 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHand-in-the-Loop: Improving Dexterous VLA via Seamless Interventional Correction
May 14, 2026Vision-Language-Action (VLA) models are prone to compounding errors in dexterous manipulation, where high-dimensional action spaces and contact-rich dynamics amplify small policy deviations over long horizons. While Interactive Imitation Learning (IIL) can refine policies through human takeover data, applying it to high-degree-of-freedom (DoF) robotic hands remains challenging due to a command mismatch between human teleoperation and policy execution at the takeover moment, which causes abrupt robot-hand configuration changes, or "gesture jumps". We present Hand-in-the-Loop (HandITL), a seamless human-in-the-loop intervention method that blends human corrective intent with autonomous policy execution to avoid gesture jumps during bimanual dexterous manipulation. Compared with direct teleoperation takeover, HandITL reduces takeover jitter by 99.8% and preserves robust post-takeover manipulation, reducing grasp failures by 87.5% and mean completion time by 19.1%. We validate HandITL on tasks requiring bimanual coordination, tool use, and fine-grained long-horizon manipulation. When used to collect intervention data for policy refinement, HandITL yields policies that outperform those trained with standard teleoperation data by 19% on average across three long-horizon dexterous tasks.
GR-Dexter Technical Report
Dec 30, 2025Vision-language-action (VLA) models have enabled language-conditioned, long-horizon robot manipulation, but most existing systems are limited to grippers. Scaling VLA policies to bimanual robots with high degree-of-freedom (DoF) dexterous hands remains challenging due to the expanded action space, frequent hand-object occlusions, and the cost of collecting real-robot data. We present GR-Dexter, a holistic hardware-model-data framework for VLA-based generalist manipulation on a bimanual dexterous-hand robot. Our approach combines the design of a compact 21-DoF robotic hand, an intuitive bimanual teleoperation system for real-robot data collection, and a training recipe that leverages teleoperated robot trajectories together with large-scale vision-language and carefully curated cross-embodiment datasets. Across real-world evaluations spanning long-horizon everyday manipulation and generalizable pick-and-place, GR-Dexter achieves strong in-domain performance and improved robustness to unseen objects and unseen instructions. We hope GR-Dexter serves as a practical step toward generalist dexterous-hand robotic manipulation.
Feasibility Retargeting for Multi-contact Teleoperation and Physical Interaction
Aug 07, 2023



This short paper outlines two recent works on multi-contact teleoperation and the development of the SEIKO (Sequential Equilibrium Inverse Kinematic Optimization) framework. SEIKO adapts commands from the operator in real-time and ensures that the reference configuration sent to the underlying controller is feasible. Additionally, an admittance scheme is used to implement physical interaction, which is then combined with the operator's command and retargeted. SEIKO has been applied in simulations on various robots, including humanoid and quadruped robots designed for loco-manipulation. Furthermore, SEIKO has been tested on real hardware for bimanual heavy object carrying tasks.
Learning Fine Pinch-Grasp Skills using Tactile Sensing from Real Demonstration Data
Jul 10, 2023



This work develops a data-efficient learning from demonstration framework which exploits the use of rich tactile sensing and achieves fine dexterous bimanual manipulation. Specifically, we formulated a convolutional autoencoder network that can effectively extract and encode high-dimensional tactile information. Further, we developed a behaviour cloning network that can learn human-like sensorimotor skills demonstrated directly on the robot hardware in the task space by fusing both proprioceptive and tactile feedback. Our comparison study with the baseline method revealed the effectiveness of the contact information, which enabled successful extraction and replication of the demonstrated motor skills. Extensive experiments on real dual-arm robots demonstrated the robustness and effectiveness of the fine pinch grasp policy directly learned from one-shot demonstration, including grasping of the same object with different initial poses, generalizing to ten unseen new objects, robust and firm grasping against external pushes, as well as contact-aware and reactive re-grasping in case of dropping objects under very large perturbations. Moreover, the saliency map method is employed to describe the weight distribution across various modalities during pinch grasping. The video is available online at: \href{https://youtu.be/4Pg29bUBKqs}{https://youtu.be/4Pg29bUBKqs}.
