 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Jumpy Models for Planning and Fast Learning in Robotic Domains
Feb 24, 2023



In this paper we study the problem of learning multi-step dynamics prediction models (jumpy models) from unlabeled experience and their utility for fast inference of (high-level) plans in downstream tasks. In particular we propose to learn a jumpy model alongside a skill embedding space offline, from previously collected experience for which no labels or reward annotations are required. We then investigate several options of harnessing those learned components in combination with model-based planning or model-free reinforcement learning (RL) to speed up learning on downstream tasks. We conduct a set of experiments in the RGB-stacking environment, showing that planning with the learned skills and the associated model can enable zero-shot generalization to new tasks, and can further speed up training of policies via reinforcement learning. These experiments demonstrate that jumpy models which incorporate temporal abstraction can facilitate planning in long-horizon tasks in which standard dynamics models fail.
SkillS: Adaptive Skill Sequencing for Efficient Temporally-Extended Exploration
Dec 03, 2022



The ability to effectively reuse prior knowledge is a key requirement when building general and flexible Reinforcement Learning (RL) agents. Skill reuse is one of the most common approaches, but current methods have considerable limitations.For example, fine-tuning an existing policy frequently fails, as the policy can degrade rapidly early in training. In a similar vein, distillation of expert behavior can lead to poor results when given sub-optimal experts. We compare several common approaches for skill transfer on multiple domains including changes in task and system dynamics. We identify how existing methods can fail and introduce an alternative approach to mitigate these problems. Our approach learns to sequence existing temporally-extended skills for exploration but learns the final policy directly from the raw experience. This conceptual split enables rapid adaptation and thus efficient data collection but without constraining the final solution.It significantly outperforms many classical methods across a suite of evaluation tasks and we use a broad set of ablations to highlight the importance of differentc omponents of our method.
Solving Continuous Control via Q-learning
Oct 22, 2022While there has been substantial success in applying actor-critic methods to continuous control, simpler critic-only methods such as Q-learning often remain intractable in the associated high-dimensional action spaces. However, most actor-critic methods come at the cost of added complexity: heuristics for stabilization, compute requirements as well as wider hyperparameter search spaces. We show that these issues can be largely alleviated via Q-learning by combining action discretization with value decomposition, framing single-agent control as cooperative multi-agent reinforcement learning (MARL). With bang-bang actions, performance of this critic-only approach matches state-of-the-art continuous actor-critic methods when learning from features or pixels. We extend classical bandit examples from cooperative MARL to provide intuition for how decoupled critics leverage state information to coordinate joint optimization, and demonstrate surprisingly strong performance across a wide variety of continuous control tasks.
MO2: Model-Based Offline Options
Sep 05, 2022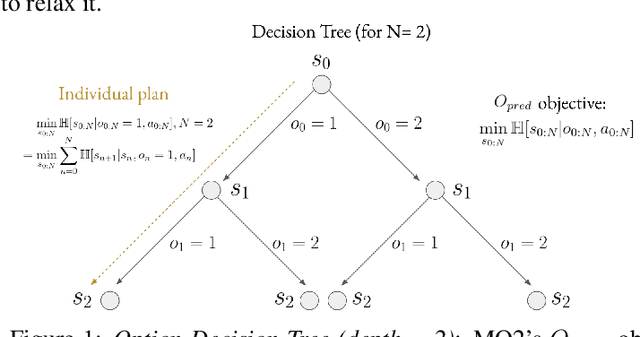

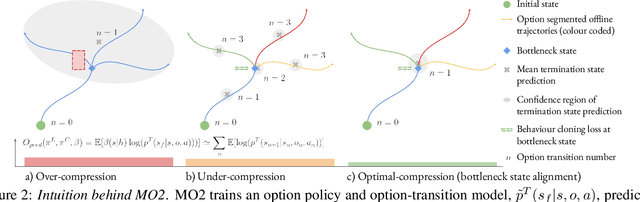
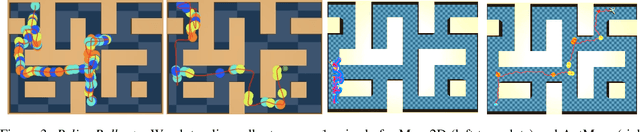
The ability to discover useful behaviours from past experience and transfer them to new tasks is considered a core component of natural embodied intelligence. Inspired by neuroscience, discovering behaviours that switch at bottleneck states have been long sought after for inducing plans of minimum description length across tasks. Prior approaches have either only supported online, on-policy, bottleneck state discovery, limiting sample-efficiency, or discrete state-action domains, restricting applicability. To address this, we introduce Model-Based Offline Options (MO2), an offline hindsight framework supporting sample-efficient bottleneck option discovery over continuous state-action spaces. Once bottleneck options are learnt offline over source domains, they are transferred online to improve exploration and value estimation on the transfer domain. Our experiments show that on complex long-horizon continuous control tasks with sparse, delayed rewards, MO2's properties are essential and lead to performance exceeding recent option learning methods. Additional ablations further demonstrate the impact on option predictability and credit assignment.
