 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Towards Scalable Hyperbolic Neural Networks using Taylor Series Approximations
Jun 07, 2022
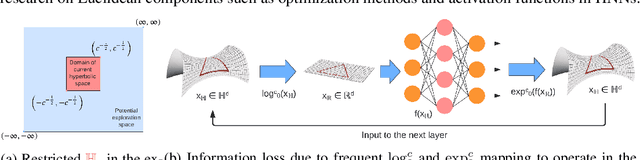
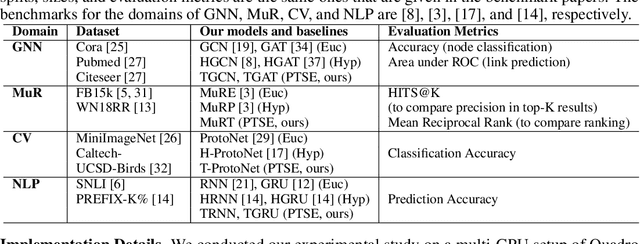
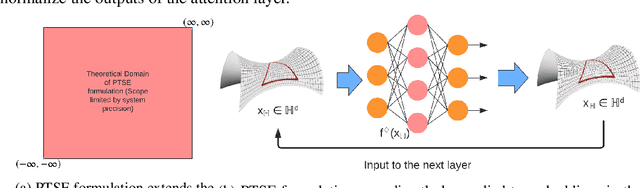
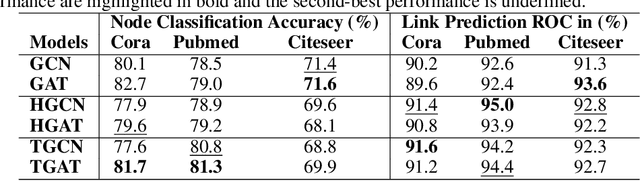
Hyperbolic networks have shown prominent improvements over their Euclidean counterparts in several areas involving hierarchical datasets in various domains such as computer vision, graph analysis, and natural language processing. However, their adoption in practice remains restricted due to (i) non-scalability on accelerated deep learning hardware, (ii) vanishing gradients due to the closure of hyperbolic space, and (iii) information loss due to frequent mapping between local tangent space and fully hyperbolic space. To tackle these issues, we propose the approximation of hyperbolic operators using Taylor series expansions, which allows us to reformulate the computationally expensive tangent and cosine hyperbolic functions into their polynomial equivariants which are more efficient. This allows us to retain the benefits of preserving the hierarchical anatomy of the hyperbolic space, while maintaining the scalability over current accelerated deep learning infrastructure. The polynomial formulation also enables us to utilize the advancements in Euclidean networks such as gradient clipping and ReLU activation to avoid vanishing gradients and remove errors due to frequent switching between tangent space and hyperbolic space. Our empirical evaluation on standard benchmarks in the domain of graph analysis and computer vision shows that our polynomial formulation is as scalable as Euclidean architectures, both in terms of memory and time complexity, while providing results as effective as hyperbolic models. Moreover, our formulation also shows a considerable improvement over its baselines due to our solution to vanishing gradients and information loss.
LinK3D: Linear Keypoints Representation for 3D LiDAR Point Cloud
