 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaling Self-Play with Self-Guidance
Apr 22, 2026LLM self-play algorithms are notable in that, in principle, nothing bounds their learning: a Conjecturer model creates problems for a Solver, and both improve together. However, in practice, existing LLM self-play methods do not scale well with large amounts of compute, instead hitting learning plateaus. We argue this is because over long training runs, the Conjecturer learns to hack its reward, collapsing to artificially complex problems that do not help the Solver improve. To overcome this, we introduce Self-Guided Self-Play (SGS), a self-play algorithm in which the language model itself guides the Conjecturer away from degeneracy. In SGS, the model takes on three roles: Solver, Conjecturer, and a Guide that scores synthetic problems by their relevance to unsolved target problems and how clean and natural they are, providing supervision against Conjecturer collapse. Our core hypothesis is that language models can assess whether a subproblem is useful for achieving a goal. We evaluate the scaling properties of SGS by running training for significantly longer than prior works and by fitting scaling laws to cumulative solve rate curves. Applying SGS to formal theorem proving in Lean4, we find that it surpasses the asymptotic solve rate of our strongest RL baseline in fewer than 80 rounds of self-play and enables a 7B parameter model, after 200 rounds of self-play, to solve more problems than a 671B parameter model pass@4.
Configuration-to-Performance Scaling Law with Neural Ansatz
Feb 10, 2026Researchers build scaling laws to forecast the training performance of expensive large-scale runs with larger model size N and data size D. These laws assume that other training hyperparameters are optimally chosen, which can require significant effort and, in some cases, be impossible due to external hardware constraints. To improve predictability across a broader set of hyperparameters and enable simpler tuning at scale, we propose learning a \textit{Configuration-to-Performance Scaling Law} (CPL): a mapping from the \textit{full training configuration} to training performance. Because no simple functional form can express this mapping, we parameterize it with a large language model (LLM), and fit it with diverse open-source pretraining logs across multiple sources, yielding a \textit{Neural} Configuration-to-Performance Scaling Law (NCPL). NCPL accurately predicts how training configurations influence the final pretraining loss, achieving 20-40% lower prediction error than the configuration-agnostic Chinchilla law and generalizing to runs using up to 10 x more compute than any run in the training set. It further supports joint tuning of multiple hyperparameters with performance comparable to hyperparameter scaling law baselines. Finally, NCPL naturally and effectively extends to richer prediction targets such as loss-curve prediction.
Divide-and-Conquer CoT: RL for Reducing Latency via Parallel Reasoning
Jan 30, 2026Long chain-of-thought reasoning (Long CoT) is now fundamental to state-of-the-art LLMs, especially in mathematical reasoning. However, LLM generation is highly sequential, and long CoTs lead to a high latency. We propose to train Divide-and-Conquer CoT (DC-CoT) to reduce the latency. With DC-CoT, the model can act as a director that identifies distinct subtasks that can be performed in parallel in its reasoning process, and then spawns workers to execute the subtasks. Our goal is to achieve high accuracy, with a low longest path length, which is a theoretical measure of the latency needed for the response. We start with a long CoT base model (DeepScaleR-1.5B-Preview), and first use SFT with a small curated demonstration set to initialize its ability to spawn workers in a certain format. Because SFT degrades the accuracy significantly, we design a multi-stage RL algorithm, with various data filtering strategies, to recover the accuracy while decreasing the longest path length. Across several benchmarks including AIME 2024 and HMMT 2025, DC-CoT achieves similar accuracy as DeepScaleR-1.5B-Preview while decreasing longest path length by 35-40%. Our code, SFT dataset and models are publicly available at https://github.com/amahankali10/DC_CoT_RL_for_Low_Latency_CoT_with_Parallel_Reasoning.
PerceptionLM: Open-Access Data and Models for Detailed Visual Understanding
Apr 17, 2025