Multi-Contact Motion Retargeting using Whole-body Optimization of Full Kinematics and Sequential Force Equilibrium
Jun 01, 2022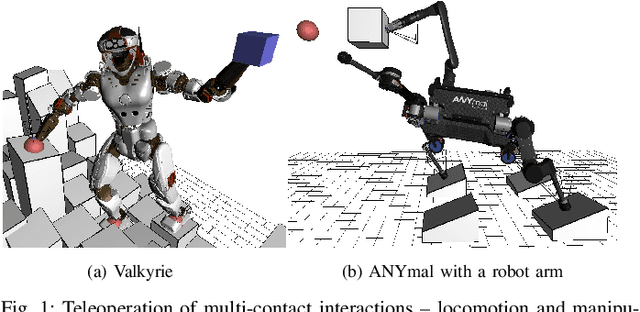
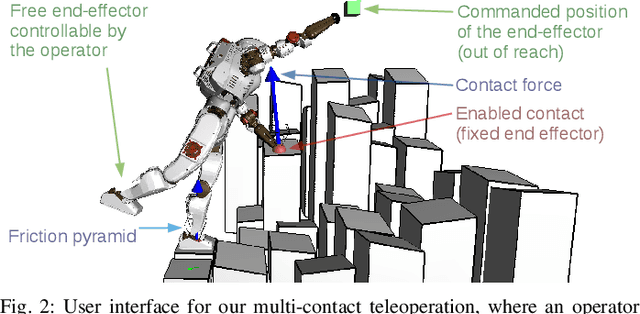
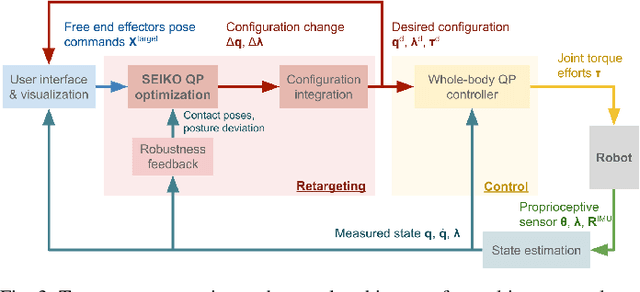
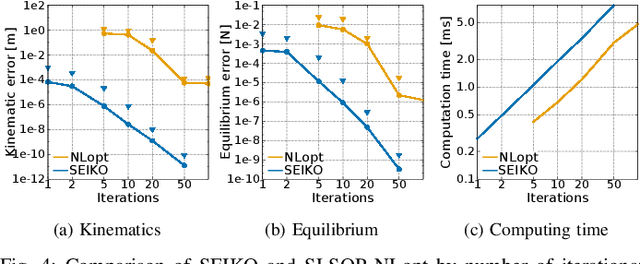
This paper presents a multi-contact motion adaptation framework that enables teleoperation of high degree-of-freedom (DoF) robots, such as quadrupeds and humanoids, for loco-manipulation tasks in multi-contact settings. Our proposed algorithms optimize whole-body configurations and formulate the retargeting of multi-contact motions as sequential quadratic programming, which is robust and stable near the edges of feasibility constraints. Our framework allows real-time operation of the robot and reduces cognitive load for the operator because infeasible commands are automatically adapted into physically stable and viable motions on the robot. The results in simulations with full dynamics demonstrated the effectiveness of teleoperating different legged robots interactively and generating rich multi-contact movements. We evaluated the computational efficiency of the proposed algorithms, and further validated and analyzed multi-contact loco-manipulation tasks on humanoid and quadruped robots by reaching, active pushing and various traversal on uneven terrains.