Jun 13, 2022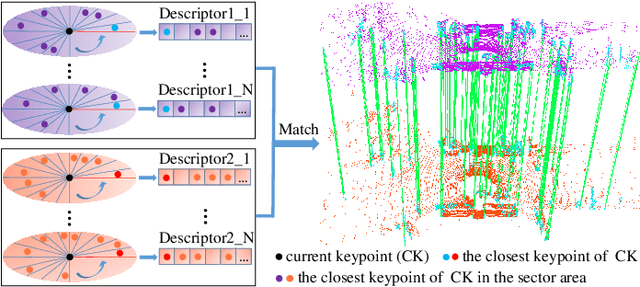
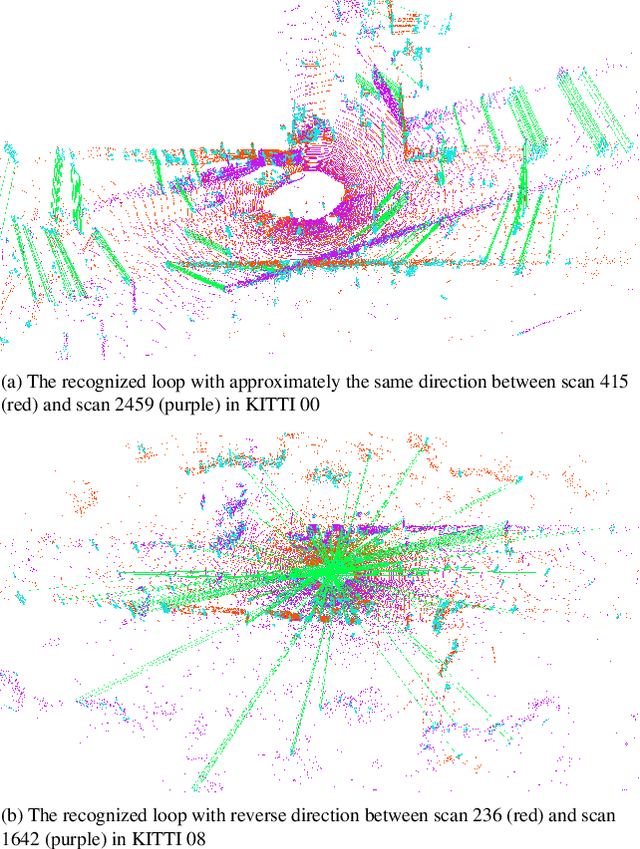
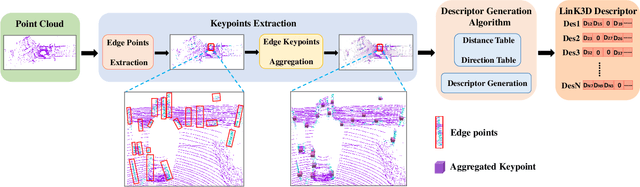
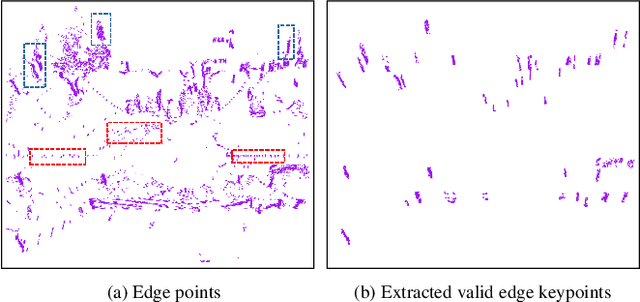
Feature extraction and matching are the basic parts of many computer vision tasks, such as 2D or 3D object detection, recognition, and registration. As we all know, 2D feature extraction and matching have already been achieved great success. Unfortunately, in the field of 3D, the current methods fail to support the extensive application of 3D LiDAR sensors in vision tasks, due to the poor descriptiveness and inefficiency. To address this limitation, we propose a novel 3D feature representation method: Linear Keypoints representation for 3D LiDAR point cloud, called LinK3D. The novelty of LinK3D lies in that it fully considers the characteristics (such as sparsity, complexity of scenarios) of LiDAR point cloud, and represents current keypoint with its robust neighbor keypoints, which provide strong constraint on the description of current keypoint. The proposed LinK3D has been evaluated on two public datasets (i.e., KITTI, Steven VLP16), and the experimental results show that our method greatly outperforms the state-of-the-arts in matching performance. More importantly, LinK3D shows excellent real-time performance (based on the frequence 10 Hz of LiDAR). LinK3D only takes an average of 32 milliseconds to extract features from the point cloud collected by a 64-ray laser beam, and takes merely about 8 milliseconds to match two LiDAR scans when executed in a notebook with an Intel Core i7 @2.2 GHz processor. Moreover, our method can be widely extended to a variety of 3D vision applications. In this paper, we has applied our LinK3D to 3D registration, LiDAR odometry and place recognition tasks, and achieved competitive results compared with the state-of-the-art methods.
Teacher Perception of Automatically Extracted Grammar Concepts for L2 Language Learning
Jun 10, 2022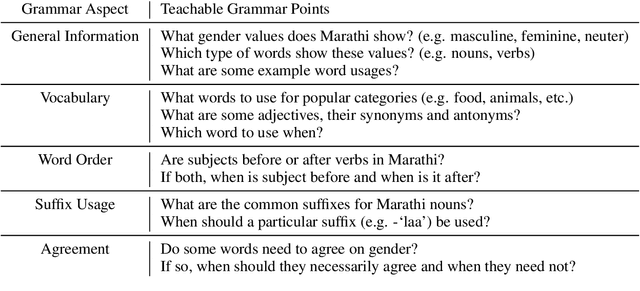
