 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTacSL: A Library for Visuotactile Sensor Simulation and Learning
Aug 12, 2024



For both humans and robots, the sense of touch, known as tactile sensing, is critical for performing contact-rich manipulation tasks. Three key challenges in robotic tactile sensing are 1) interpreting sensor signals, 2) generating sensor signals in novel scenarios, and 3) learning sensor-based policies. For visuotactile sensors, interpretation has been facilitated by their close relationship with vision sensors (e.g., RGB cameras). However, generation is still difficult, as visuotactile sensors typically involve contact, deformation, illumination, and imaging, all of which are expensive to simulate; in turn, policy learning has been challenging, as simulation cannot be leveraged for large-scale data collection. We present \textbf{TacSL} (\textit{taxel}), a library for GPU-based visuotactile sensor simulation and learning. \textbf{TacSL} can be used to simulate visuotactile images and extract contact-force distributions over $200\times$ faster than the prior state-of-the-art, all within the widely-used Isaac Gym simulator. Furthermore, \textbf{TacSL} provides a learning toolkit containing multiple sensor models, contact-intensive training environments, and online/offline algorithms that can facilitate policy learning for sim-to-real applications. On the algorithmic side, we introduce a novel online reinforcement-learning algorithm called asymmetric actor-critic distillation (\sysName), designed to effectively and efficiently learn tactile-based policies in simulation that can transfer to the real world. Finally, we demonstrate the utility of our library and algorithms by evaluating the benefits of distillation and multimodal sensing for contact-rich manip ulation tasks, and most critically, performing sim-to-real transfer. Supplementary videos and results are at \url{https://iakinola23.github.io/tacsl/}.
FORGE: Force-Guided Exploration for Robust Contact-Rich Manipulation under Uncertainty
Aug 08, 2024



We present FORGE, a method that enables sim-to-real transfer of contact-rich manipulation policies in the presence of significant pose uncertainty. FORGE combines a force threshold mechanism with a dynamics randomization scheme during policy learning in simulation, to enable the robust transfer of the learned policies to the real robot. At deployment, FORGE policies, conditioned on a maximum allowable force, adaptively perform contact-rich tasks while respecting the specified force threshold, regardless of the controller gains. Additionally, FORGE autonomously predicts a termination action once the task has succeeded. We demonstrate that FORGE can be used to learn a variety of robust contact-rich policies, enabling multi-stage assembly of a planetary gear system, which requires success across three assembly tasks: nut-threading, insertion, and gear meshing. Project website can be accessed at https://noseworm.github.io/forge/.
AutoMate: Specialist and Generalist Assembly Policies over Diverse Geometries
Jul 10, 2024



Robotic assembly for high-mixture settings requires adaptivity to diverse parts and poses, which is an open challenge. Meanwhile, in other areas of robotics, large models and sim-to-real have led to tremendous progress. Inspired by such work, we present AutoMate, a learning framework and system that consists of 4 parts: 1) a dataset of 100 assemblies compatible with simulation and the real world, along with parallelized simulation environments for policy learning, 2) a novel simulation-based approach for learning specialist (i.e., part-specific) policies and generalist (i.e., unified) assembly policies, 3) demonstrations of specialist policies that individually solve 80 assemblies with 80% or higher success rates in simulation, as well as a generalist policy that jointly solves 20 assemblies with an 80%+ success rate, and 4) zero-shot sim-to-real transfer that achieves similar (or better) performance than simulation, including on perception-initialized assembly. The key methodological takeaway is that a union of diverse algorithms from manufacturing engineering, character animation, and time-series analysis provides a generic and robust solution for a diverse range of robotic assembly problems.To our knowledge, AutoMate provides the first simulation-based framework for learning specialist and generalist policies over a wide range of assemblies, as well as the first system demonstrating zero-shot sim-to-real transfer over such a range.
Scaling Population-Based Reinforcement Learning with GPU Accelerated Simulation
Apr 08, 2024



In recent years, deep reinforcement learning (RL) has shown its effectiveness in solving complex continuous control tasks like locomotion and dexterous manipulation. However, this comes at the cost of an enormous amount of experience required for training, exacerbated by the sensitivity of learning efficiency and the policy performance to hyperparameter selection, which often requires numerous trials of time-consuming experiments. This work introduces a Population-Based Reinforcement Learning (PBRL) approach that exploits a GPU-accelerated physics simulator to enhance the exploration capabilities of RL by concurrently training multiple policies in parallel. The PBRL framework is applied to three state-of-the-art RL algorithms -- PPO, SAC, and DDPG -- dynamically adjusting hyperparameters based on the performance of learning agents. The experiments are performed on four challenging tasks in Isaac Gym -- Anymal Terrain, Shadow Hand, Humanoid, Franka Nut Pick -- by analyzing the effect of population size and mutation mechanisms for hyperparameters. The results show that PBRL agents achieve superior performance, in terms of cumulative reward, compared to non-evolutionary baseline agents. The trained agents are finally deployed in the real world for a Franka Nut Pick task, demonstrating successful sim-to-real transfer. Code and videos of the learned policies are available on our project website.
MimicGen: A Data Generation System for Scalable Robot Learning using Human Demonstrations
Oct 26, 2023