Revisiting Gaussian mixture critics in off-policy reinforcement learning: a sample-based approach
Apr 22, 2022
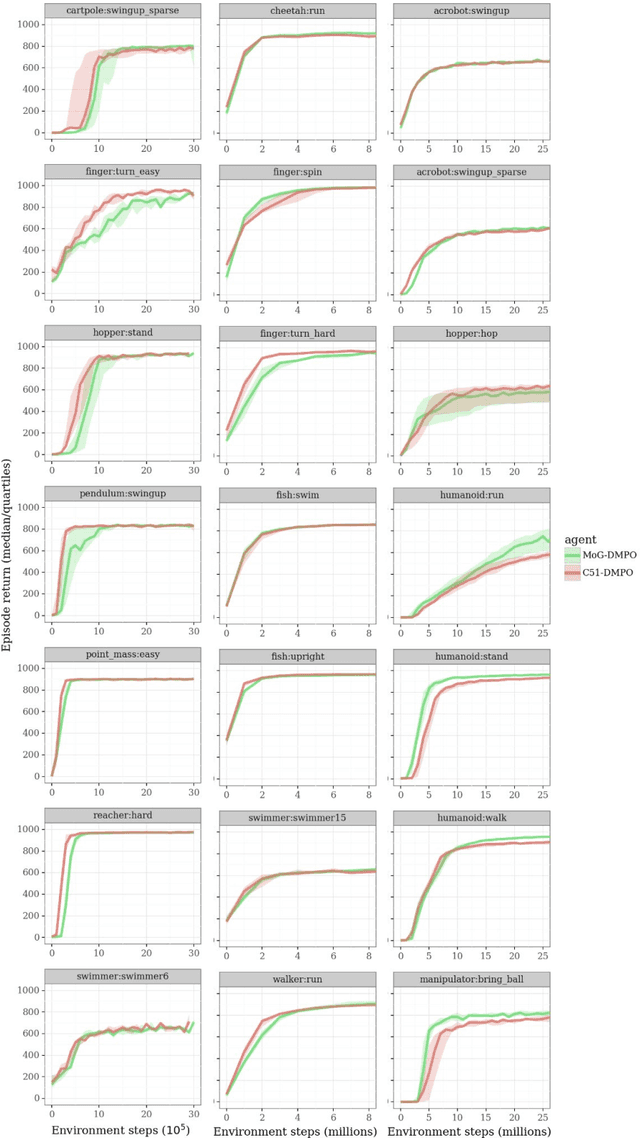
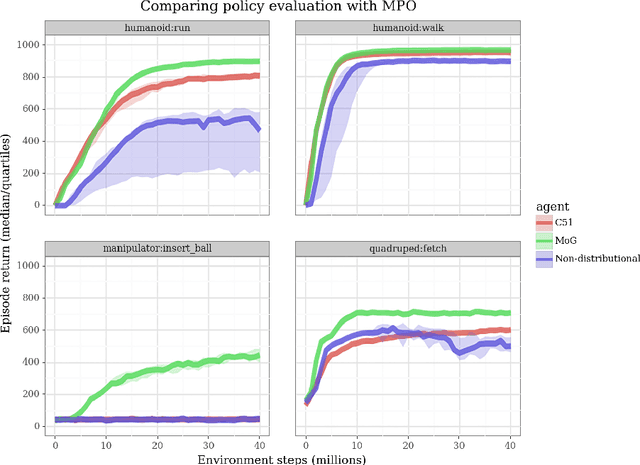
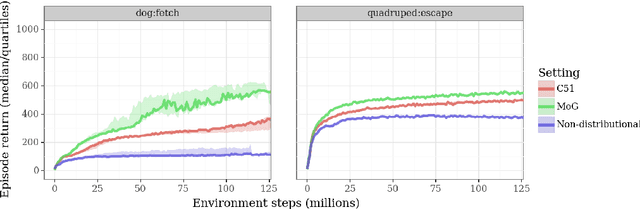
Actor-critic algorithms that make use of distributional policy evaluation have frequently been shown to outperform their non-distributional counterparts on many challenging control tasks. Examples of this behavior include the D4PG and DMPO algorithms as compared to DDPG and MPO, respectively [Barth-Maron et al., 2018; Hoffman et al., 2020]. However, both agents rely on the C51 critic for value estimation.One major drawback of the C51 approach is its requirement of prior knowledge about the minimum andmaximum values a policy can attain as well as the number of bins used, which fixes the resolution ofthe distributional estimate. While the DeepMind control suite of tasks utilizes standardized rewards and episode lengths, thus enabling the entire suite to be solved with a single setting of these hyperparameters, this is often not the case. This paper revisits a natural alternative that removes this requirement, namelya mixture of Gaussians, and a simple sample-based loss function to train it in an off-policy regime. We empirically evaluate its performance on a broad range of continuous control tasks and demonstrate that it eliminates the need for these distributional hyperparameters and achieves state-of-the-art performance on a variety of challenging tasks (e.g. the humanoid, dog, quadruped, and manipulator domains). Finallywe provide an implementation in the Acme agent repository.