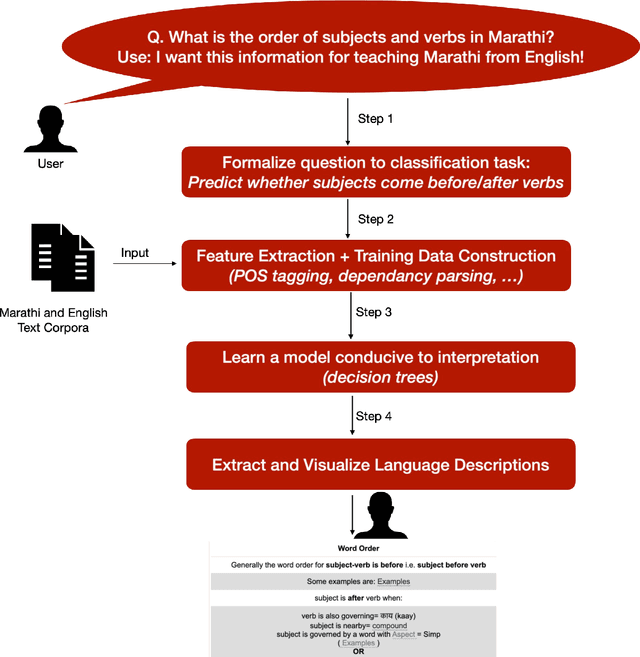
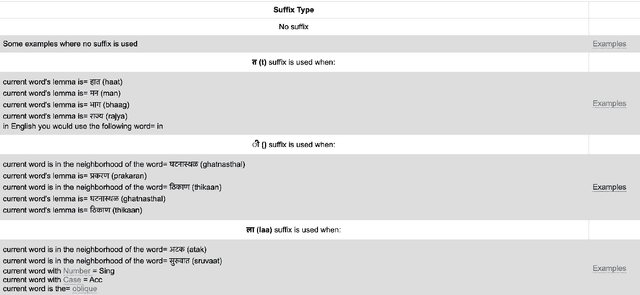
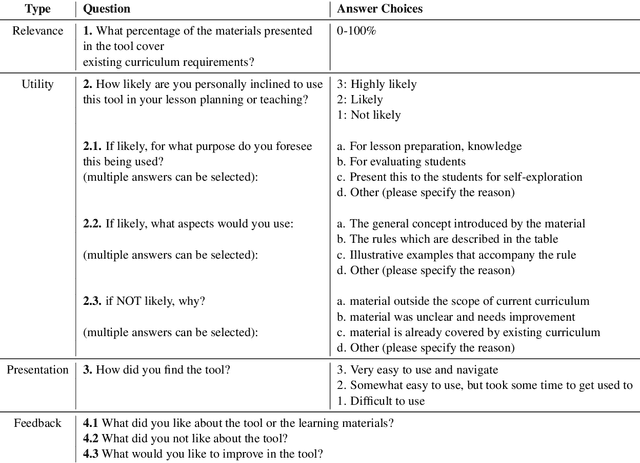
One of the challenges of language teaching is how to organize the rules regarding syntax, semantics, or phonology of the language in a meaningful manner. This not only requires pedagogical skills, but also requires a deep understanding of that language. While comprehensive materials to develop such curricula are available in English and some broadly spoken languages, for many other languages, teachers need to manually create them in response to their students' needs. This process is challenging because i) it requires that such experts be accessible and have the necessary resources, and ii) even if there are such experts, describing all the intricacies of a language is time-consuming and prone to omission. In this article, we present an automatic framework that aims to facilitate this process by automatically discovering and visualizing descriptions of different aspects of grammar. Specifically, we extract descriptions from a natural text corpus that answer questions about morphosyntax (learning of word order, agreement, case marking, or word formation) and semantics (learning of vocabulary) and show illustrative examples. We apply this method for teaching the Indian languages, Kannada and Marathi, which, unlike English, do not have well-developed pedagogical resources and, therefore, are likely to benefit from this exercise. To assess the perceived utility of the extracted material, we enlist the help of language educators from schools in North America who teach these languages to perform a manual evaluation. Overall, teachers find the materials to be interesting as a reference material for their own lesson preparation or even for learner evaluation.
Explainable nonlinear modelling of multiple time series with invertible neural networks
Jul 01, 2021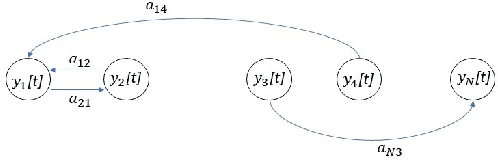
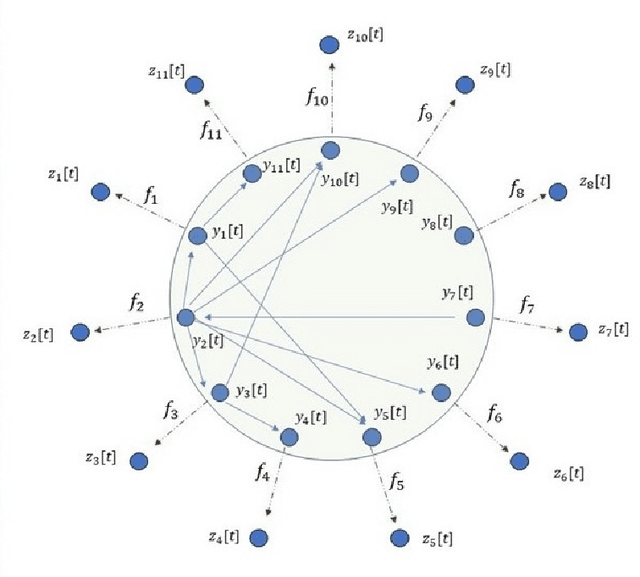
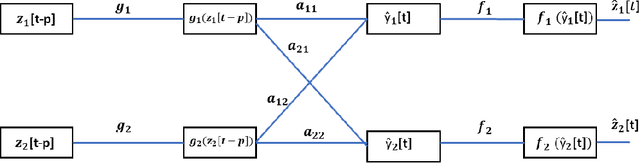
