 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse Video Generation Propels Real-World Beyond-the-View Vision-Language Navigation
Feb 05, 2026Why must vision-language navigation be bound to detailed and verbose language instructions? While such details ease decision-making, they fundamentally contradict the goal for navigation in the real-world. Ideally, agents should possess the autonomy to navigate in unknown environments guided solely by simple and high-level intents. Realizing this ambition introduces a formidable challenge: Beyond-the-View Navigation (BVN), where agents must locate distant, unseen targets without dense and step-by-step guidance. Existing large language model (LLM)-based methods, though adept at following dense instructions, often suffer from short-sighted behaviors due to their reliance on short-horimzon supervision. Simply extending the supervision horizon, however, destabilizes LLM training. In this work, we identify that video generation models inherently benefit from long-horizon supervision to align with language instructions, rendering them uniquely suitable for BVN tasks. Capitalizing on this insight, we propose introducing the video generation model into this field for the first time. Yet, the prohibitive latency for generating videos spanning tens of seconds makes real-world deployment impractical. To bridge this gap, we propose SparseVideoNav, achieving sub-second trajectory inference guided by a generated sparse future spanning a 20-second horizon. This yields a remarkable 27x speed-up compared to the unoptimized counterpart. Extensive real-world zero-shot experiments demonstrate that SparseVideoNav achieves 2.5x the success rate of state-of-the-art LLM baselines on BVN tasks and marks the first realization of such capability in challenging night scenes.
C-TLSAN: Content-Enhanced Time-Aware Long- and Short-Term Attention Network for Personalized Recommendation
Jun 16, 2025Sequential recommender systems aim to model users' evolving preferences by capturing patterns in their historical interactions. Recent advances in this area have leveraged deep neural networks and attention mechanisms to effectively represent sequential behaviors and time-sensitive interests. In this work, we propose C-TLSAN (Content-Enhanced Time-Aware Long- and Short-Term Attention Network), an extension of the TLSAN architecture that jointly models long- and short-term user preferences while incorporating semantic content associated with items, such as product descriptions. C-TLSAN enriches the recommendation pipeline by embedding textual content linked to users' historical interactions directly into both long-term and short-term attention layers. This allows the model to learn from both behavioral patterns and rich item content, enhancing user and item representations across temporal dimensions. By fusing sequential signals with textual semantics, our approach improves the expressiveness and personalization capacity of recommendation systems. We conduct extensive experiments on large-scale Amazon datasets, benchmarking C-TLSAN against state-of-the-art baselines, including recent sequential recommenders based on Large Language Models (LLMs), which represent interaction history and predictions in text form. Empirical results demonstrate that C-TLSAN consistently outperforms strong baselines in next-item prediction tasks. Notably, it improves AUC by 1.66%, Recall@10 by 93.99%, and Precision@10 by 94.80% on average over the best-performing baseline (TLSAN) across 10 Amazon product categories. These results highlight the value of integrating content-aware enhancements into temporal modeling frameworks for sequential recommendation. Our code is available at https://github.com/booml247/cTLSAN.
Distributed In-Context Learning under Non-IID Among Clients
Jul 31, 2024



Advancements in large language models (LLMs) have shown their effectiveness in multiple complicated natural language reasoning tasks. A key challenge remains in adapting these models efficiently to new or unfamiliar tasks. In-context learning (ICL) provides a promising solution for few-shot adaptation by retrieving a set of data points relevant to a query, called in-context examples (ICE), from a training dataset and providing them during the inference as context. Most existing studies utilize a centralized training dataset, yet many real-world datasets may be distributed among multiple clients, and remote data retrieval can be associated with costs. Especially when the client data are non-identical independent distributions (non-IID), retrieving from clients a proper set of ICEs needed for a test query presents critical challenges. In this paper, we first show that in this challenging setting, test queries will have different preferences among clients because of non-IIDness, and equal contribution often leads to suboptimal performance. We then introduce a novel approach to tackle the distributed non-IID ICL problem when a data usage budget is present. The principle is that each client's proper contribution (budget) should be designed according to the preference of each query for that client. Our approach uses a data-driven manner to allocate a budget for each client, tailored to each test query. Through extensive empirical studies on diverse datasets, our framework demonstrates superior performance relative to competing baselines.
