 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting Stealth Sycophancy in Mental-Health Dialogue with Dynamic Emotional Signature Graphs
May 05, 2026As conversational AI therapists are increasingly used in psychological support settings, reliable offline evaluation of therapeutic response quality remains an open problem. This paper studies multi-domain support-dialogue evaluation without relying on large language models as final judges. We use a direct LLM judge as a baseline that reads raw dialogue text and predicts whether the target response is harmful, productive, or neutral. We find that direct LLM judges and symmetric text-similarity metrics are poorly aligned with therapeutic quality because the target label depends on clinical direction: whether the response moves the user state toward regulation or reframing, leaves it broadly unchanged, or reinforces deterioration through higher risk affect or cognitive-distortion mass. To address this issue, we propose Dynamic Emotional Signature Graphs (DESG), a model-agnostic evaluator that represents dialogue windows with decoupled clinical states and scores them using asymmetric clinical geometry. We evaluate DESG on a constructed diagnostic stress-test benchmark of 3{,}000 dialogue windows from EmpatheticDialogues, ESConv, and CRADLE-Dialogue, covering peer support, counseling dialogue, and crisis-oriented interaction. On the 600-window held-out test aggregate, DESG-Ensemble achieves 0.9353 macro-F1, exceeding ConcatANN by 1.51 percentage points, BERTScore by 19.63 points, and TRACT by 33.81 points. Feature ablations, artifact controls, a 100-window blinded adjudicator audit, and qualitative disagreement cases indicate that the clinical state manifold is the main discriminative substrate, while graph-based trajectory components provide asymmetric scoring and interpretable diagnostics rather than serving as the sole source of performance.
Visibility-Aware Mobile Grasping in Dynamic Environments
May 04, 2026This paper addresses the problem of mobile grasping in dynamic, unknown environments where a robot must operate under a limited field-of-view. The fundamental challenge is the inherent trade-off between ``seeing'' around to reduce environmental uncertainty and ``moving'' the body to achieve task progress in a high-dimensional configuration space, subject to visibility constraints. Previous approaches often assume known or static environments and decouple these objectives, failing to guarantee safety when unobserved dynamic obstacles intersect the robot's path during manipulation. In this paper, we propose a unified mobile grasping system comprising two core components: (1) an iterative low-level whole-body planner coupled with velocity-aware active perception to navigate dynamic environments safely; and (2) a hierarchical high-level planner based on behavior trees that adaptively generates subgoals to guide the robot through exploration and runtime failures. We provide experimental results across 400 randomized simulation scenarios and real-world deployment on a Fetch mobile manipulator. Results show that our system achieves a success rate of 68.8\% and 58.0\% in unknown static and dynamic environments, respectively, significantly boosting success rates by 22.8\% and 18.0\% over the \nam approach in both unknown static and dynamic environments, with improved collision safety.
Scaling World Model for Hierarchical Manipulation Policies
Feb 12, 2026Vision-Language-Action (VLA) models are promising for generalist robot manipulation but remain brittle in out-of-distribution (OOD) settings, especially with limited real-robot data. To resolve the generalization bottleneck, we introduce a hierarchical Vision-Language-Action framework \our{} that leverages the generalization of large-scale pre-trained world model for robust and generalizable VIsual Subgoal TAsk decomposition VISTA. Our hierarchical framework \our{} consists of a world model as the high-level planner and a VLA as the low-level executor. The high-level world model first divides manipulation tasks into subtask sequences with goal images, and the low-level policy follows the textual and visual guidance to generate action sequences. Compared to raw textual goal specification, these synthesized goal images provide visually and physically grounded details for low-level policies, making it feasible to generalize across unseen objects and novel scenarios. We validate both visual goal synthesis and our hierarchical VLA policies in massive out-of-distribution scenarios, and the performance of the same-structured VLA in novel scenarios could boost from 14% to 69% with the guidance generated by the world model. Results demonstrate that our method outperforms previous baselines with a clear margin, particularly in out-of-distribution scenarios. Project page: \href{https://vista-wm.github.io/}{https://vista-wm.github.io}
Chain-of-Action: Trajectory Autoregressive Modeling for Robotic Manipulation
Jun 11, 2025We present Chain-of-Action (CoA), a novel visuo-motor policy paradigm built upon Trajectory Autoregressive Modeling. Unlike conventional approaches that predict next step action(s) forward, CoA generates an entire trajectory by explicit backward reasoning with task-specific goals through an action-level Chain-of-Thought (CoT) process. This process is unified within a single autoregressive structure: (1) the first token corresponds to a stable keyframe action that encodes the task-specific goals; and (2) subsequent action tokens are generated autoregressively, conditioned on the initial keyframe and previously predicted actions. This backward action reasoning enforces a global-to-local structure, allowing each local action to be tightly constrained by the final goal. To further realize the action reasoning structure, CoA incorporates four complementary designs: continuous action token representation; dynamic stopping for variable-length trajectory generation; reverse temporal ensemble; and multi-token prediction to balance action chunk modeling with global structure. As a result, CoA gives strong spatial generalization capabilities while preserving the flexibility and simplicity of a visuo-motor policy. Empirically, we observe CoA achieves the state-of-the-art performance across 60 RLBench tasks and 8 real-world manipulation tasks.