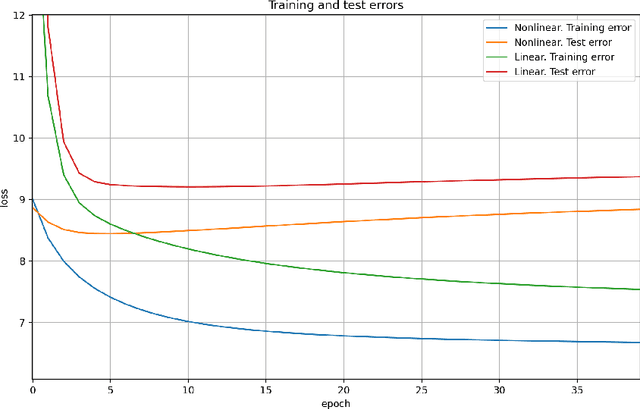
A method for nonlinear topology identification is proposed, based on the assumption that a collection of time series are generated in two steps: i) a vector autoregressive process in a latent space, and ii) a nonlinear, component-wise, monotonically increasing observation mapping. The latter mappings are assumed invertible, and are modelled as shallow neural networks, so that their inverse can be numerically evaluated, and their parameters can be learned using a technique inspired in deep learning. Due to the function inversion, the back-propagation step is not straightforward, and this paper explains the steps needed to calculate the gradients applying implicit differentiation. Whereas the model explainability is the same as that for linear VAR processes, preliminary numerical tests show that the prediction error becomes smaller.
A Survey of Research on Fair Recommender Systems
May 25, 2022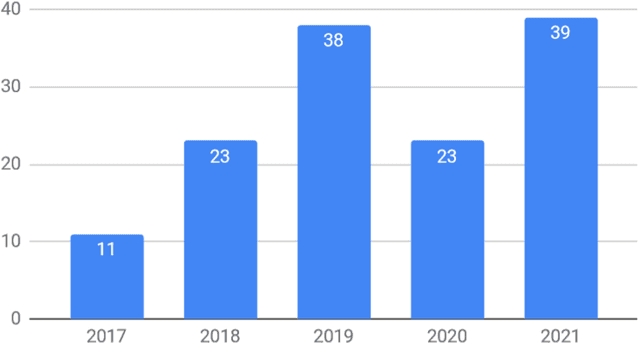
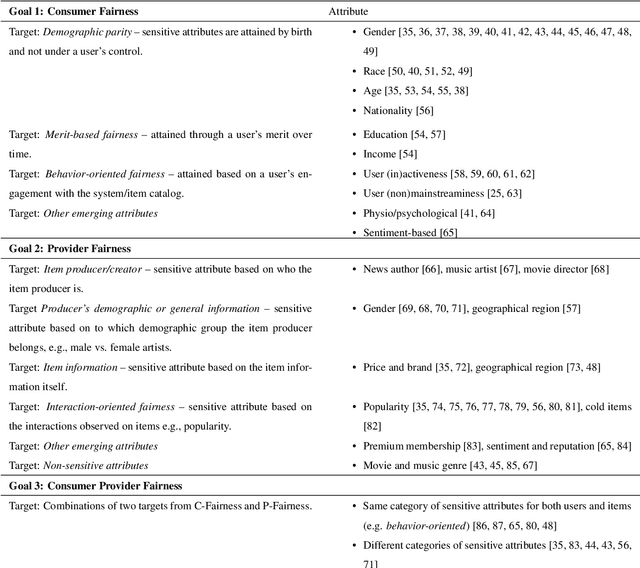
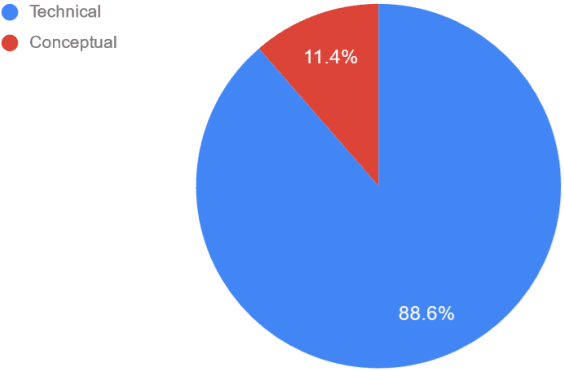
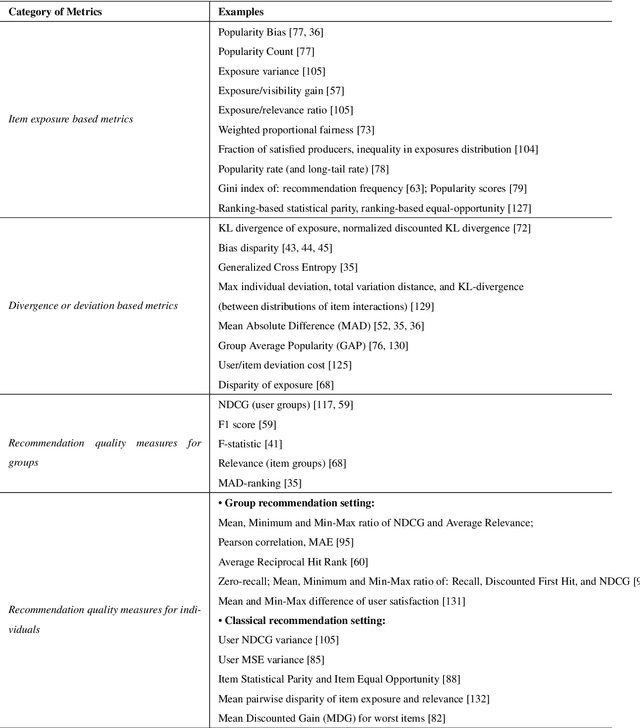
Recommender systems can strongly influence which information we see online, e.g, on social media, and thus impact our beliefs, decisions, and actions. At the same time, these systems can create substantial business value for different stakeholders. Given the growing potential impact of such AI-based systems on individuals, organizations, and society, questions of fairness have gained increased attention in recent years. However, research on fairness in recommender systems is still a developing area. In this survey, we first review the fundamental concepts and notions of fairness that were put forward in the area in the recent past. Afterward, we provide a survey of how research in this area is currently operationalized, for example, in terms of the general research methodology, fairness metrics, and algorithmic approaches. Overall, our analysis of recent works points to certain research gaps. In particular, we find that in many research works in computer science very abstract problem operationalizations are prevalent, which circumvent the fundamental and important question of what represents a fair recommendation in the context of a given application.
