 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
Token-Shuffle: Towards High-Resolution Image Generation with Autoregressive Models
Apr 24, 2025Autoregressive (AR) models, long dominant in language generation, are increasingly applied to image synthesis but are often considered less competitive than Diffusion-based models. A primary limitation is the substantial number of image tokens required for AR models, which constrains both training and inference efficiency, as well as image resolution. To address this, we present Token-Shuffle, a novel yet simple method that reduces the number of image tokens in Transformer. Our key insight is the dimensional redundancy of visual vocabularies in Multimodal Large Language Models (MLLMs), where low-dimensional visual codes from visual encoder are directly mapped to high-dimensional language vocabularies. Leveraging this, we consider two key operations: token-shuffle, which merges spatially local tokens along channel dimension to decrease the input token number, and token-unshuffle, which untangles the inferred tokens after Transformer blocks to restore the spatial arrangement for output. Jointly training with textual prompts, our strategy requires no additional pretrained text-encoder and enables MLLMs to support extremely high-resolution image synthesis in a unified next-token prediction way while maintaining efficient training and inference. For the first time, we push the boundary of AR text-to-image generation to a resolution of 2048x2048 with gratifying generation performance. In GenAI-benchmark, our 2.7B model achieves 0.77 overall score on hard prompts, outperforming AR models LlamaGen by 0.18 and diffusion models LDM by 0.15. Exhaustive large-scale human evaluations also demonstrate our prominent image generation ability in terms of text-alignment, visual flaw, and visual appearance. We hope that Token-Shuffle can serve as a foundational design for efficient high-resolution image generation within MLLMs.
Perception Encoder: The best visual embeddings are not at the output of the network
Apr 17, 2025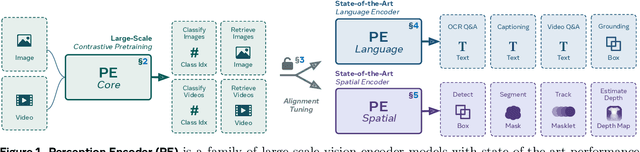

We introduce Perception Encoder (PE), a state-of-the-art encoder for image and video understanding trained via simple vision-language learning. Traditionally, vision encoders have relied on a variety of pretraining objectives, each tailored to specific downstream tasks such as classification, captioning, or localization. Surprisingly, after scaling our carefully tuned image pretraining recipe and refining with our robust video data engine, we find that contrastive vision-language training alone can produce strong, general embeddings for all of these downstream tasks. There is only one caveat: these embeddings are hidden within the intermediate layers of the network. To draw them out, we introduce two alignment methods, language alignment for multimodal language modeling, and spatial alignment for dense prediction. Together with the core contrastive checkpoint, our PE family of models achieves state-of-the-art performance on a wide variety of tasks, including zero-shot image and video classification and retrieval; document, image, and video Q&A; and spatial tasks such as detection, depth estimation, and tracking. To foster further research, we are releasing our models, code, and a novel dataset of synthetically and human-annotated videos.
PerceptionLM: Open-Access Data and Models for Detailed Visual Understanding
Apr 17, 2025



Vision-language models are integral to computer vision research, yet many high-performing models remain closed-source, obscuring their data, design and training recipe. The research community has responded by using distillation from black-box models to label training data, achieving strong benchmark results, at the cost of measurable scientific progress. However, without knowing the details of the teacher model and its data sources, scientific progress remains difficult to measure. In this paper, we study building a Perception Language Model (PLM) in a fully open and reproducible framework for transparent research in image and video understanding. We analyze standard training pipelines without distillation from proprietary models and explore large-scale synthetic data to identify critical data gaps, particularly in detailed video understanding. To bridge these gaps, we release 2.8M human-labeled instances of fine-grained video question-answer pairs and spatio-temporally grounded video captions. Additionally, we introduce PLM-VideoBench, a suite for evaluating challenging video understanding tasks focusing on the ability to reason about "what", "where", "when", and "how" of a video. We make our work fully reproducible by providing data, training recipes, code & models.
PixelFlow: Pixel-Space Generative Models with Flow
Apr 10, 2025



We present PixelFlow, a family of image generation models that operate directly in the raw pixel space, in contrast to the predominant latent-space models. This approach simplifies the image generation process by eliminating the need for a pre-trained Variational Autoencoder (VAE) and enabling the whole model end-to-end trainable. Through efficient cascade flow modeling, PixelFlow achieves affordable computation cost in pixel space. It achieves an FID of 1.98 on 256$\times$256 ImageNet class-conditional image generation benchmark. The qualitative text-to-image results demonstrate that PixelFlow excels in image quality, artistry, and semantic control. We hope this new paradigm will inspire and open up new opportunities for next-generation visual generation models. Code and models are available at https://github.com/ShoufaChen/PixelFlow.
Goku: Flow Based Video Generative Foundation Models
Feb 10, 2025