Robot Operation of Home Appliances by Reading User Manuals
May 26, 2025



Operating home appliances, among the most common tools in every household, is a critical capability for assistive home robots. This paper presents ApBot, a robot system that operates novel household appliances by "reading" their user manuals. ApBot faces multiple challenges: (i) infer goal-conditioned partial policies from their unstructured, textual descriptions in a user manual document, (ii) ground the policies to the appliance in the physical world, and (iii) execute the policies reliably over potentially many steps, despite compounding errors. To tackle these challenges, ApBot constructs a structured, symbolic model of an appliance from its manual, with the help of a large vision-language model (VLM). It grounds the symbolic actions visually to control panel elements. Finally, ApBot closes the loop by updating the model based on visual feedback. Our experiments show that across a wide range of simulated and real-world appliances, ApBot achieves consistent and statistically significant improvements in task success rate, compared with state-of-the-art large VLMs used directly as control policies. These results suggest that a structured internal representations plays an important role in robust robot operation of home appliances, especially, complex ones.
RTV-Bench: Benchmarking MLLM Continuous Perception, Understanding and Reasoning through Real-Time Video
May 04, 2025Multimodal Large Language Models (MLLMs) increasingly excel at perception, understanding, and reasoning. However, current benchmarks inadequately evaluate their ability to perform these tasks continuously in dynamic, real-world environments. To bridge this gap, we introduce RTV-Bench, a fine-grained benchmark for MLLM real-time video analysis. RTV-Bench uses three key principles: (1) Multi-Timestamp Question Answering (MTQA), where answers evolve with scene changes; (2) Hierarchical Question Structure, combining basic and advanced queries; and (3) Multi-dimensional Evaluation, assessing the ability of continuous perception, understanding, and reasoning. RTV-Bench contains 552 diverse videos (167.2 hours) and 4,631 high-quality QA pairs. We evaluated leading MLLMs, including proprietary (GPT-4o, Gemini 2.0), open-source offline (Qwen2.5-VL, VideoLLaMA3), and open-source real-time (VITA-1.5, InternLM-XComposer2.5-OmniLive) models. Experiment results show open-source real-time models largely outperform offline ones but still trail top proprietary models. Our analysis also reveals that larger model size or higher frame sampling rates do not significantly boost RTV-Bench performance, sometimes causing slight decreases. This underscores the need for better model architectures optimized for video stream processing and long sequences to advance real-time video analysis with MLLMs. Our benchmark toolkit is available at: https://github.com/LJungang/RTV-Bench.
MInCo: Mitigating Information Conflicts in Distracted Visual Model-based Reinforcement Learning
Apr 05, 2025


Existing visual model-based reinforcement learning (MBRL) algorithms with observation reconstruction often suffer from information conflicts, making it difficult to learn compact representations and hence result in less robust policies, especially in the presence of task-irrelevant visual distractions. In this paper, we first reveal that the information conflicts in current visual MBRL algorithms stem from visual representation learning and latent dynamics modeling with an information-theoretic perspective. Based on this finding, we present a new algorithm to resolve information conflicts for visual MBRL, named MInCo, which mitigates information conflicts by leveraging negative-free contrastive learning, aiding in learning invariant representation and robust policies despite noisy observations. To prevent the dominance of visual representation learning, we introduce time-varying reweighting to bias the learning towards dynamics modeling as training proceeds. We evaluate our method on several robotic control tasks with dynamic background distractions. Our experiments demonstrate that MInCo learns invariant representations against background noise and consistently outperforms current state-of-the-art visual MBRL methods. Code is available at https://github.com/ShiguangSun/minco.