The Challenges of Exploration for Offline Reinforcement Learning
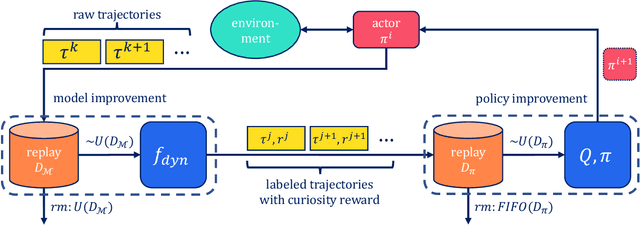
Jan 27, 2022Offline Reinforcement Learning (ORL) enablesus to separately study the two interlinked processes of reinforcement learning: collecting informative experience and inferring optimal behaviour. The second step has been widely studied in the offline setting, but just as critical to data-efficient RL is the collection of informative data. The task-agnostic setting for data collection, where the task is not known a priori, is of particular interest due to the possibility of collecting a single dataset and using it to solve several downstream tasks as they arise. We investigate this setting via curiosity-based intrinsic motivation, a family of exploration methods which encourage the agent to explore those states or transitions it has not yet learned to model. With Explore2Offline, we propose to evaluate the quality of collected data by transferring the collected data and inferring policies with reward relabelling and standard offline RL algorithms. We evaluate a wide variety of data collection strategies, including a new exploration agent, Intrinsic Model Predictive Control (IMPC), using this scheme and demonstrate their performance on various tasks. We use this decoupled framework to strengthen intuitions about exploration and the data prerequisites for effective offline RL.