Collaborative Bimanual Manipulation Using Optimal Motion Adaptation and Interaction Control
Jun 01, 2022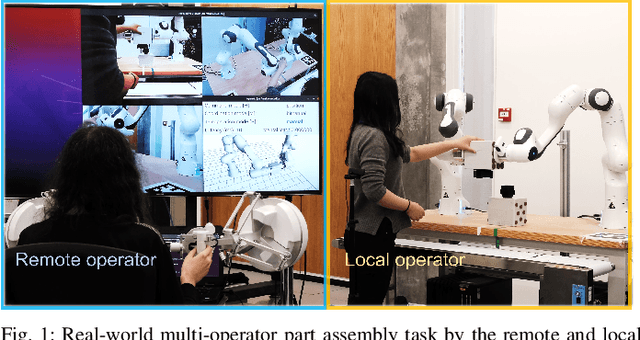
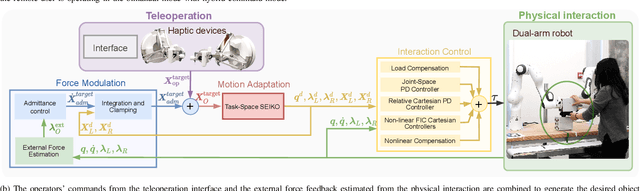
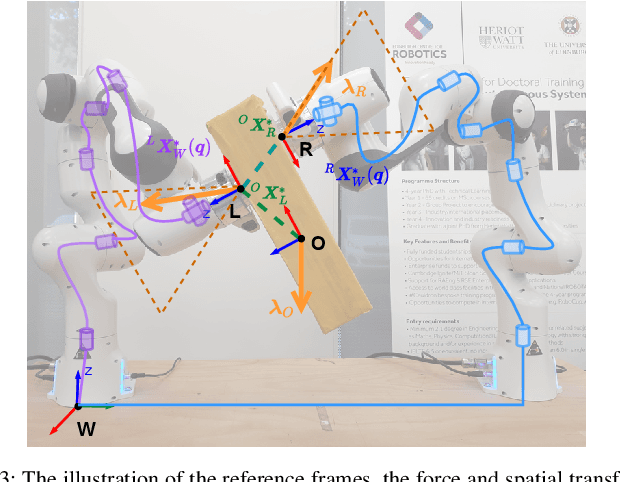
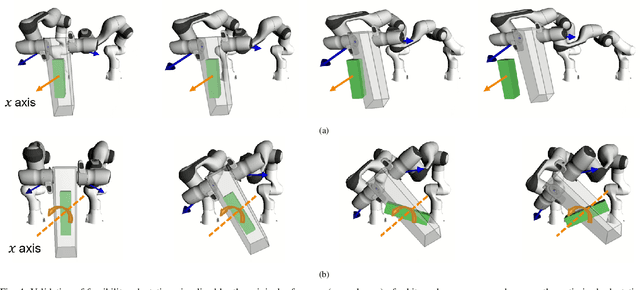
This work developed collaborative bimanual manipulation for reliable and safe human-robot collaboration, which allows remote and local human operators to work interactively for bimanual tasks. We proposed an optimal motion adaptation to retarget arbitrary commands from multiple human operators into feasible control references. The collaborative manipulation framework has three main modules: (1) contact force modulation for compliant physical interactions with objects via admittance control; (2) task-space sequential equilibrium and inverse kinematics optimization, which adapts interactive commands from multiple operators to feasible motions by satisfying the task constraints and physical limits of the robots; and (3) an interaction controller adopted from the fractal impedance control, which is robust to time delay and stable to superimpose multiple control efforts for generating desired joint torques and controlling the dual-arm robots. Extensive experiments demonstrated the capability of the collaborative bimanual framework, including (1) dual-arm teleoperation that adapts arbitrary infeasible commands that violate joint torque limits into continuous operations within safe boundaries, compared to failures without the proposed optimization; (2) robust maneuver of a stack of objects via physical interactions in presence of model inaccuracy; (3) collaborative multi-operator part assembly, and teleoperated industrial connector insertion, which validate the guaranteed stability of reliable human-robot co-manipulation.
