 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSplatting Physical Scenes: End-to-End Real-to-Sim from Imperfect Robot Data
Jun 09, 2025Creating accurate, physical simulations directly from real-world robot motion holds great value for safe, scalable, and affordable robot learning, yet remains exceptionally challenging. Real robot data suffers from occlusions, noisy camera poses, dynamic scene elements, which hinder the creation of geometrically accurate and photorealistic digital twins of unseen objects. We introduce a novel real-to-sim framework tackling all these challenges at once. Our key insight is a hybrid scene representation merging the photorealistic rendering of 3D Gaussian Splatting with explicit object meshes suitable for physics simulation within a single representation. We propose an end-to-end optimization pipeline that leverages differentiable rendering and differentiable physics within MuJoCo to jointly refine all scene components - from object geometry and appearance to robot poses and physical parameters - directly from raw and imprecise robot trajectories. This unified optimization allows us to simultaneously achieve high-fidelity object mesh reconstruction, generate photorealistic novel views, and perform annotation-free robot pose calibration. We demonstrate the effectiveness of our approach both in simulation and on challenging real-world sequences using an ALOHA 2 bi-manual manipulator, enabling more practical and robust real-to-simulation pipelines.
Gemini Robotics: Bringing AI into the Physical World
Mar 25, 2025Recent advancements in large multimodal models have led to the emergence of remarkable generalist capabilities in digital domains, yet their translation to physical agents such as robots remains a significant challenge. This report introduces a new family of AI models purposefully designed for robotics and built upon the foundation of Gemini 2.0. We present Gemini Robotics, an advanced Vision-Language-Action (VLA) generalist model capable of directly controlling robots. Gemini Robotics executes smooth and reactive movements to tackle a wide range of complex manipulation tasks while also being robust to variations in object types and positions, handling unseen environments as well as following diverse, open vocabulary instructions. We show that with additional fine-tuning, Gemini Robotics can be specialized to new capabilities including solving long-horizon, highly dexterous tasks, learning new short-horizon tasks from as few as 100 demonstrations and adapting to completely novel robot embodiments. This is made possible because Gemini Robotics builds on top of the Gemini Robotics-ER model, the second model we introduce in this work. Gemini Robotics-ER (Embodied Reasoning) extends Gemini's multimodal reasoning capabilities into the physical world, with enhanced spatial and temporal understanding. This enables capabilities relevant to robotics including object detection, pointing, trajectory and grasp prediction, as well as multi-view correspondence and 3D bounding box predictions. We show how this novel combination can support a variety of robotics applications. We also discuss and address important safety considerations related to this new class of robotics foundation models. The Gemini Robotics family marks a substantial step towards developing general-purpose robots that realizes AI's potential in the physical world.
Proc4Gem: Foundation models for physical agency through procedural generation
Mar 11, 2025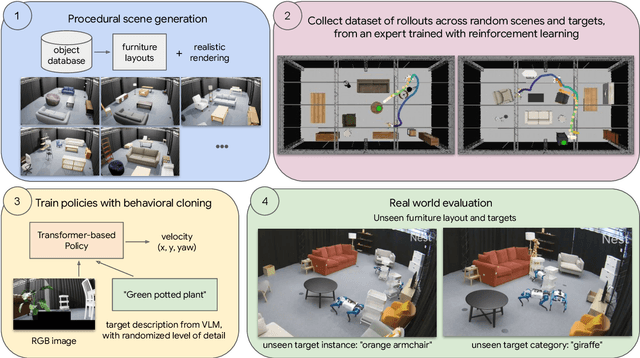
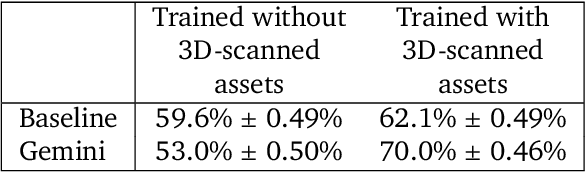

