 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-evolving LLM agents with in-distribution Optimization
Jun 05, 2026Large Language Models (LLMs) have recently emerged as powerful controllers for interactive agents in complex environments, yet training them to perform reliable long-horizon decision making remains a fundamental challenge. A key difficulty lies in credit assignment: agents often receive delayed rewards only at the end of episodes. In this paper, we propose Q-Evolve, a self-evolving framework for LLM agents that unifies automatic process-reward labeling and policy learning within a principled in-distribution reinforcement learning paradigm. In each evolving iteration, our method learns an in-distribution critic from a hybrid off-policy dataset that combines expert demonstrations with agent-generated trajectories, stabilizing Bellman backups in sparse-reward settings via a weighted Implicit Q-Learning objective. The learned value function is then used to derive step-wise process rewards through advantage estimation, enabling dense and reliable supervision without environment backtracking or human annotation. Leveraging these signals, we perform behavior-proximal policy optimization that evolves the agent over the data used for process reward labeling, allowing iterative self-improvement without exacerbating distribution shift. We evaluate our method on AlfWorld, WebShop, and ScienceWorld, showing Q-Evolve outperforms strong baselines in sample efficiency, robustness, and overall task performance. Our results demonstrate that stable agent self-evolution is achievable through the co-evolution of process-level supervision and policy, both grounded within a shared in-distribution learning loop.
DOG-DPO:Dynamic Optimization in Geometry for Safety Alignment
Jun 04, 2026Safety alignment for large language models relies on preference data, but current pipelines often train on large, redundant datasets. Existing data selection methods typically score each preference pair independently, collapsing directional preference information into scalar quality or diversity scores. This sample-centric view is especially limiting in multi-dataset settings, where shared safety directions coexist with dataset-specific residual risks. We propose DOG-DPO, a training-free data selection framework that treats preference pairs as structured geometric signals. DOG-DPO first represents each preference pair as a direction in model representation space. It then decomposes multi-dataset preference geometry into a global anchor subspace and dataset-specific residual subspaces. Finally, it selects subsets by maximizing diversity-based coverage, encouraging broad, non-redundant coverage of alignment directions before DPO training. Across six safety benchmarks and two model backbones, DOG-DPO achieves a strong utility-robustness trade-off using only 11% of the preference pairs. It recovers most of the safety gains of full-data training while remaining entirely teacher-free, training-free, and substantially faster than representative selection baselines.
GraphRAG-IRL: Personalized Recommendation with Graph-Grounded Inverse Reinforcement Learning and LLM Re-ranking
Apr 21, 2026Personalized recommendation requires models that capture sequential user preferences while remaining robust to sparse feedback and semantic ambiguity. Recent work has explored large language models (LLMs) as recommenders and re-rankers, but pure prompt-based ranking often suffers from poor calibration, sensitivity to candidate ordering, and popularity bias. These limitations make LLMs useful semantic reasoners, but unreliable as standalone ranking engines. We present \textbf{GraphRAG-IRL}, a hybrid recommendation framework that combines graph-grounded feature construction, inverse reinforcement learning (IRL), and persona-guided LLM re-ranking. Our method constructs a heterogeneous knowledge graph over items, categories, and concepts, retrieves both individual and community preference context, and uses these signals to train a Maximum Entropy IRL model for calibrated pre-ranking. An LLM is then applied only to a short candidate list, where persona-guided prompts provide complementary semantic judgments that are fused with IRL rankings. Experiments show that GraphRAG-IRL is a strong standalone recommender: IRL-MLP with GraphRAG improves NDCG@10 by 15.7\% on MovieLens and 16.6\% on KuaiRand over supervised baselines. The results also show that IRL and GraphRAG are superadditive, with the combined gain exceeding the sum of their individual improvements. Persona-guided LLM fusion further improves ranking quality, yielding up to 16.8\% NDCG@10 improvement over the IRL-only baseline on MovieLens ml-1m, while score fusion on KuaiRand provides consistent gains of 4--6\% across LLM providers.
ScribbleSense: Generative Scribble-Based Texture Editing with Intent Prediction
Jan 30, 2026Interactive 3D model texture editing presents enhanced opportunities for creating 3D assets, with freehand drawing style offering the most intuitive experience. However, existing methods primarily support sketch-based interactions for outlining, while the utilization of coarse-grained scribble-based interaction remains limited. Furthermore, current methodologies often encounter challenges due to the abstract nature of scribble instructions, which can result in ambiguous editing intentions and unclear target semantic locations. To address these issues, we propose ScribbleSense, an editing method that combines multimodal large language models (MLLMs) and image generation models to effectively resolve these challenges. We leverage the visual capabilities of MLLMs to predict the editing intent behind the scribbles. Once the semantic intent of the scribble is discerned, we employ globally generated images to extract local texture details, thereby anchoring local semantics and alleviating ambiguities concerning the target semantic locations. Experimental results indicate that our method effectively leverages the strengths of MLLMs, achieving state-of-the-art interactive editing performance for scribble-based texture editing.
