 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking the Value of Multi-Agent Workflow: A Strong Single Agent Baseline
Jan 18, 2026Recent advances in LLM-based multi-agent systems (MAS) show that workflows composed of multiple LLM agents with distinct roles, tools, and communication patterns can outperform single-LLM baselines on complex tasks. However, most frameworks are homogeneous, where all agents share the same base LLM and differ only in prompts, tools, and positions in the workflow. This raises the question of whether such workflows can be simulated by a single agent through multi-turn conversations. We investigate this across seven benchmarks spanning coding, mathematics, general question answering, domain-specific reasoning, and real-world planning and tool use. Our results show that a single agent can reach the performance of homogeneous workflows with an efficiency advantage from KV cache reuse, and can even match the performance of an automatically optimized heterogeneous workflow. Building on this finding, we propose \textbf{OneFlow}, an algorithm that automatically tailors workflows for single-agent execution, reducing inference costs compared to existing automatic multi-agent design frameworks without trading off accuracy. These results position the single-LLM implementation of multi-agent workflows as a strong baseline for MAS research. We also note that single-LLM methods cannot capture heterogeneous workflows due to the lack of KV cache sharing across different LLMs, highlighting future opportunities in developing \textit{truly} heterogeneous multi-agent systems.
SAS: Simulated Attention Score
Jul 10, 2025The attention mechanism is a core component of the Transformer architecture. Various methods have been developed to compute attention scores, including multi-head attention (MHA), multi-query attention, group-query attention and so on. We further analyze the MHA and observe that its performance improves as the number of attention heads increases, provided the hidden size per head remains sufficiently large. Therefore, increasing both the head count and hidden size per head with minimal parameter overhead can lead to significant performance gains at a low cost. Motivated by this insight, we introduce Simulated Attention Score (SAS), which maintains a compact model size while simulating a larger number of attention heads and hidden feature dimension per head. This is achieved by projecting a low-dimensional head representation into a higher-dimensional space, effectively increasing attention capacity without increasing parameter count. Beyond the head representations, we further extend the simulation approach to feature dimension of the key and query embeddings, enhancing expressiveness by mimicking the behavior of a larger model while preserving the original model size. To control the parameter cost, we also propose Parameter-Efficient Attention Aggregation (PEAA). Comprehensive experiments on a variety of datasets and tasks demonstrate the effectiveness of the proposed SAS method, achieving significant improvements over different attention variants.
Graph-KV: Breaking Sequence via Injecting Structural Biases into Large Language Models
Jun 09, 2025Modern large language models (LLMs) are inherently auto-regressive, requiring input to be serialized into flat sequences regardless of their structural dependencies. This serialization hinders the model's ability to leverage structural inductive biases, especially in tasks such as retrieval-augmented generation (RAG) and reasoning on data with native graph structures, where inter-segment dependencies are crucial. We introduce Graph-KV with the potential to overcome this limitation. Graph-KV leverages the KV-cache of text segments as condensed representations and governs their interaction through structural inductive biases. In this framework, 'target' segments selectively attend only to the KV-caches of their designated 'source' segments, rather than all preceding segments in a serialized sequence. This approach induces a graph-structured block mask, sparsifying attention and enabling a message-passing-like step within the LLM. Furthermore, strategically allocated positional encodings for source and target segments reduce positional bias and context window consumption. We evaluate Graph-KV across three scenarios: (1) seven RAG benchmarks spanning direct inference, multi-hop reasoning, and long-document understanding; (2) Arxiv-QA, a novel academic paper QA task with full-text scientific papers structured as citation ego-graphs; and (3) paper topic classification within a citation network. By effectively reducing positional bias and harnessing structural inductive biases, Graph-KV substantially outperforms baselines, including standard costly sequential encoding, across various settings. Code and the Graph-KV data are publicly available.