Vision-language models are integral to computer vision research, yet many high-performing models remain closed-source, obscuring their data, design and training recipe. The research community has responded by using distillation from black-box models to label training data, achieving strong benchmark results, at the cost of measurable scientific progress. However, without knowing the details of the teacher model and its data sources, scientific progress remains difficult to measure. In this paper, we study building a Perception Language Model (PLM) in a fully open and reproducible framework for transparent research in image and video understanding. We analyze standard training pipelines without distillation from proprietary models and explore large-scale synthetic data to identify critical data gaps, particularly in detailed video understanding. To bridge these gaps, we release 2.8M human-labeled instances of fine-grained video question-answer pairs and spatio-temporally grounded video captions. Additionally, we introduce PLM-VideoBench, a suite for evaluating challenging video understanding tasks focusing on the ability to reason about "what", "where", "when", and "how" of a video. We make our work fully reproducible by providing data, training recipes, code & models.
Perception Encoder: The best visual embeddings are not at the output of the network
Apr 17, 2025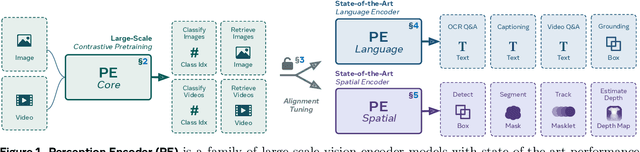

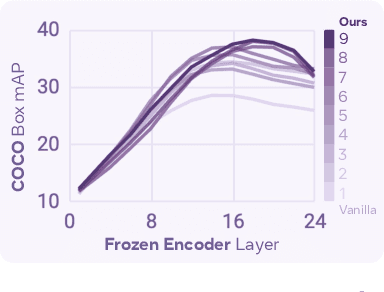
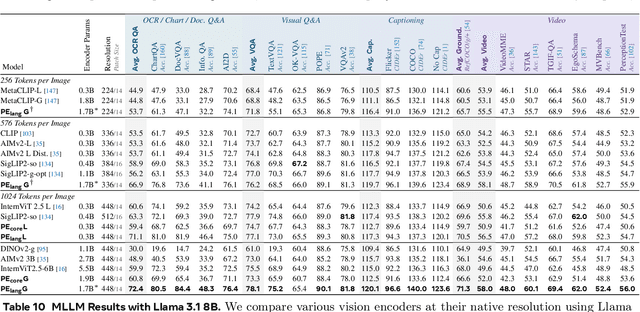
We introduce Perception Encoder (PE), a state-of-the-art encoder for image and video understanding trained via simple vision-language learning. Traditionally, vision encoders have relied on a variety of pretraining objectives, each tailored to specific downstream tasks such as classification, captioning, or localization. Surprisingly, after scaling our carefully tuned image pretraining recipe and refining with our robust video data engine, we find that contrastive vision-language training alone can produce strong, general embeddings for all of these downstream tasks. There is only one caveat: these embeddings are hidden within the intermediate layers of the network. To draw them out, we introduce two alignment methods, language alignment for multimodal language modeling, and spatial alignment for dense prediction. Together with the core contrastive checkpoint, our PE family of models achieves state-of-the-art performance on a wide variety of tasks, including zero-shot image and video classification and retrieval; document, image, and video Q&A; and spatial tasks such as detection, depth estimation, and tracking. To foster further research, we are releasing our models, code, and a novel dataset of synthetically and human-annotated videos.
Formal Theorem Proving by Rewarding LLMs to Decompose Proofs Hierarchically
Nov 04, 2024



Mathematical theorem proving is an important testbed for large language models' deep and abstract reasoning capability. This paper focuses on improving LLMs' ability to write proofs in formal languages that permit automated proof verification/evaluation. Most previous results provide human-written lemmas to the theorem prover, which is an arguably oversimplified setting that does not sufficiently test the provers' planning and decomposition capabilities. Instead, we work in a more natural setup where the lemmas that are directly relevant to the theorem are not given to the theorem prover at test time. We design an RL-based training algorithm that encourages the model to decompose a theorem into lemmas, prove the lemmas, and then prove the theorem by using the lemmas. Our reward mechanism is inspired by how mathematicians train themselves: even if a theorem is too challenging to be proved by the current model, a positive reward is still given to the model for any correct and novel lemmas that are proposed and proved in this process. During training, our model proposes and proves lemmas that are not in the training dataset. In fact, these newly-proposed correct lemmas consist of 37.7% of the training replay buffer when we train on the dataset extracted from Archive of Formal Proofs (AFP). The model trained by our RL algorithm outperforms that trained by supervised finetuning, improving the pass rate from 40.8% to 45.5% on AFP test set, and from 36.5% to 39.5% on an out-of-distribution test set.
Understanding Warmup-Stable-Decay Learning Rates: A River Valley Loss Landscape Perspective
Oct 07, 2024