C-TLSAN: Content-Enhanced Time-Aware Long- and Short-Term Attention Network for Personalized Recommendation
Jun 16, 2025Sequential recommender systems aim to model users' evolving preferences by capturing patterns in their historical interactions. Recent advances in this area have leveraged deep neural networks and attention mechanisms to effectively represent sequential behaviors and time-sensitive interests. In this work, we propose C-TLSAN (Content-Enhanced Time-Aware Long- and Short-Term Attention Network), an extension of the TLSAN architecture that jointly models long- and short-term user preferences while incorporating semantic content associated with items, such as product descriptions. C-TLSAN enriches the recommendation pipeline by embedding textual content linked to users' historical interactions directly into both long-term and short-term attention layers. This allows the model to learn from both behavioral patterns and rich item content, enhancing user and item representations across temporal dimensions. By fusing sequential signals with textual semantics, our approach improves the expressiveness and personalization capacity of recommendation systems. We conduct extensive experiments on large-scale Amazon datasets, benchmarking C-TLSAN against state-of-the-art baselines, including recent sequential recommenders based on Large Language Models (LLMs), which represent interaction history and predictions in text form. Empirical results demonstrate that C-TLSAN consistently outperforms strong baselines in next-item prediction tasks. Notably, it improves AUC by 1.66%, Recall@10 by 93.99%, and Precision@10 by 94.80% on average over the best-performing baseline (TLSAN) across 10 Amazon product categories. These results highlight the value of integrating content-aware enhancements into temporal modeling frameworks for sequential recommendation. Our code is available at https://github.com/booml247/cTLSAN.
MiniCPM4: Ultra-Efficient LLMs on End Devices
Jun 09, 2025



This paper introduces MiniCPM4, a highly efficient large language model (LLM) designed explicitly for end-side devices. We achieve this efficiency through systematic innovation in four key dimensions: model architecture, training data, training algorithms, and inference systems. Specifically, in terms of model architecture, we propose InfLLM v2, a trainable sparse attention mechanism that accelerates both prefilling and decoding phases for long-context processing. Regarding training data, we propose UltraClean, an efficient and accurate pre-training data filtering and generation strategy, and UltraChat v2, a comprehensive supervised fine-tuning dataset. These datasets enable satisfactory model performance to be achieved using just 8 trillion training tokens. Regarding training algorithms, we propose ModelTunnel v2 for efficient pre-training strategy search, and improve existing post-training methods by introducing chunk-wise rollout for load-balanced reinforcement learning and data-efficient tenary LLM, BitCPM. Regarding inference systems, we propose CPM.cu that integrates sparse attention, model quantization, and speculative sampling to achieve efficient prefilling and decoding. To meet diverse on-device requirements, MiniCPM4 is available in two versions, with 0.5B and 8B parameters, respectively. Sufficient evaluation results show that MiniCPM4 outperforms open-source models of similar size across multiple benchmarks, highlighting both its efficiency and effectiveness. Notably, MiniCPM4-8B demonstrates significant speed improvements over Qwen3-8B when processing long sequences. Through further adaptation, MiniCPM4 successfully powers diverse applications, including trustworthy survey generation and tool use with model context protocol, clearly showcasing its broad usability.
Speculative Decoding Meets Quantization: Compatibility Evaluation and Hierarchical Framework Design
May 29, 2025Speculative decoding and quantization effectively accelerate memory-bound inference of large language models. Speculative decoding mitigates the memory bandwidth bottleneck by verifying multiple tokens within a single forward pass, which increases computational effort. Quantization achieves this optimization by compressing weights and activations into lower bit-widths and also reduces computations via low-bit matrix multiplications. To further leverage their strengths, we investigate the integration of these two techniques. Surprisingly, experiments applying the advanced speculative decoding method EAGLE-2 to various quantized models reveal that the memory benefits from 4-bit weight quantization are diminished by the computational load from speculative decoding. Specifically, verifying a tree-style draft incurs significantly more time overhead than a single-token forward pass on 4-bit weight quantized models. This finding led to our new speculative decoding design: a hierarchical framework that employs a small model as an intermediate stage to turn tree-style drafts into sequence drafts, leveraging the memory access benefits of the target quantized model. Experimental results show that our hierarchical approach achieves a 2.78$\times$ speedup across various tasks for the 4-bit weight Llama-3-70B model on an A100 GPU, outperforming EAGLE-2 by 1.31$\times$. Code available at https://github.com/AI9Stars/SpecMQuant.
Consistent Image Layout Editing with Diffusion Models
Mar 09, 2025Despite the great success of large-scale text-to-image diffusion models in image generation and image editing, existing methods still struggle to edit the layout of real images. Although a few works have been proposed to tackle this problem, they either fail to adjust the layout of images, or have difficulty in preserving visual appearance of objects after the layout adjustment. To bridge this gap, this paper proposes a novel image layout editing method that can not only re-arrange a real image to a specified layout, but also can ensure the visual appearance of the objects consistent with their appearance before editing. Concretely, the proposed method consists of two key components. Firstly, a multi-concept learning scheme is used to learn the concepts of different objects from a single image, which is crucial for keeping visual consistency in the layout editing. Secondly, it leverages the semantic consistency within intermediate features of diffusion models to project the appearance information of objects to the desired regions directly. Besides, a novel initialization noise design is adopted to facilitate the process of re-arranging the layout. Extensive experiments demonstrate that the proposed method outperforms previous works in both layout alignment and visual consistency for the task of image layout editing
Distill Not Only Data but Also Rewards: Can Smaller Language Models Surpass Larger Ones?