CryoFastAR: Fast Cryo-EM Ab Initio Reconstruction Made Easy
Jun 06, 2025Pose estimation from unordered images is fundamental for 3D reconstruction, robotics, and scientific imaging. Recent geometric foundation models, such as DUSt3R, enable end-to-end dense 3D reconstruction but remain underexplored in scientific imaging fields like cryo-electron microscopy (cryo-EM) for near-atomic protein reconstruction. In cryo-EM, pose estimation and 3D reconstruction from unordered particle images still depend on time-consuming iterative optimization, primarily due to challenges such as low signal-to-noise ratios (SNR) and distortions from the contrast transfer function (CTF). We introduce CryoFastAR, the first geometric foundation model that can directly predict poses from Cryo-EM noisy images for Fast ab initio Reconstruction. By integrating multi-view features and training on large-scale simulated cryo-EM data with realistic noise and CTF modulations, CryoFastAR enhances pose estimation accuracy and generalization. To enhance training stability, we propose a progressive training strategy that first allows the model to extract essential features under simpler conditions before gradually increasing difficulty to improve robustness. Experiments show that CryoFastAR achieves comparable quality while significantly accelerating inference over traditional iterative approaches on both synthetic and real datasets.
FlexGS: Train Once, Deploy Everywhere with Many-in-One Flexible 3D Gaussian Splatting
Jun 04, 20253D Gaussian splatting (3DGS) has enabled various applications in 3D scene representation and novel view synthesis due to its efficient rendering capabilities. However, 3DGS demands relatively significant GPU memory, limiting its use on devices with restricted computational resources. Previous approaches have focused on pruning less important Gaussians, effectively compressing 3DGS but often requiring a fine-tuning stage and lacking adaptability for the specific memory needs of different devices. In this work, we present an elastic inference method for 3DGS. Given an input for the desired model size, our method selects and transforms a subset of Gaussians, achieving substantial rendering performance without additional fine-tuning. We introduce a tiny learnable module that controls Gaussian selection based on the input percentage, along with a transformation module that adjusts the selected Gaussians to complement the performance of the reduced model. Comprehensive experiments on ZipNeRF, MipNeRF and Tanks\&Temples scenes demonstrate the effectiveness of our approach. Code is available at https://flexgs.github.io.
DD-Ranking: Rethinking the Evaluation of Dataset Distillation
May 19, 2025
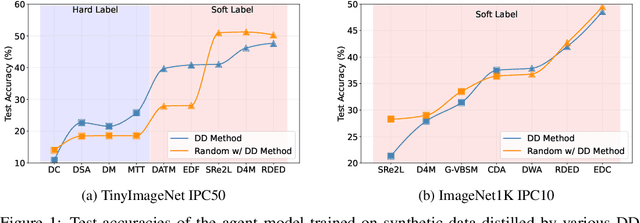
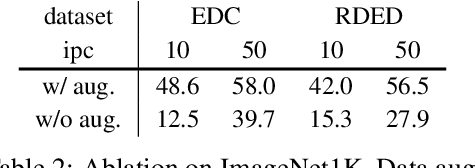
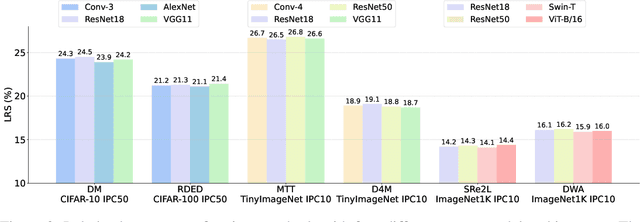
In recent years, dataset distillation has provided a reliable solution for data compression, where models trained on the resulting smaller synthetic datasets achieve performance comparable to those trained on the original datasets. To further improve the performance of synthetic datasets, various training pipelines and optimization objectives have been proposed, greatly advancing the field of dataset distillation. Recent decoupled dataset distillation methods introduce soft labels and stronger data augmentation during the post-evaluation phase and scale dataset distillation up to larger datasets (e.g., ImageNet-1K). However, this raises a question: Is accuracy still a reliable metric to fairly evaluate dataset distillation methods? Our empirical findings suggest that the performance improvements of these methods often stem from additional techniques rather than the inherent quality of the images themselves, with even randomly sampled images achieving superior results. Such misaligned evaluation settings severely hinder the development of DD. Therefore, we propose DD-Ranking, a unified evaluation framework, along with new general evaluation metrics to uncover the true performance improvements achieved by different methods. By refocusing on the actual information enhancement of distilled datasets, DD-Ranking provides a more comprehensive and fair evaluation standard for future research advancements.