Collaborative Bimanual Manipulation Using Optimal Motion Adaptation and Interaction Control
Jun 01, 2022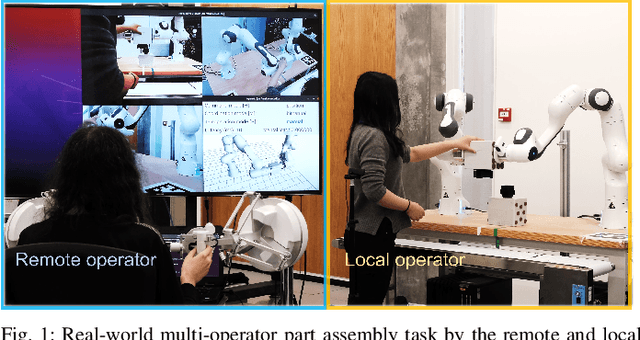
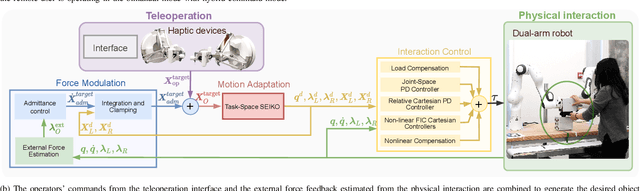
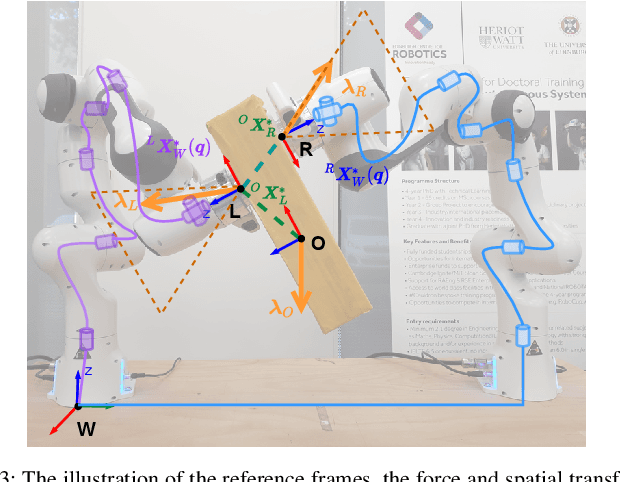
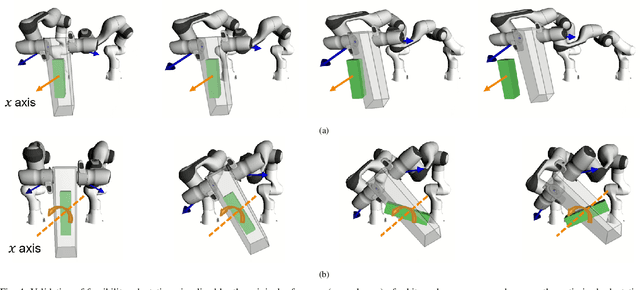
This work developed collaborative bimanual manipulation for reliable and safe human-robot collaboration, which allows remote and local human operators to work interactively for bimanual tasks. We proposed an optimal motion adaptation to retarget arbitrary commands from multiple human operators into feasible control references. The collaborative manipulation framework has three main modules: (1) contact force modulation for compliant physical interactions with objects via admittance control; (2) task-space sequential equilibrium and inverse kinematics optimization, which adapts interactive commands from multiple operators to feasible motions by satisfying the task constraints and physical limits of the robots; and (3) an interaction controller adopted from the fractal impedance control, which is robust to time delay and stable to superimpose multiple control efforts for generating desired joint torques and controlling the dual-arm robots. Extensive experiments demonstrated the capability of the collaborative bimanual framework, including (1) dual-arm teleoperation that adapts arbitrary infeasible commands that violate joint torque limits into continuous operations within safe boundaries, compared to failures without the proposed optimization; (2) robust maneuver of a stack of objects via physical interactions in presence of model inaccuracy; (3) collaborative multi-operator part assembly, and teleoperated industrial connector insertion, which validate the guaranteed stability of reliable human-robot co-manipulation.