Feb 26, 2025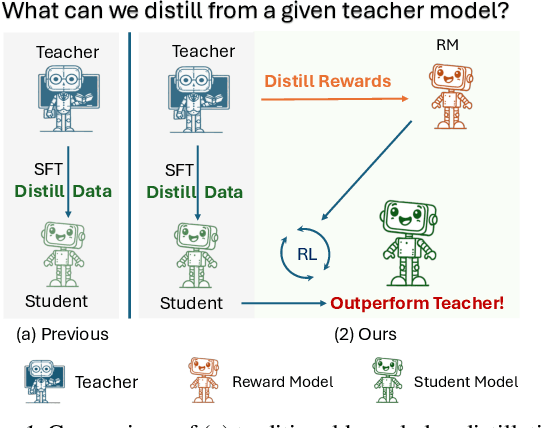

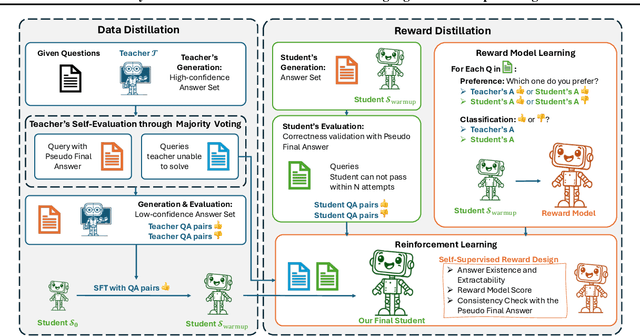
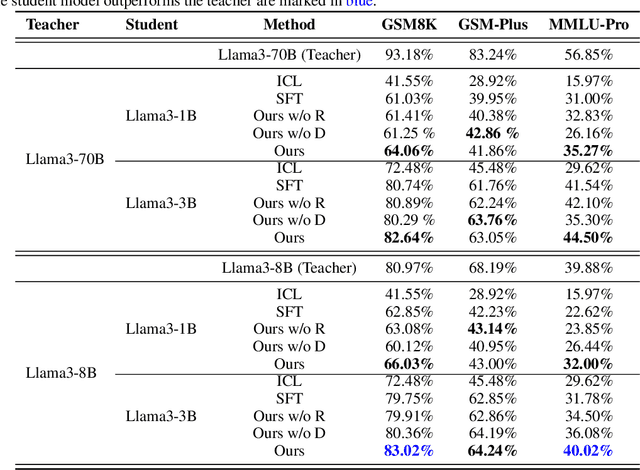
Distilling large language models (LLMs) typically involves transferring the teacher model's responses through supervised fine-tuning (SFT). However, this approach neglects the potential to distill both data (output content) and reward signals (quality evaluations). Extracting reliable reward signals directly from teacher models is challenging, as LLMs are optimized for generation rather than evaluation, often resulting in biased or inconsistent assessments. To address this limitation, we propose a novel distillation pipeline that transfers both responses and rewards. Our method generates pseudo-rewards through a self-supervised mechanism that leverages the inherent structure of both teacher and student responses, enabling reward learning without explicit external evaluation. The reward model subsequently guides reinforcement learning (RL), allowing iterative refinement of the student model after an SFT warm-up phase. Experiments on GSM8K and MMLU-PRO demonstrate that our method consistently outperforms traditional SFT-based approaches, enabling student models to surpass the performance of their teachers. This work highlights the potential for scalable, efficient distillation through structured self-supervised reward learning, reducing dependence on external reward supervision.
FR-Spec: Accelerating Large-Vocabulary Language Models via Frequency-Ranked Speculative Sampling
Feb 20, 2025Speculative sampling has emerged as an important technique for accelerating the auto-regressive generation process of large language models (LLMs) by utilizing a draft-then-verify mechanism to produce multiple tokens per forward pass. While state-of-the-art speculative sampling methods use only a single layer and a language modeling (LM) head as the draft model to achieve impressive layer compression, their efficiency gains are substantially reduced for large-vocabulary LLMs, such as Llama-3-8B with a vocabulary of 128k tokens. To address this, we present FR-Spec, a frequency-ranked speculative sampling framework that optimizes draft candidate selection through vocabulary space compression. By constraining the draft search to a frequency-prioritized token subset, our method reduces LM Head computation overhead by 75% while ensuring the equivalence of the final output distribution. Experiments across multiple datasets demonstrate an average of 1.12$\times$ speedup over the state-of-the-art speculative sampling method EAGLE-2.