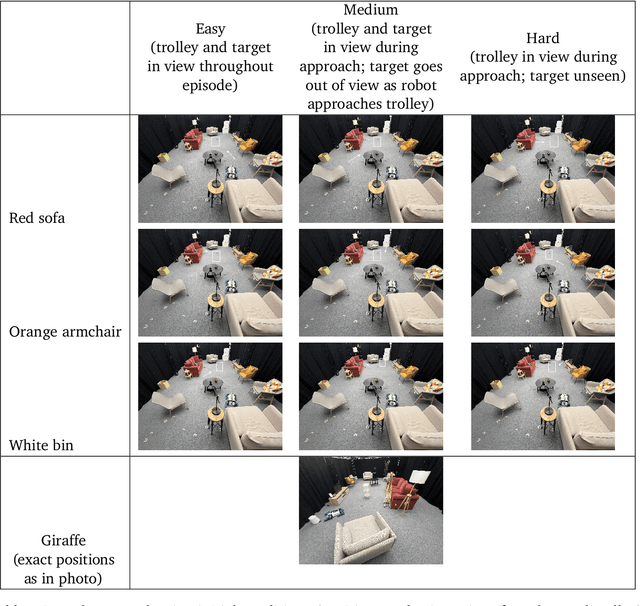
In robot learning, it is common to either ignore the environment semantics, focusing on tasks like whole-body control which only require reasoning about robot-environment contacts, or conversely to ignore contact dynamics, focusing on grounding high-level movement in vision and language. In this work, we show that advances in generative modeling, photorealistic rendering, and procedural generation allow us to tackle tasks requiring both. By generating contact-rich trajectories with accurate physics in semantically-diverse simulations, we can distill behaviors into large multimodal models that directly transfer to the real world: a system we call Proc4Gem. Specifically, we show that a foundation model, Gemini, fine-tuned on only simulation data, can be instructed in language to control a quadruped robot to push an object with its body to unseen targets in unseen real-world environments. Our real-world results demonstrate the promise of using simulation to imbue foundation models with physical agency. Videos can be found at our website: https://sites.google.com/view/proc4gem
Learning the RoPEs: Better 2D and 3D Position Encodings with STRING
Feb 04, 2025
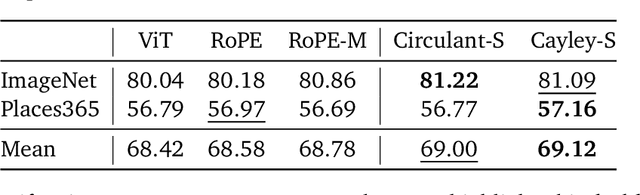
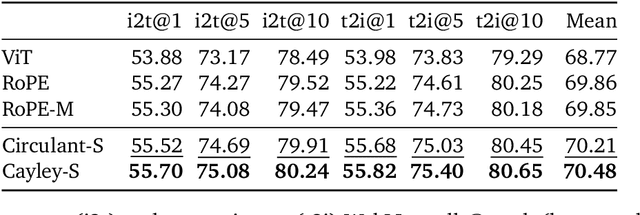
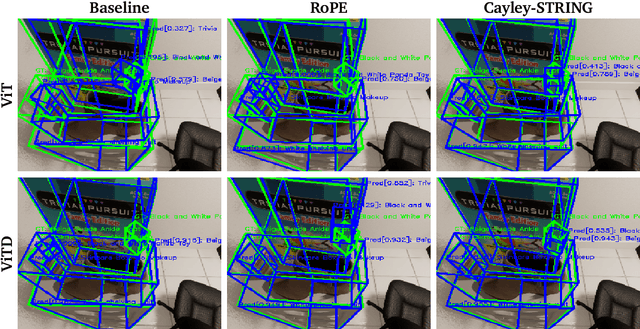
We introduce STRING: Separable Translationally Invariant Position Encodings. STRING extends Rotary Position Encodings, a recently proposed and widely used algorithm in large language models, via a unifying theoretical framework. Importantly, STRING still provides exact translation invariance, including token coordinates of arbitrary dimensionality, whilst maintaining a low computational footprint. These properties are especially important in robotics, where efficient 3D token representation is key. We integrate STRING into Vision Transformers with RGB(-D) inputs (color plus optional depth), showing substantial gains, e.g. in open-vocabulary object detection and for robotics controllers. We complement our experiments with a rigorous mathematical analysis, proving the universality of our methods.
Diffusion Augmented Agents: A Framework for Efficient Exploration and Transfer Learning
Jul 30, 2024



We introduce Diffusion Augmented Agents (DAAG), a novel framework that leverages large language models, vision language models, and diffusion models to improve sample efficiency and transfer learning in reinforcement learning for embodied agents. DAAG hindsight relabels the agent's past experience by using diffusion models to transform videos in a temporally and geometrically consistent way to align with target instructions with a technique we call Hindsight Experience Augmentation. A large language model orchestrates this autonomous process without requiring human supervision, making it well-suited for lifelong learning scenarios. The framework reduces the amount of reward-labeled data needed to 1) finetune a vision language model that acts as a reward detector, and 2) train RL agents on new tasks. We demonstrate the sample efficiency gains of DAAG in simulated robotics environments involving manipulation and navigation. Our results show that DAAG improves learning of reward detectors, transferring past experience, and acquiring new tasks - key abilities for developing efficient lifelong learning agents. Supplementary material and visualizations are available on our website https://sites.google.com/view/diffusion-augmented-agents/
Learning Robot Soccer from Egocentric Vision with Deep Reinforcement Learning
May 03, 2024