Is Bang-Bang Control All You Need? Solving Continuous Control with Bernoulli Policies
Nov 03, 2021


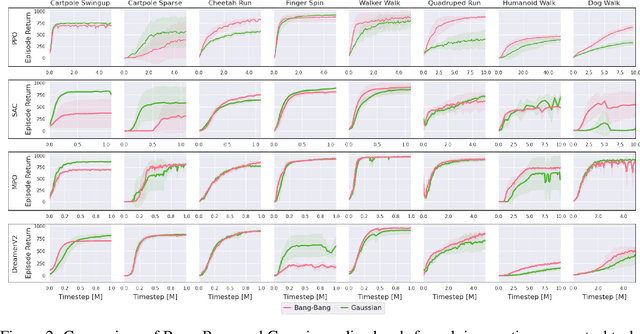
Reinforcement learning (RL) for continuous control typically employs distributions whose support covers the entire action space. In this work, we investigate the colloquially known phenomenon that trained agents often prefer actions at the boundaries of that space. We draw theoretical connections to the emergence of bang-bang behavior in optimal control, and provide extensive empirical evaluation across a variety of recent RL algorithms. We replace the normal Gaussian by a Bernoulli distribution that solely considers the extremes along each action dimension - a bang-bang controller. Surprisingly, this achieves state-of-the-art performance on several continuous control benchmarks - in contrast to robotic hardware, where energy and maintenance cost affect controller choices. Since exploration, learning,and the final solution are entangled in RL, we provide additional imitation learning experiments to reduce the impact of exploration on our analysis. Finally, we show that our observations generalize to environments that aim to model real-world challenges and evaluate factors to mitigate the emergence of bang-bang solutions. Our findings emphasize challenges for benchmarking continuous control algorithms, particularly in light of potential real-world applications.
Beyond Pick-and-Place: Tackling Robotic Stacking of Diverse Shapes
Nov 03, 2021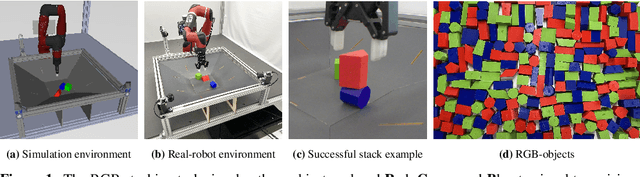
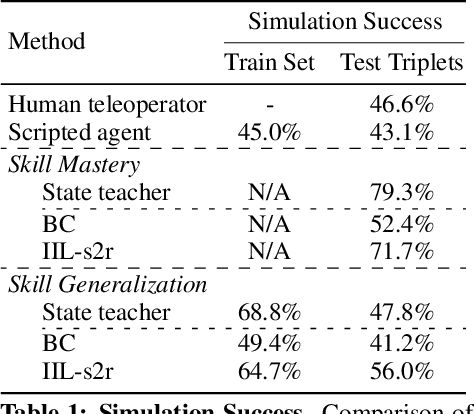
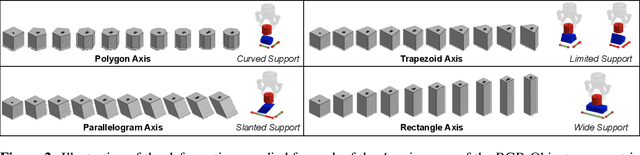
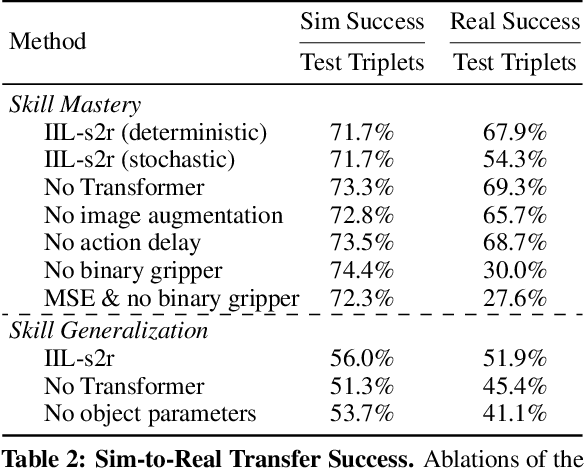
We study the problem of robotic stacking with objects of complex geometry. We propose a challenging and diverse set of such objects that was carefully designed to require strategies beyond a simple "pick-and-place" solution. Our method is a reinforcement learning (RL) approach combined with vision-based interactive policy distillation and simulation-to-reality transfer. Our learned policies can efficiently handle multiple object combinations in the real world and exhibit a large variety of stacking skills. In a large experimental study, we investigate what choices matter for learning such general vision-based agents in simulation, and what affects optimal transfer to the real robot. We then leverage data collected by such policies and improve upon them with offline RL. A video and a blog post of our work are provided as supplementary material.