Distributed Harmonization: Federated Clustered Batch Effect Adjustment and Generalization
May 23, 2024



Independent and identically distributed (i.i.d.) data is essential to many data analysis and modeling techniques. In the medical domain, collecting data from multiple sites or institutions is a common strategy that guarantees sufficient clinical diversity, determined by the decentralized nature of medical data. However, data from various sites are easily biased by the local environment or facilities, thereby violating the i.i.d. rule. A common strategy is to harmonize the site bias while retaining important biological information. The ComBat is among the most popular harmonization approaches and has recently been extended to handle distributed sites. However, when faced with situations involving newly joined sites in training or evaluating data from unknown/unseen sites, ComBat lacks compatibility and requires retraining with data from all the sites. The retraining leads to significant computational and logistic overhead that is usually prohibitive. In this work, we develop a novel Cluster ComBat harmonization algorithm, which leverages cluster patterns of the data in different sites and greatly advances the usability of ComBat harmonization. We use extensive simulation and real medical imaging data from ADNI to demonstrate the superiority of the proposed approach.
FedNoisy: Federated Noisy Label Learning Benchmark
Jun 20, 2023Federated learning has gained popularity for distributed learning without aggregating sensitive data from clients. But meanwhile, the distributed and isolated nature of data isolation may be complicated by data quality, making it more vulnerable to noisy labels. Many efforts exist to defend against the negative impacts of noisy labels in centralized or federated settings. However, there is a lack of a benchmark that comprehensively considers the impact of noisy labels in a wide variety of typical FL settings. In this work, we serve the first standardized benchmark that can help researchers fully explore potential federated noisy settings. Also, we conduct comprehensive experiments to explore the characteristics of these data settings and unravel challenging scenarios on the federated noisy label learning, which may guide method development in the future. We highlight the 20 basic settings for more than 5 datasets proposed in our benchmark and standardized simulation pipeline for federated noisy label learning. We hope this benchmark can facilitate idea verification in federated learning with noisy labels. \texttt{FedNoisy} is available at \codeword{https://github.com/SMILELab-FL/FedNoisy}.
Bubble Explorer: Fast UAV Exploration in Large-Scale and Cluttered 3D-Environments using Occlusion-Free Spheres
Apr 03, 2023



Autonomous exploration is a crucial aspect of robotics that has numerous applications. Most of the existing methods greedily choose goals that maximize immediate reward. This strategy is computationally efficient but insufficient for overall exploration efficiency. In recent years, some state-of-the-art methods are proposed, which generate a global coverage path and significantly improve overall exploration efficiency. However, global optimization produces high computational overhead, leading to low-frequency planner updates and inconsistent planning motion. In this work, we propose a novel method to support fast UAV exploration in large-scale and cluttered 3-D environments. We introduce a computationally low-cost viewpoints generation method using novel occlusion-free spheres. Additionally, we combine greedy strategy with global optimization, which considers both computational and exploration efficiency. We benchmark our method against state-of-the-art methods to showcase its superiority in terms of exploration efficiency and computational time. We conduct various real-world experiments to demonstrate the excellent performance of our method in large-scale and cluttered environments.