Training language models currently requires pre-determining a fixed compute budget because the typical cosine learning rate schedule depends on the total number of steps. In contrast, the Warmup-Stable-Decay (WSD) schedule uses a constant learning rate to produce a main branch of iterates that can in principle continue indefinitely without a pre-specified compute budget. Then, given any compute budget, one can branch out from the main branch at a proper at any time with a rapidly decaying learning rate to produce a strong model. Empirically, WSD generates a non-traditional loss curve: the loss remains elevated during the stable phase but sharply declines during the decay phase. Towards explaining this phenomenon, we conjecture that pretraining loss exhibits a river valley landscape, which resembles a deep valley with a river at its bottom. Under this assumption, we show that during the stable phase, the iterate undergoes large oscillations due to the high learning rate, yet it progresses swiftly along the river. During the decay phase, the rapidly dropping learning rate minimizes the iterate's oscillations, moving it closer to the river and revealing true optimization progress. Therefore, the sustained high learning rate phase and fast decaying phase are responsible for progress in the river and the mountain directions respectively, and are both critical. Our analysis predicts phenomenons consistent with empirical observations and shows that this landscape can emerge from pretraining on a simple bi-gram dataset. Inspired by the theory, we introduce WSD-S, a variant of WSD that reuses previous checkpoints' decay phases and keeps only one main branch, where we resume from a decayed checkpoint. WSD-S empirically outperforms WSD and Cyclic-Cosine in obtaining multiple language model checkpoints across various compute budgets in a single run for parameters scaling from 0.1B to 1.2B.
SAM 2: Segment Anything in Images and Videos
Aug 01, 2024



We present Segment Anything Model 2 (SAM 2), a foundation model towards solving promptable visual segmentation in images and videos. We build a data engine, which improves model and data via user interaction, to collect the largest video segmentation dataset to date. Our model is a simple transformer architecture with streaming memory for real-time video processing. SAM 2 trained on our data provides strong performance across a wide range of tasks. In video segmentation, we observe better accuracy, using 3x fewer interactions than prior approaches. In image segmentation, our model is more accurate and 6x faster than the Segment Anything Model (SAM). We believe that our data, model, and insights will serve as a significant milestone for video segmentation and related perception tasks. We are releasing a version of our model, the dataset and an interactive demo.
Linguistic Calibration of Language Models
Mar 30, 2024



Language models (LMs) may lead their users to make suboptimal downstream decisions when they confidently hallucinate. This issue can be mitigated by having the LM verbally convey the probability that its claims are correct, but existing models cannot produce text with calibrated confidence statements. Through the lens of decision-making, we formalize linguistic calibration for long-form generations: an LM is linguistically calibrated if its generations enable its users to make calibrated probabilistic predictions. This definition enables a training framework where a supervised finetuning step bootstraps an LM to emit long-form generations with confidence statements such as "I estimate a 30% chance of..." or "I am certain that...", followed by a reinforcement learning step which rewards generations that enable a user to provide calibrated answers to related questions. We linguistically calibrate Llama 2 7B and find in automated and human evaluations of long-form generations that it is significantly more calibrated than strong finetuned factuality baselines with comparable accuracy. These findings generalize under distribution shift on question-answering and under a significant task shift to person biography generation. Our results demonstrate that long-form generations may be calibrated end-to-end by constructing an objective in the space of the predictions that users make in downstream decision-making.
Chain of Thought Empowers Transformers to Solve Inherently Serial Problems
Feb 20, 2024



Instructing the model to generate a sequence of intermediate steps, a.k.a., a chain of thought (CoT), is a highly effective method to improve the accuracy of large language models (LLMs) on arithmetics and symbolic reasoning tasks. However, the mechanism behind CoT remains unclear. This work provides a theoretical understanding of the power of CoT for decoder-only transformers through the lens of expressiveness. Conceptually, CoT empowers the model with the ability to perform inherently serial computation, which is otherwise lacking in transformers, especially when depth is low. Given input length $n$, previous works have shown that constant-depth transformers with finite precision $\mathsf{poly}(n)$ embedding size can only solve problems in $\mathsf{TC}^0$ without CoT. We first show an even tighter expressiveness upper bound for constant-depth transformers with constant-bit precision, which can only solve problems in $\mathsf{AC}^0$, a proper subset of $ \mathsf{TC}^0$. However, with $T$ steps of CoT, constant-depth transformers using constant-bit precision and $O(\log n)$ embedding size can solve any problem solvable by boolean circuits of size $T$. Empirically, enabling CoT dramatically improves the accuracy for tasks that are hard for parallel computation, including the composition of permutation groups, iterated squaring, and circuit value problems, especially for low-depth transformers.