Steepest Descent Density Control for Compact 3D Gaussian Splatting
May 08, 20253D Gaussian Splatting (3DGS) has emerged as a powerful technique for real-time, high-resolution novel view synthesis. By representing scenes as a mixture of Gaussian primitives, 3DGS leverages GPU rasterization pipelines for efficient rendering and reconstruction. To optimize scene coverage and capture fine details, 3DGS employs a densification algorithm to generate additional points. However, this process often leads to redundant point clouds, resulting in excessive memory usage, slower performance, and substantial storage demands - posing significant challenges for deployment on resource-constrained devices. To address this limitation, we propose a theoretical framework that demystifies and improves density control in 3DGS. Our analysis reveals that splitting is crucial for escaping saddle points. Through an optimization-theoretic approach, we establish the necessary conditions for densification, determine the minimal number of offspring Gaussians, identify the optimal parameter update direction, and provide an analytical solution for normalizing off-spring opacity. Building on these insights, we introduce SteepGS, incorporating steepest density control, a principled strategy that minimizes loss while maintaining a compact point cloud. SteepGS achieves a ~50% reduction in Gaussian points without compromising rendering quality, significantly enhancing both efficiency and scalability.
Can Test-Time Scaling Improve World Foundation Model?
Mar 31, 2025World foundation models, which simulate the physical world by predicting future states from current observations and inputs, have become central to many applications in physical intelligence, including autonomous driving and robotics. However, these models require substantial computational resources for pretraining and are further constrained by available data during post-training. As such, scaling computation at test time emerges as both a critical and practical alternative to traditional model enlargement or re-training. In this work, we introduce SWIFT, a test-time scaling framework tailored for WFMs. SWIFT integrates our extensible WFM evaluation toolkit with process-level inference strategies, including fast tokenization, probability-based Top-K pruning, and efficient beam search. Empirical results on the COSMOS model demonstrate that test-time scaling exists even in a compute-optimal way. Our findings reveal that test-time scaling laws hold for WFMs and that SWIFT provides a scalable and effective pathway for improving WFM inference without retraining or increasing model size. The code is available at https://github.com/Mia-Cong/SWIFT.git.
Rethinking Addressing in Language Models via Contexualized Equivariant Positional Encoding
Jan 01, 2025



Transformers rely on both content-based and position-based addressing mechanisms to make predictions, but existing positional encoding techniques often diminish the effectiveness of position-based addressing. Many current methods enforce rigid patterns in attention maps, limiting the ability to model long-range dependencies and adapt to diverse tasks. Additionally, most positional encodings are learned as general biases, lacking the specialization required for different instances within a dataset. To address this, we propose con$\textbf{T}$extualized equivari$\textbf{A}$nt $\textbf{P}$osition $\textbf{E}$mbedding ($\textbf{TAPE}$), a novel framework that enhances positional embeddings by incorporating sequence content across layers. TAPE introduces dynamic, context-aware positional encodings, overcoming the constraints of traditional fixed patterns. By enforcing permutation and orthogonal equivariance, TAPE ensures the stability of positional encodings during updates, improving robustness and adaptability. Our method can be easily integrated into pre-trained transformers, offering parameter-efficient fine-tuning with minimal overhead. Extensive experiments shows that TAPE achieves superior performance in language modeling, arithmetic reasoning, and long-context retrieval tasks compared to existing positional embedding techniques.
Understanding and Mitigating Bottlenecks of State Space Models through the Lens of Recency and Over-smoothing
Dec 31, 2024



Structured State Space Models (SSMs) have emerged as alternatives to transformers. While SSMs are often regarded as effective in capturing long-sequence dependencies, we rigorously demonstrate that they are inherently limited by strong recency bias. Our empirical studies also reveal that this bias impairs the models' ability to recall distant information and introduces robustness issues. Our scaling experiments then discovered that deeper structures in SSMs can facilitate the learning of long contexts. However, subsequent theoretical analysis reveals that as SSMs increase in depth, they exhibit another inevitable tendency toward over-smoothing, e.g., token representations becoming increasingly indistinguishable. This fundamental dilemma between recency and over-smoothing hinders the scalability of existing SSMs. Inspired by our theoretical findings, we propose to polarize two channels of the state transition matrices in SSMs, setting them to zero and one, respectively, simultaneously addressing recency bias and over-smoothing. Experiments demonstrate that our polarization technique consistently enhances the associative recall accuracy of long-range tokens and unlocks SSMs to benefit further from deeper architectures. All source codes are released at https://github.com/VITA-Group/SSM-Bottleneck.