ROG-Map: An Efficient Robocentric Occupancy Grid Map for Large-scene and High-resolution LiDAR-based Motion Planning
Feb 28, 2023



Recent advances in LiDAR technology have opened up new possibilities for robotic navigation. Given the widespread use of occupancy grid maps (OGMs) in robotic motion planning, this paper aims to address the challenges of integrating LiDAR with OGMs. To this end, we propose ROG-Map, a uniform grid-based OGM that maintains a local map moving along with the robot to enable efficient map operation and reduce memory costs for large-scene autonomous flight. Moreover, we present a novel incremental obstacle inflation method that significantly reduces the computational cost of inflation. The proposed method outperforms state-of-the-art (SOTA) methods on various public datasets. To demonstrate the effectiveness and efficiency of ROG-Map, we integrate it into a complete quadrotor system and perform autonomous flights against both small obstacles and large-scale scenes. During real-world flight tests with a 0.05 m resolution local map and 30mx30mx12m local map size, ROG-Map takes only 29.8% of frame time on average to update the map at a frame rate of 50 Hz (\ie, 5.96 ms in 20 ms), including 0.33% (i.e., 0.66 ms) to perform obstacle inflation, demonstrating outstanding real-world performance. We release ROG-Map as an open-source ROS package to promote the development of LiDAR-based motion planning.
Nonlinear Sufficient Dimension Reduction with a Stochastic Neural Network
Oct 09, 2022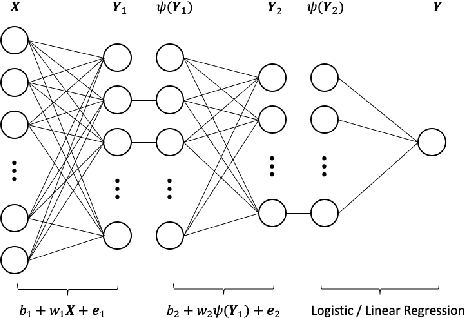
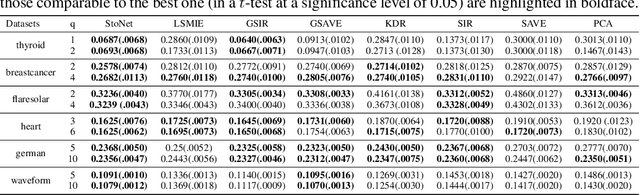
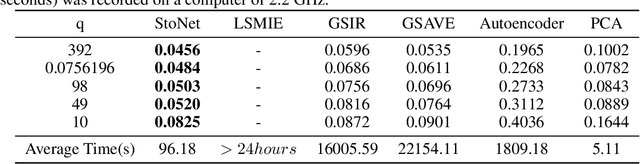
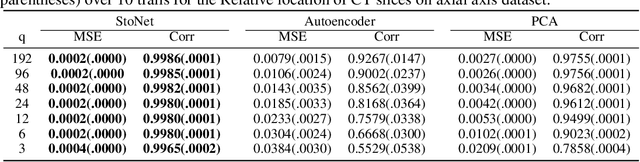
Sufficient dimension reduction is a powerful tool to extract core information hidden in the high-dimensional data and has potentially many important applications in machine learning tasks. However, the existing nonlinear sufficient dimension reduction methods often lack the scalability necessary for dealing with large-scale data. We propose a new type of stochastic neural network under a rigorous probabilistic framework and show that it can be used for sufficient dimension reduction for large-scale data. The proposed stochastic neural network is trained using an adaptive stochastic gradient Markov chain Monte Carlo algorithm, whose convergence is rigorously studied in the paper as well. Through extensive experiments on real-world classification and regression problems, we show that the proposed method compares favorably with the existing state-of-the-art sufficient dimension reduction methods and is computationally more efficient for large-scale data.
Online Whole-body Motion Planning for Quadrotor using Multi-resolution Search
Sep 14, 2022
In this paper, we address the problem of online quadrotor whole-body motion planning (SE(3) planning) in unknown and unstructured environments. We propose a novel multi-resolution search method, which discovers narrow areas requiring full pose planning and normal areas requiring only position planning. As a consequence, a quadrotor planning problem is decomposed into several SE(3) (if necessary) and R^3 sub-problems. To fly through the discovered narrow areas, a carefully designed corridor generation strategy for narrow areas is proposed, which significantly increases the planning success rate. The overall problem decomposition and hierarchical planning framework substantially accelerate the planning process, making it possible to work online with fully onboard sensing and computation in unknown environments. Extensive simulation benchmark comparisons show that the proposed method has an order of magnitude faster than the state-of-the-art methods in computation time while maintaining high planning success rate. The proposed method is finally integrated into a LiDAR-based autonomous quadrotor, and various real-world experiments in unknown and unstructured environments are conducted to demonstrate the outstanding performance of the proposed method.
