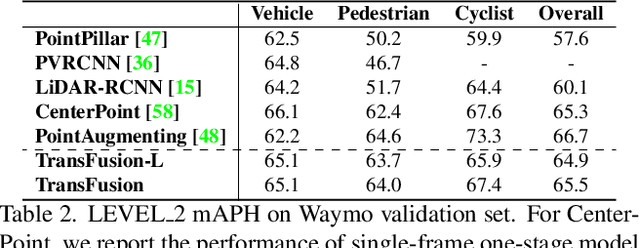
LiDAR and camera are two important sensors for 3D object detection in autonomous driving. Despite the increasing popularity of sensor fusion in this field, the robustness against inferior image conditions, e.g., bad illumination and sensor misalignment, is under-explored. Existing fusion methods are easily affected by such conditions, mainly due to a hard association of LiDAR points and image pixels, established by calibration matrices. We propose TransFusion, a robust solution to LiDAR-camera fusion with a soft-association mechanism to handle inferior image conditions. Specifically, our TransFusion consists of convolutional backbones and a detection head based on a transformer decoder. The first layer of the decoder predicts initial bounding boxes from a LiDAR point cloud using a sparse set of object queries, and its second decoder layer adaptively fuses the object queries with useful image features, leveraging both spatial and contextual relationships. The attention mechanism of the transformer enables our model to adaptively determine where and what information should be taken from the image, leading to a robust and effective fusion strategy. We additionally design an image-guided query initialization strategy to deal with objects that are difficult to detect in point clouds. TransFusion achieves state-of-the-art performance on large-scale datasets. We provide extensive experiments to demonstrate its robustness against degenerated image quality and calibration errors. We also extend the proposed method to the 3D tracking task and achieve the 1st place in the leaderboard of nuScenes tracking, showing its effectiveness and generalization capability.
Adversarial Robustness under Long-Tailed Distribution
Apr 06, 2021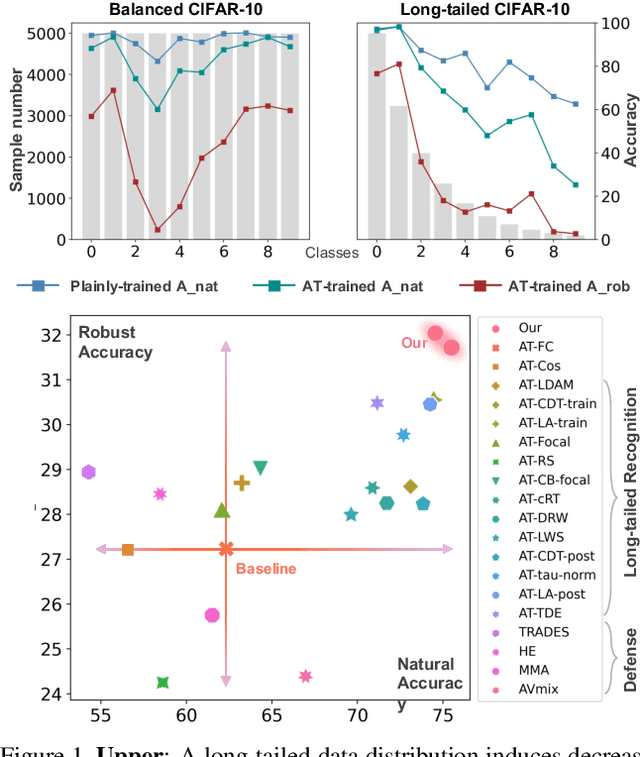
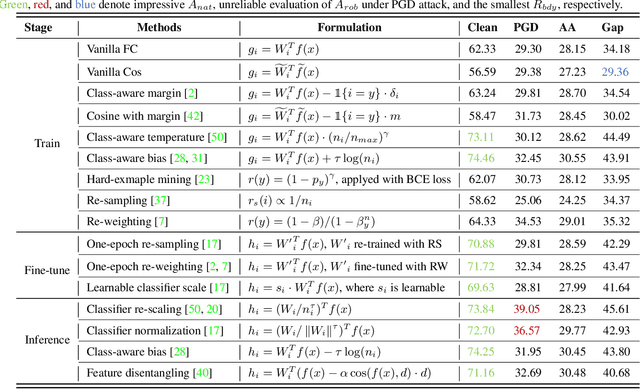
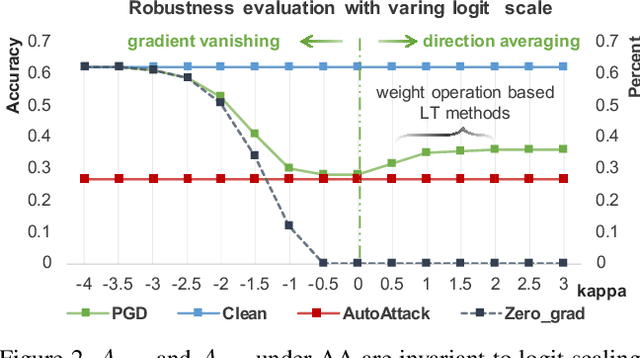
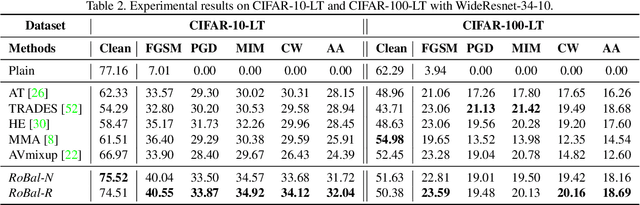
Adversarial robustness has attracted extensive studies recently by revealing the vulnerability and intrinsic characteristics of deep networks. However, existing works on adversarial robustness mainly focus on balanced datasets, while real-world data usually exhibits a long-tailed distribution. To push adversarial robustness towards more realistic scenarios, in this work we investigate the adversarial vulnerability as well as defense under long-tailed distributions. In particular, we first reveal the negative impacts induced by imbalanced data