Collective Relevance Labeling for Passage Retrieval
May 09, 2022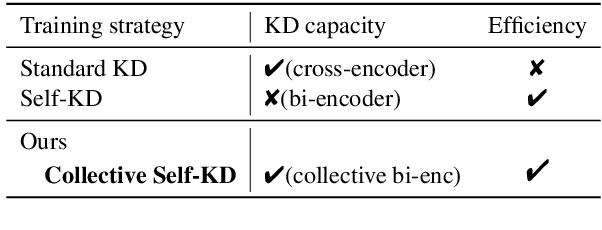
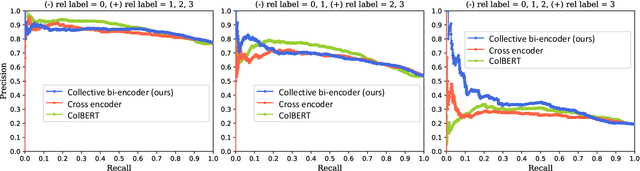
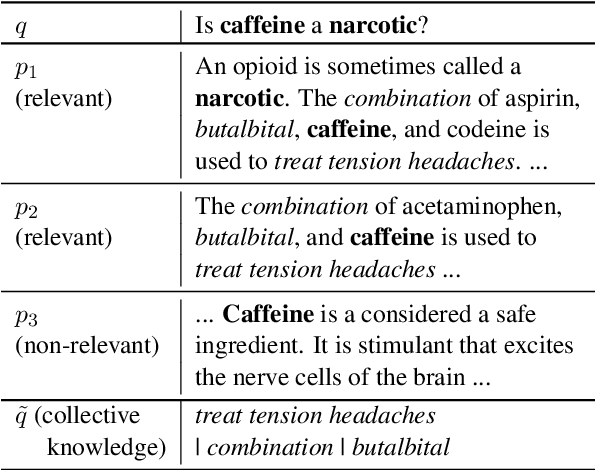
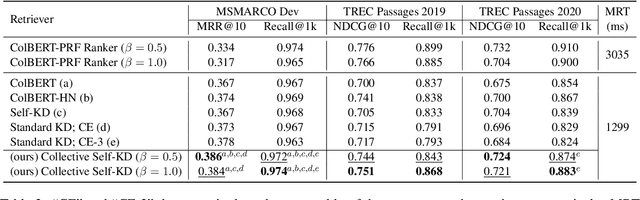
Deep learning for Information Retrieval (IR) requires a large amount of high-quality query-document relevance labels, but such labels are inherently sparse. Label smoothing redistributes some observed probability mass over unobserved instances, often uniformly, uninformed of the true distribution. In contrast, we propose knowledge distillation for informed labeling, without incurring high computation overheads at evaluation time. Our contribution is designing a simple but efficient teacher model which utilizes collective knowledge, to outperform state-of-the-arts distilled from a more complex teacher model. Specifically, we train up to x8 faster than the state-of-the-art teacher, while distilling the rankings better. Our code is publicly available at https://github.com/jihyukkim-nlp/CollectiveKD
YOLinO: Generic Single Shot Polyline Detection in Real Time
Mar 26, 2021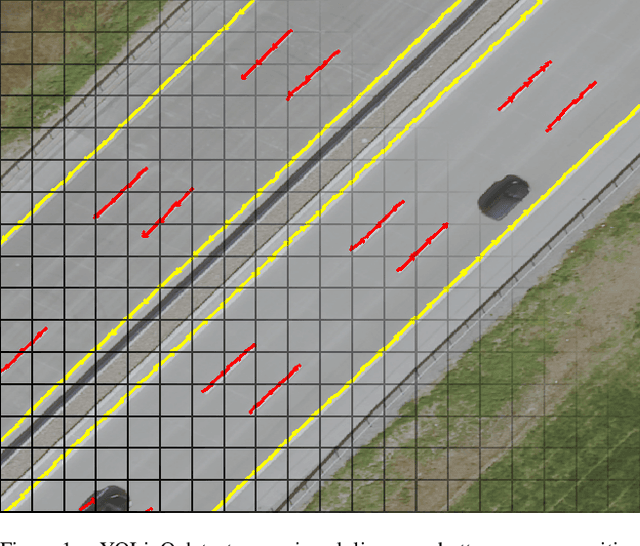
The detection of polylines in images is usually either bound to branchless polylines or formulated in a recurrent way, prohibiting their use in real-time systems. We propose an approach that transfers the idea of single shot object detection. Reformulating the problem of polyline detection as bottom-up composition of small line segments allows to detect bounded, dashed and continuous polylines with a single head. This has several major advantages over previous methods. Not only is the method at 187 fps more than suited for real-time applications with virtually any restriction on the shapes of the detected polylines. By predicting multiple line segments for each spatial cell, even branching or crossing polylines can be detected. We evaluate our approach on three different applications for road marking, lane border and center line detection. Hereby, we demonstrate the ability to generalize to different domains as well as both implicit and explicit polyline detection tasks.