Imitation learning from a large set of human demonstrations has proved to be an effective paradigm for building capable robot agents. However, the demonstrations can be extremely costly and time-consuming to collect. We introduce MimicGen, a system for automatically synthesizing large-scale, rich datasets from only a small number of human demonstrations by adapting them to new contexts. We use MimicGen to generate over 50K demonstrations across 18 tasks with diverse scene configurations, object instances, and robot arms from just ~200 human demonstrations. We show that robot agents can be effectively trained on this generated dataset by imitation learning to achieve strong performance in long-horizon and high-precision tasks, such as multi-part assembly and coffee preparation, across broad initial state distributions. We further demonstrate that the effectiveness and utility of MimicGen data compare favorably to collecting additional human demonstrations, making it a powerful and economical approach towards scaling up robot learning. Datasets, simulation environments, videos, and more at https://mimicgen.github.io .
IndustReal: Transferring Contact-Rich Assembly Tasks from Simulation to Reality
May 26, 2023Robotic assembly is a longstanding challenge, requiring contact-rich interaction and high precision and accuracy. Many applications also require adaptivity to diverse parts, poses, and environments, as well as low cycle times. In other areas of robotics, simulation is a powerful tool to develop algorithms, generate datasets, and train agents. However, simulation has had a more limited impact on assembly. We present IndustReal, a set of algorithms, systems, and tools that solve assembly tasks in simulation with reinforcement learning (RL) and successfully achieve policy transfer to the real world. Specifically, we propose 1) simulation-aware policy updates, 2) signed-distance-field rewards, and 3) sampling-based curricula for robotic RL agents. We use these algorithms to enable robots to solve contact-rich pick, place, and insertion tasks in simulation. We then propose 4) a policy-level action integrator to minimize error at policy deployment time. We build and demonstrate a real-world robotic assembly system that uses the trained policies and action integrator to achieve repeatable performance in the real world. Finally, we present hardware and software tools that allow other researchers to reproduce our system and results. For videos and additional details, please see http://sites.google.com/nvidia.com/industreal .
DefGraspNets: Grasp Planning on 3D Fields with Graph Neural Nets
Mar 28, 2023