FUNCTO: Function-Centric One-Shot Imitation Learning for Tool Manipulation
Feb 17, 2025



Learning tool use from a single human demonstration video offers a highly intuitive and efficient approach to robot teaching. While humans can effortlessly generalize a demonstrated tool manipulation skill to diverse tools that support the same function (e.g., pouring with a mug versus a teapot), current one-shot imitation learning (OSIL) methods struggle to achieve this. A key challenge lies in establishing functional correspondences between demonstration and test tools, considering significant geometric variations among tools with the same function (i.e., intra-function variations). To address this challenge, we propose FUNCTO (Function-Centric OSIL for Tool Manipulation), an OSIL method that establishes function-centric correspondences with a 3D functional keypoint representation, enabling robots to generalize tool manipulation skills from a single human demonstration video to novel tools with the same function despite significant intra-function variations. With this formulation, we factorize FUNCTO into three stages: (1) functional keypoint extraction, (2) function-centric correspondence establishment, and (3) functional keypoint-based action planning. We evaluate FUNCTO against exiting modular OSIL methods and end-to-end behavioral cloning methods through real-robot experiments on diverse tool manipulation tasks. The results demonstrate the superiority of FUNCTO when generalizing to novel tools with intra-function geometric variations. More details are available at https://sites.google.com/view/functo.
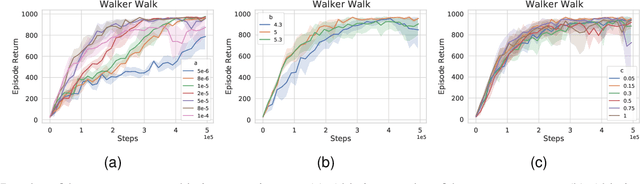
Towards Generalist Robot Policies: What Matters in Building Vision-Language-Action Models
Dec 18, 2024
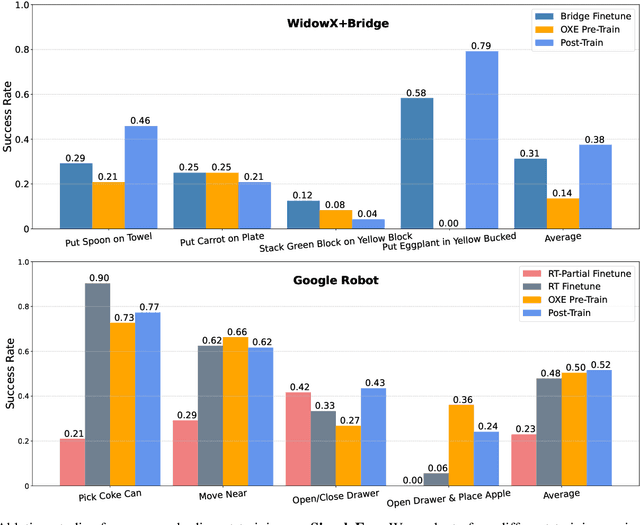

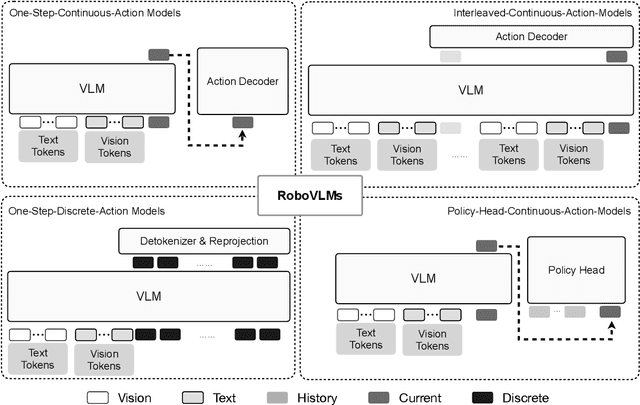
Foundation Vision Language Models (VLMs) exhibit strong capabilities in multi-modal representation learning, comprehension, and reasoning. By injecting action components into the VLMs, Vision-Language-Action Models (VLAs) can be naturally formed and also show promising performance. Existing work has demonstrated the effectiveness and generalization of VLAs in multiple scenarios and tasks. Nevertheless, the transfer from VLMs to VLAs is not trivial since existing VLAs differ in their backbones, action-prediction formulations, data distributions, and training recipes. This leads to a missing piece for a systematic understanding of the design choices of VLAs. In this work, we disclose the key factors that significantly influence the performance of VLA and focus on answering three essential design choices: which backbone to select, how to formulate the VLA architectures, and when to add cross-embodiment data. The obtained results convince us firmly to explain why we need VLA and develop a new family of VLAs, RoboVLMs, which require very few manual designs and achieve a new state-of-the-art performance in three simulation tasks and real-world experiments. Through our extensive experiments, which include over 8 VLM backbones, 4 policy architectures, and over 600 distinct designed experiments, we provide a detailed guidebook for the future design of VLAs. In addition to the study, the highly flexible RoboVLMs framework, which supports easy integrations of new VLMs and free combinations of various design choices, is made public to facilitate future research. We open-source all details, including codes, models, datasets, and toolkits, along with detailed training and evaluation recipes at: robovlms.github.io.