Is a Question Decomposition Unit All We Need?
May 25, 2022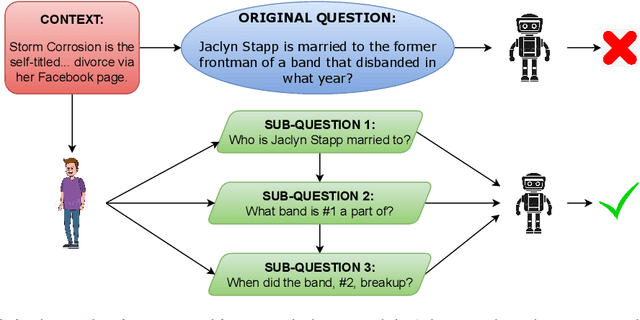
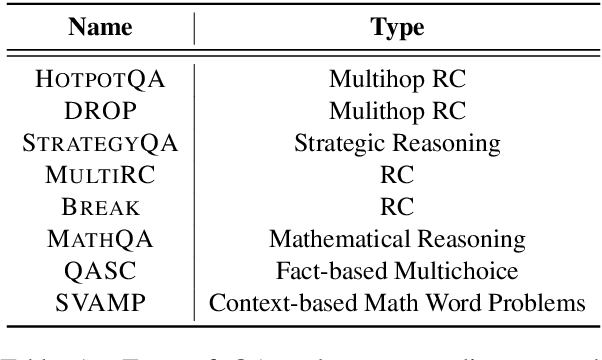
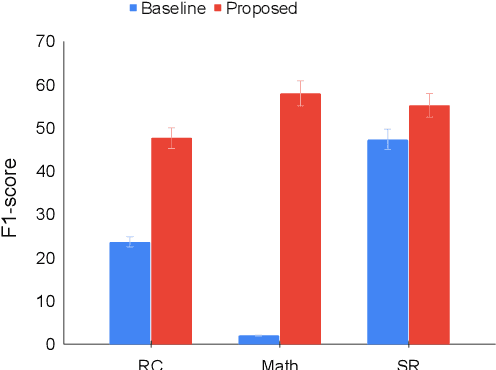
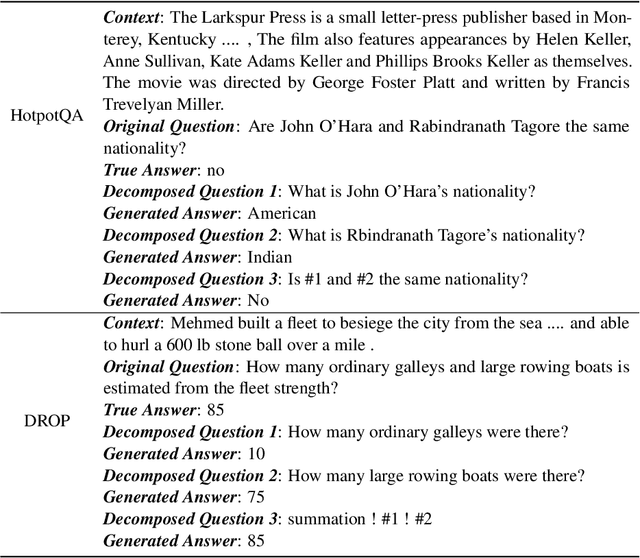
Large Language Models (LMs) have achieved state-of-the-art performance on many Natural Language Processing (NLP) benchmarks. With the growing number of new benchmarks, we build bigger and more complex LMs. However, building new LMs may not be an ideal option owing to the cost, time and environmental impact associated with it. We explore an alternative route: can we modify data by expressing it in terms of the model's strengths, so that a question becomes easier for models to answer? We investigate if humans can decompose a hard question into a set of simpler questions that are relatively easier for models to solve. We analyze a range of datasets involving various forms of reasoning and find that it is indeed possible to significantly improve model performance (24% for GPT3 and 29% for RoBERTa-SQuAD along with a symbolic calculator) via decomposition. Our approach provides a viable option to involve people in NLP research in a meaningful way. Our findings indicate that Human-in-the-loop Question Decomposition (HQD) can potentially provide an alternate path to building large LMs.