Decentralized LiDAR-inertial Swarm Odometry
Sep 14, 2022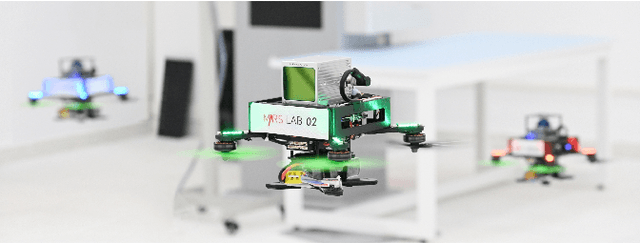
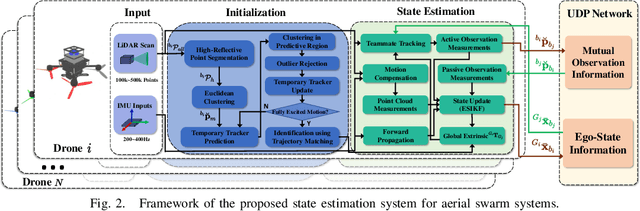
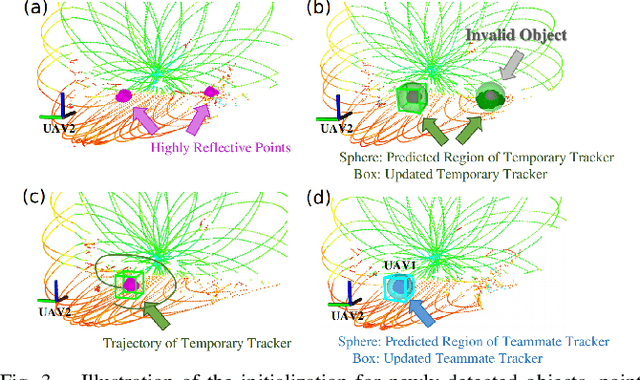
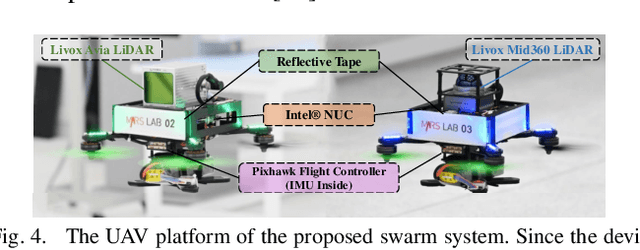
Accurate self and relative state estimation are the critical preconditions for completing swarm tasks, e.g., collaborative autonomous exploration, target tracking, search and rescue. This paper proposes a fully decentralized state estimation method for aerial swarm systems, in which each drone performs precise ego-state estimation, exchanges ego-state and mutual observation information by wireless communication, and estimates relative state with respect to (w.r.t.) the rest of UAVs, all in real-time and only based on LiDAR-inertial measurements. A novel 3D LiDAR-based drone detection, identification and tracking method is proposed to obtain observations of teammate drones. The mutual observation measurements are then tightly-coupled with IMU and LiDAR measurements to perform real-time and accurate estimation of ego-state and relative state jointly. Extensive real-world experiments show the broad adaptability to complicated scenarios, including GPS-denied scenes, degenerate scenes for camera (dark night) or LiDAR (facing a single wall). Compared with ground-truth provided by motion capture system, the result shows the centimeter-level localization accuracy which outperforms other state-of-the-art LiDAR-inertial odometry for single UAV system.