REGNet V2: End-to-End REgion-based Grasp Detection Network for Grippers of Different Sizes in Point Clouds
Oct 12, 2024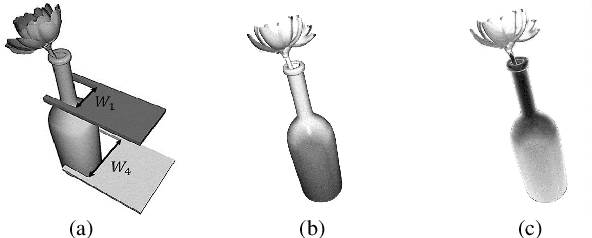
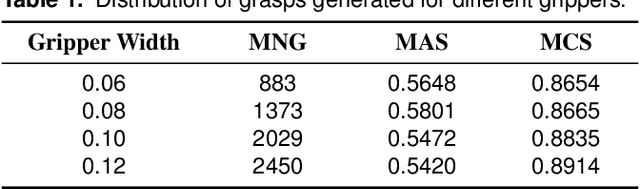
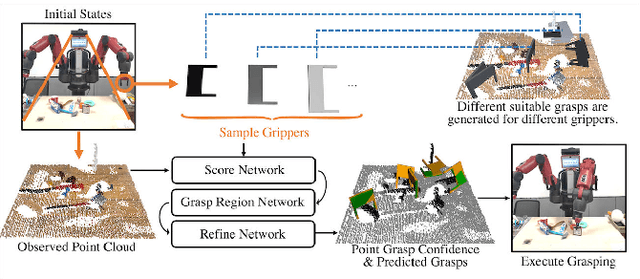
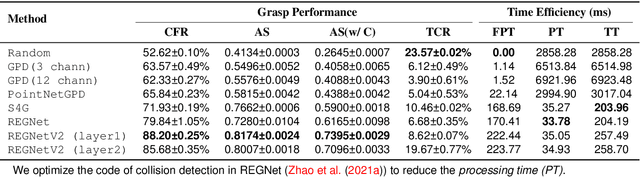
Grasping has been a crucial but challenging problem in robotics for many years. One of the most important challenges is how to make grasping generalizable and robust to novel objects as well as grippers in unstructured environments. We present \regnet, a robotic grasping system that can adapt to different parallel jaws to grasp diversified objects. To support different grippers, \regnet embeds the gripper parameters into point clouds, based on which it predicts suitable grasp configurations. It includes three components: Score Network (SN), Grasp Region Network (GRN), and Refine Network (RN). In the first stage, SN is used to filter suitable points for grasping by grasp confidence scores. In the second stage, based on the selected points, GRN generates a set of grasp proposals. Finally, RN refines the grasp proposals for more accurate and robust predictions. We devise an analytic policy to choose the optimal grasp to be executed from the predicted grasp set. To train \regnet, we construct a large-scale grasp dataset containing collision-free grasp configurations using different parallel-jaw grippers. The experimental results demonstrate that \regnet with the analytic policy achieves the highest success rate of $74.98\%$ in real-world clutter scenes with $20$ objects, significantly outperforming several state-of-the-art methods, including GPD, PointNetGPD, and S4G. The code and dataset are available at https://github.com/zhaobinglei/REGNet-V2.