on both recognition performance and adversarial robustness, uncovering the intrinsic challenges of this problem. We then perform a systematic study on existing long-tailed recognition methods in conjunction with the adversarial training framework. Several valuable observations are obtained: 1) natural accuracy is relatively easy to improve, 2) fake gain of robust accuracy exists under unreliable evaluation, and 3) boundary error limits the promotion of robustness. Inspired by these observations, we propose a clean yet effective framework, RoBal, which consists of two dedicated modules, a scale-invariant classifier and data re-balancing via both margin engineering at training stage and boundary adjustment during inference. Extensive experiments demonstrate the superiority of our approach over other state-of-the-art defense methods. To our best knowledge, we are the first to tackle adversarial robustness under long-tailed distributions, which we believe would be a significant step towards real-world robustness. Our code is available at: https://github.com/wutong16/Adversarial_Long-Tail .
A Unified Framework for Shot Type Classification Based on Subject Centric Lens
Aug 08, 2020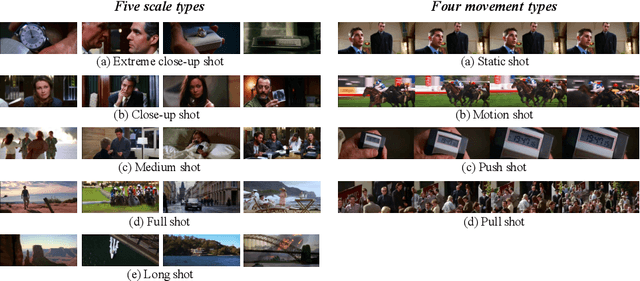
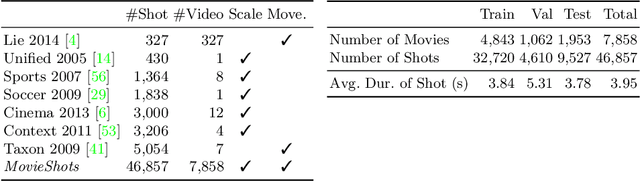

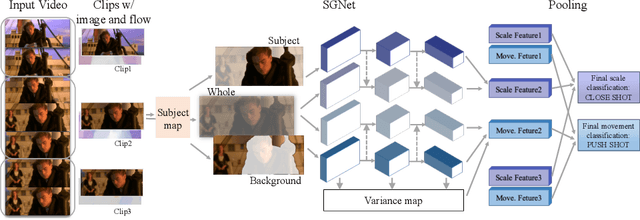
Shots are key narrative elements of various videos, e.g. movies, TV series, and user-generated videos that are thriving over the Internet. The types of shots greatly influence how the underlying ideas, emotions, and messages are expressed. The technique to analyze shot types is important to the understanding of videos, which has seen increasing demand in real-world applications in this era. Classifying shot type is challenging due to the additional information required beyond the video content, such as the spatial composition of a frame and camera movement. To address these issues, we propose a learning framework Subject Guidance Network (SGNet) for shot type recognition. SGNet separates the subject and background of a shot into two streams, serving as separate guidance maps for scale and movement type classification respectively. To facilitate shot type analysis and model evaluations, we build a large-scale dataset MovieShots, which contains 46K shots from 7K movie trailers with annotations of their scale and movement types. Experiments show that our framework is able to recognize these two attributes of shot accurately, outperforming all the previous methods.