Evaluating model-based planning and planner amortization for continuous control
Oct 07, 2021
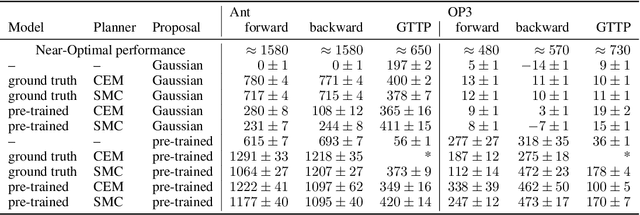
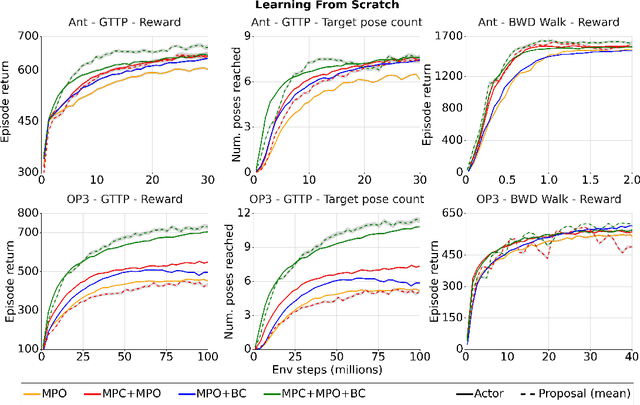
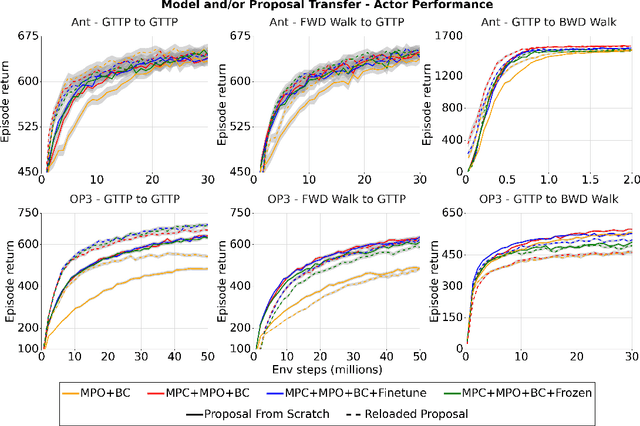
There is a widespread intuition that model-based control methods should be able to surpass the data efficiency of model-free approaches. In this paper we attempt to evaluate this intuition on various challenging locomotion tasks. We take a hybrid approach, combining model predictive control (MPC) with a learned model and model-free policy learning; the learned policy serves as a proposal for MPC. We find that well-tuned model-free agents are strong baselines even for high DoF control problems but MPC with learned proposals and models (trained on the fly or transferred from related tasks) can significantly improve performance and data efficiency in hard multi-task/multi-goal settings. Finally, we show that it is possible to distil a model-based planner into a policy that amortizes the planning computation without any loss of performance. Videos of agents performing different tasks can be seen at https://sites.google.com/view/mbrl-amortization/home.
Is Curiosity All You Need? On the Utility of Emergent Behaviours from Curious Exploration
Sep 17, 2021

Curiosity-based reward schemes can present powerful exploration mechanisms which facilitate the discovery of solutions for complex, sparse or long-horizon tasks. However, as the agent learns to reach previously unexplored spaces and the objective adapts to reward new areas, many behaviours emerge only to disappear due to being overwritten by the constantly shifting objective. We argue that merely using curiosity for fast environment exploration or as a bonus reward for a specific task does not harness the full potential of this technique and misses useful skills. Instead, we propose to shift the focus towards retaining the behaviours which emerge during curiosity-based learning. We posit that these self-discovered behaviours serve as valuable skills in an agent's repertoire to solve related tasks. Our experiments demonstrate the continuous shift in behaviour throughout training and the benefits of a simple policy snapshot method to reuse discovered behaviour for transfer tasks.