This paper introduces Goku, a state-of-the-art family of joint image-and-video generation models leveraging rectified flow Transformers to achieve industry-leading performance. We detail the foundational elements enabling high-quality visual generation, including the data curation pipeline, model architecture design, flow formulation, and advanced infrastructure for efficient and robust large-scale training. The Goku models demonstrate superior performance in both qualitative and quantitative evaluations, setting new benchmarks across major tasks. Specifically, Goku achieves 0.76 on GenEval and 83.65 on DPG-Bench for text-to-image generation, and 84.85 on VBench for text-to-video tasks. We believe that this work provides valuable insights and practical advancements for the research community in developing joint image-and-video generation models.
FlashVideo:Flowing Fidelity to Detail for Efficient High-Resolution Video Generation
Feb 07, 2025DiT diffusion models have achieved great success in text-to-video generation, leveraging their scalability in model capacity and data scale. High content and motion fidelity aligned with text prompts, however, often require large model parameters and a substantial number of function evaluations (NFEs). Realistic and visually appealing details are typically reflected in high resolution outputs, further amplifying computational demands especially for single stage DiT models. To address these challenges, we propose a novel two stage framework, FlashVideo, which strategically allocates model capacity and NFEs across stages to balance generation fidelity and quality. In the first stage, prompt fidelity is prioritized through a low resolution generation process utilizing large parameters and sufficient NFEs to enhance computational efficiency. The second stage establishes flow matching between low and high resolutions, effectively generating fine details with minimal NFEs. Quantitative and visual results demonstrate that FlashVideo achieves state-of-the-art high resolution video generation with superior computational efficiency. Additionally, the two-stage design enables users to preview the initial output before committing to full resolution generation, thereby significantly reducing computational costs and wait times as well as enhancing commercial viability .
Prompt-A-Video: Prompt Your Video Diffusion Model via Preference-Aligned LLM
Dec 19, 2024



Text-to-video models have made remarkable advancements through optimization on high-quality text-video pairs, where the textual prompts play a pivotal role in determining quality of output videos. However, achieving the desired output often entails multiple revisions and iterative inference to refine user-provided prompts. Current automatic methods for refining prompts encounter challenges such as Modality-Inconsistency, Cost-Discrepancy, and Model-Unaware when applied to text-to-video diffusion models. To address these problem, we introduce an LLM-based prompt adaptation framework, termed as Prompt-A-Video, which excels in crafting Video-Centric, Labor-Free and Preference-Aligned prompts tailored to specific video diffusion model. Our approach involves a meticulously crafted two-stage optimization and alignment system. Initially, we conduct a reward-guided prompt evolution pipeline to automatically create optimal prompts pool and leverage them for supervised fine-tuning (SFT) of the LLM. Then multi-dimensional rewards are employed to generate pairwise data for the SFT model, followed by the direct preference optimization (DPO) algorithm to further facilitate preference alignment. Through extensive experimentation and comparative analyses, we validate the effectiveness of Prompt-A-Video across diverse generation models, highlighting its potential to push the boundaries of video generation.
Toward Guidance-Free AR Visual Generation via Condition Contrastive Alignment
Oct 12, 2024



Classifier-Free Guidance (CFG) is a critical technique for enhancing the sample quality of visual generative models. However, in autoregressive (AR) multi-modal generation, CFG introduces design inconsistencies between language and visual content, contradicting the design philosophy of unifying different modalities for visual AR. Motivated by language model alignment methods, we propose \textit{Condition Contrastive Alignment} (CCA) to facilitate guidance-free AR visual generation with high performance and analyze its theoretical connection with guided sampling methods. Unlike guidance methods that alter the sampling process to achieve the ideal sampling distribution, CCA directly fine-tunes pretrained models to fit the same distribution target. Experimental results show that CCA can significantly enhance the guidance-free performance of all tested models with just one epoch of fine-tuning ($\sim$ 1\% of pretraining epochs) on the pretraining dataset, on par with guided sampling methods. This largely removes the need for guided sampling in AR visual generation and cuts the sampling cost by half. Moreover, by adjusting training parameters, CCA can achieve trade-offs between sample diversity and fidelity similar to CFG. This experimentally confirms the strong theoretical connection between language-targeted alignment and visual-targeted guidance methods, unifying two previously independent research fields. Code and model weights: https://github.com/thu-ml/CCA.
ControlAR: Controllable Image Generation with Autoregressive Models
Oct 03, 2024



Autoregressive (AR) models have reformulated image generation as next-token prediction, demonstrating remarkable potential and emerging as strong competitors to diffusion models. However, control-to-image generation, akin to ControlNet, remains largely unexplored within AR models. Although a natural approach, inspired by advancements in Large Language Models, is to tokenize control images into tokens and prefill them into the autoregressive model before decoding image tokens, it still falls short in generation quality compared to ControlNet and suffers from inefficiency. To this end, we introduce ControlAR, an efficient and effective framework for integrating spatial controls into autoregressive image generation models. Firstly, we explore control encoding for AR models and propose a lightweight control encoder to transform spatial inputs (e.g., canny edges or depth maps) into control tokens. Then ControlAR exploits the conditional decoding method to generate the next image token conditioned on the per-token fusion between control and image tokens, similar to positional encodings. Compared to prefilling tokens, using conditional decoding significantly strengthens the control capability of AR models but also maintains the model's efficiency. Furthermore, the proposed ControlAR surprisingly empowers AR models with arbitrary-resolution image generation via conditional decoding and specific controls. Extensive experiments can demonstrate the controllability of the proposed ControlAR for the autoregressive control-to-image generation across diverse inputs, including edges, depths, and segmentation masks. Furthermore, both quantitative and qualitative results indicate that ControlAR surpasses previous state-of-the-art controllable diffusion models, e.g., ControlNet++. Code, models, and demo will soon be available at https://github.com/hustvl/ControlAR.