mPLUG: Effective and Efficient Vision-Language Learning by Cross-modal Skip-connections
May 25, 2022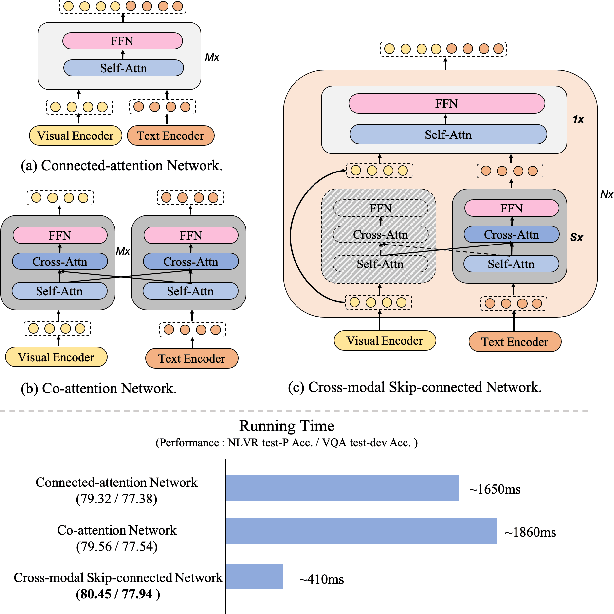
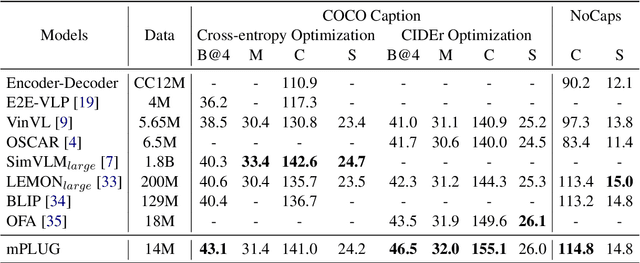
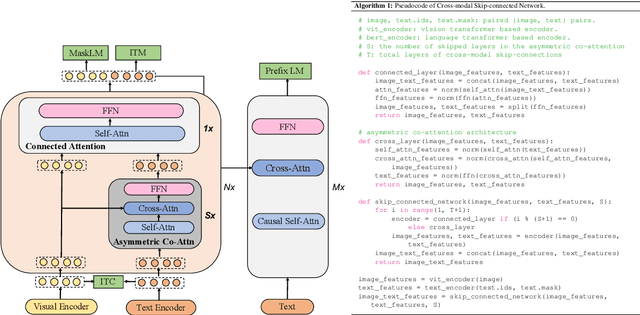
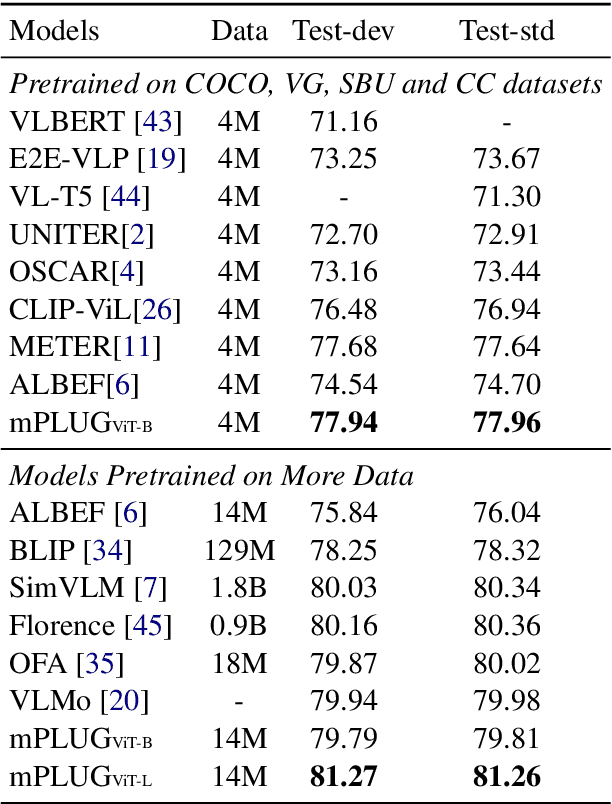
Large-scale pretrained foundation models have been an emerging paradigm for building artificial intelligence (AI) systems, which can be quickly adapted to a wide range of downstream tasks. This paper presents mPLUG, a new vision-language foundation model for both cross-modal understanding and generation. Most existing pre-trained models suffer from the problems of low computational efficiency and information asymmetry brought by the long visual sequence in cross-modal alignment. To address these problems, mPLUG introduces an effective and efficient vision-language architecture with novel cross-modal skip-connections, which creates inter-layer shortcuts that skip a certain number of layers for time-consuming full self-attention on the vision side. mPLUG is pre-trained end-to-end on large-scale image-text pairs with both discriminative and generative objectives. It achieves state-of-the-art results on a wide range of vision-language downstream tasks, such as image captioning, image-text retrieval, visual grounding and visual question answering. mPLUG also demonstrates strong zero-shot transferability when directly transferred to multiple video-language tasks.