We apply multi-agent deep reinforcement learning (RL) to train end-to-end robot soccer policies with fully onboard computation and sensing via egocentric RGB vision. This setting reflects many challenges of real-world robotics, including active perception, agile full-body control, and long-horizon planning in a dynamic, partially-observable, multi-agent domain. We rely on large-scale, simulation-based data generation to obtain complex behaviors from egocentric vision which can be successfully transferred to physical robots using low-cost sensors. To achieve adequate visual realism, our simulation combines rigid-body physics with learned, realistic rendering via multiple Neural Radiance Fields (NeRFs). We combine teacher-based multi-agent RL and cross-experiment data reuse to enable the discovery of sophisticated soccer strategies. We analyze active-perception behaviors including object tracking and ball seeking that emerge when simply optimizing perception-agnostic soccer play. The agents display equivalent levels of performance and agility as policies with access to privileged, ground-truth state. To our knowledge, this paper constitutes a first demonstration of end-to-end training for multi-agent robot soccer, mapping raw pixel observations to joint-level actions, that can be deployed in the real world. Videos of the game-play and analyses can be seen on our website https://sites.google.com/view/vision-soccer .
Real-World Fluid Directed Rigid Body Control via Deep Reinforcement Learning
Feb 08, 2024



Recent advances in real-world applications of reinforcement learning (RL) have relied on the ability to accurately simulate systems at scale. However, domains such as fluid dynamical systems exhibit complex dynamic phenomena that are hard to simulate at high integration rates, limiting the direct application of modern deep RL algorithms to often expensive or safety critical hardware. In this work, we introduce "Box o Flows", a novel benchtop experimental control system for systematically evaluating RL algorithms in dynamic real-world scenarios. We describe the key components of the Box o Flows, and through a series of experiments demonstrate how state-of-the-art model-free RL algorithms can synthesize a variety of complex behaviors via simple reward specifications. Furthermore, we explore the role of offline RL in data-efficient hypothesis testing by reusing past experiences. We believe that the insights gained from this preliminary study and the availability of systems like the Box o Flows support the way forward for developing systematic RL algorithms that can be generally applied to complex, dynamical systems. Supplementary material and videos of experiments are available at https://sites.google.com/view/box-o-flows/home.
Foundations for Transfer in Reinforcement Learning: A Taxonomy of Knowledge Modalities
Dec 04, 2023Contemporary artificial intelligence systems exhibit rapidly growing abilities accompanied by the growth of required resources, expansive datasets and corresponding investments into computing infrastructure. Although earlier successes predominantly focus on constrained settings, recent strides in fundamental research and applications aspire to create increasingly general systems. This evolving landscape presents a dual panorama of opportunities and challenges in refining the generalisation and transfer of knowledge - the extraction from existing sources and adaptation as a comprehensive foundation for tackling new problems. Within the domain of reinforcement learning (RL), the representation of knowledge manifests through various modalities, including dynamics and reward models, value functions, policies, and the original data. This taxonomy systematically targets these modalities and frames its discussion based on their inherent properties and alignment with different objectives and mechanisms for transfer. Where possible, we aim to provide coarse guidance delineating approaches which address requirements such as limiting environment interactions, maximising computational efficiency, and enhancing generalisation across varying axes of change. Finally, we analyse reasons contributing to the prevalence or scarcity of specific forms of transfer, the inherent potential behind pushing these frontiers, and underscore the significance of transitioning from designed to learned transfer.
Equivariant Data Augmentation for Generalization in Offline Reinforcement Learning
Sep 14, 2023We present a novel approach to address the challenge of generalization in offline reinforcement learning (RL), where the agent learns from a fixed dataset without any additional interaction with the environment. Specifically, we aim to improve the agent's ability to generalize to out-of-distribution goals. To achieve this, we propose to learn a dynamics model and check if it is equivariant with respect to a fixed type of transformation, namely translations in the state space. We then use an entropy regularizer to increase the equivariant set and augment the dataset with the resulting transformed samples. Finally, we learn a new policy offline based on the augmented dataset, with an off-the-shelf offline RL algorithm. Our experimental results demonstrate that our approach can greatly improve the test performance of the policy on the considered environments.
Towards A Unified Agent with Foundation Models
Jul 18, 2023



Language Models and Vision Language Models have recently demonstrated unprecedented capabilities in terms of understanding human intentions, reasoning, scene understanding, and planning-like behaviour, in text form, among many others. In this work, we investigate how to embed and leverage such abilities in Reinforcement Learning (RL) agents. We design a framework that uses language as the core reasoning tool, exploring how this enables an agent to tackle a series of fundamental RL challenges, such as efficient exploration, reusing experience data, scheduling skills, and learning from observations, which traditionally require separate, vertically designed algorithms. We test our method on a sparse-reward simulated robotic manipulation environment, where a robot needs to stack a set of objects. We demonstrate substantial performance improvements over baselines in exploration efficiency and ability to reuse data from offline datasets, and illustrate how to reuse learned skills to solve novel tasks or imitate videos of human experts.