Force-guided High-precision Grasping Control of Fragile and Deformable Objects using sEMG-based Force Prediction
Feb 05, 2020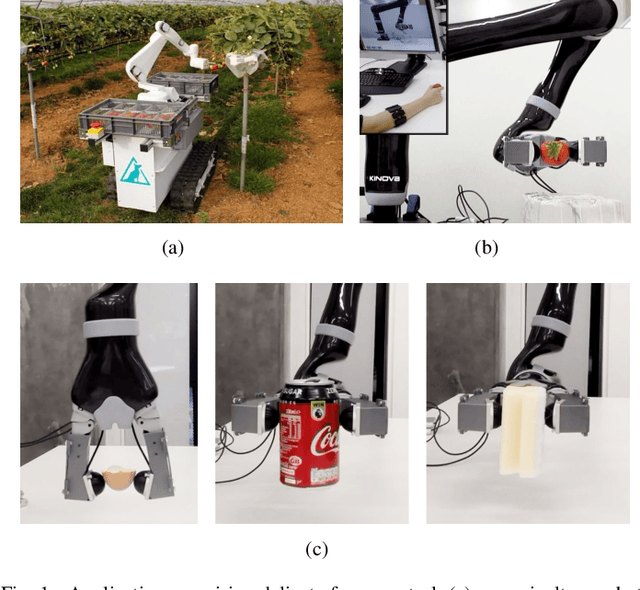
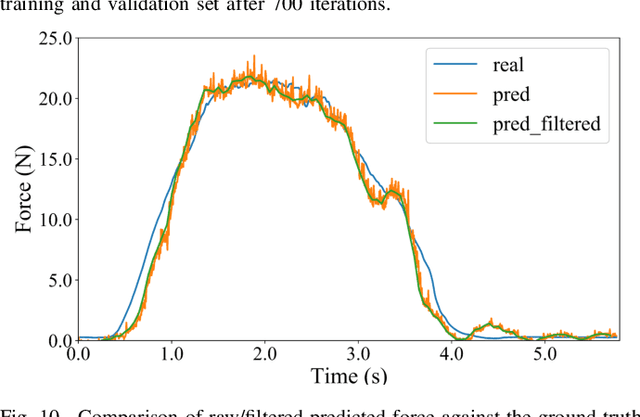
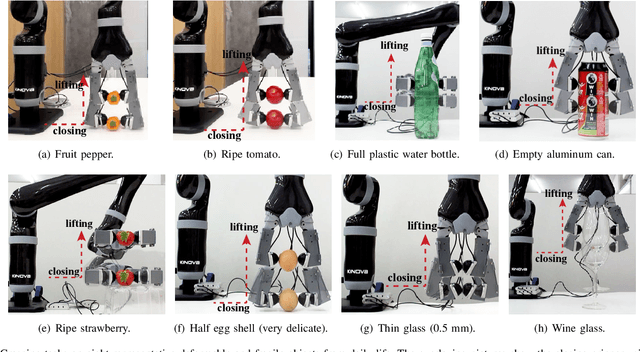
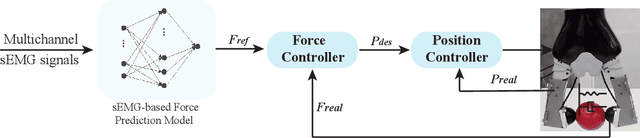
Regulating contact forces with high precision is crucial for grasping and manipulating fragile or deformable objects. We aim to utilize the dexterity of human hands to regulate the contact forces for robotic hands and exploit human sensory-motor synergies in a wearable and non-invasive way. We extracted force information from the electric activities of skeletal muscles during their voluntary contractions through surface electromyography (sEMG). We built a regression model based on a Neural Network to predict the gripping force from the preprocessed sEMG signals and achieved high accuracy (R2 = 0.982). Based on the force command predicted from human muscles, we developed a force-guided control framework, where force control was realized via an admittance controller that tracked the predicted gripping force reference to grasp delicate and deformable objects. We demonstrated the effectiveness of the proposed method on a set of representative fragile and deformable objects from daily life, all of which were successfully grasped without any damage or deformation.