Robotic grasping of 3D deformable objects is critical for real-world applications such as food handling and robotic surgery. Unlike rigid and articulated objects, 3D deformable objects have infinite degrees of freedom. Fully defining their state requires 3D deformation and stress fields, which are exceptionally difficult to analytically compute or experimentally measure. Thus, evaluating grasp candidates for grasp planning typically requires accurate, but slow 3D finite element method (FEM) simulation. Sampling-based grasp planning is often impractical, as it requires evaluation of a large number of grasp candidates. Gradient-based grasp planning can be more efficient, but requires a differentiable model to synthesize optimal grasps from initial candidates. Differentiable FEM simulators may fill this role, but are typically no faster than standard FEM. In this work, we propose learning a predictive graph neural network (GNN), DefGraspNets, to act as our differentiable model. We train DefGraspNets to predict 3D stress and deformation fields based on FEM-based grasp simulations. DefGraspNets not only runs up to 1500 times faster than the FEM simulator, but also enables fast gradient-based grasp optimization over 3D stress and deformation metrics. We design DefGraspNets to align with real-world grasp planning practices and demonstrate generalization across multiple test sets, including real-world experiments.
DeXtreme: Transfer of Agile In-hand Manipulation from Simulation to Reality
Oct 25, 2022Recent work has demonstrated the ability of deep reinforcement learning (RL) algorithms to learn complex robotic behaviours in simulation, including in the domain of multi-fingered manipulation. However, such models can be challenging to transfer to the real world due to the gap between simulation and reality. In this paper, we present our techniques to train a) a policy that can perform robust dexterous manipulation on an anthropomorphic robot hand and b) a robust pose estimator suitable for providing reliable real-time information on the state of the object being manipulated. Our policies are trained to adapt to a wide range of conditions in simulation. Consequently, our vision-based policies significantly outperform the best vision policies in the literature on the same reorientation task and are competitive with policies that are given privileged state information via motion capture systems. Our work reaffirms the possibilities of sim-to-real transfer for dexterous manipulation in diverse kinds of hardware and simulator setups, and in our case, with the Allegro Hand and Isaac Gym GPU-based simulation. Furthermore, it opens up possibilities for researchers to achieve such results with commonly-available, affordable robot hands and cameras. Videos of the resulting policy and supplementary information, including experiments and demos, can be found at \url{https://dextreme.org/}
Factory: Fast Contact for Robotic Assembly
May 07, 2022
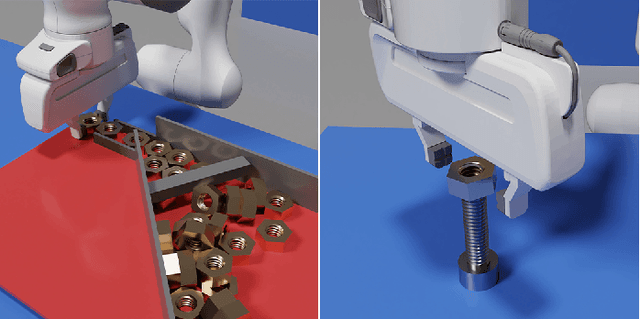
Robotic assembly is one of the oldest and most challenging applications of robotics. In other areas of robotics, such as perception and grasping, simulation has rapidly accelerated research progress, particularly when combined with modern deep learning. However, accurately, efficiently, and robustly simulating the range of contact-rich interactions in assembly remains a longstanding challenge. In this work, we present Factory, a set of physics simulation methods and robot learning tools for such applications. We achieve real-time or faster simulation of a wide range of contact-rich scenes, including simultaneous simulation of 1000 nut-and-bolt interactions. We provide $60$ carefully-designed part models, 3 robotic assembly environments, and 7 robot controllers for training and testing virtual robots. Finally, we train and evaluate proof-of-concept reinforcement learning policies for nut-and-bolt assembly. We aim for Factory to open the doors to using simulation for robotic assembly, as well as many other contact-rich applications in robotics. Please see https://sites.google.com/nvidia.com/factory for supplementary content, including videos.
Accelerated Policy Learning with Parallel Differentiable Simulation
Apr 14, 2022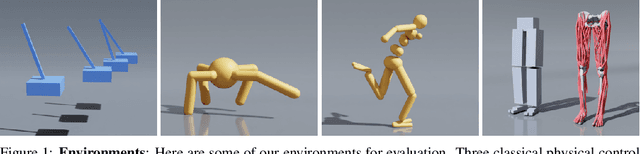
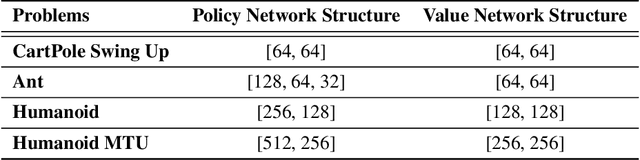
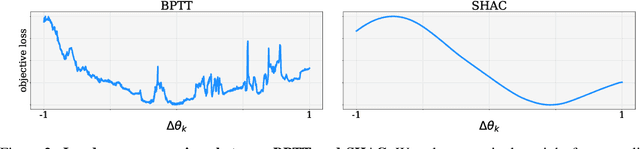
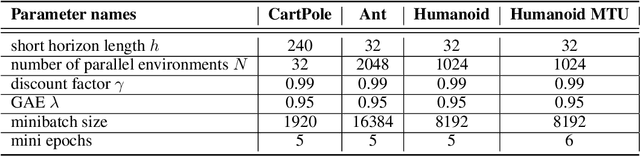
Deep reinforcement learning can generate complex control policies, but requires large amounts of training data to work effectively. Recent work has attempted to address this issue by leveraging differentiable simulators. However, inherent problems such as local minima and exploding/vanishing numerical gradients prevent these methods from being generally applied to control tasks with complex contact-rich dynamics, such as humanoid locomotion in classical RL benchmarks. In this work we present a high-performance differentiable simulator and a new policy learning algorithm (SHAC) that can effectively leverage simulation gradients, even in the presence of non-smoothness. Our learning algorithm alleviates problems with local minima through a smooth critic function, avoids vanishing/exploding gradients through a truncated learning window, and allows many physical environments to be run in parallel. We evaluate our method on classical RL control tasks, and show substantial improvements in sample efficiency and wall-clock time over state-of-the-art RL and differentiable simulation-based algorithms. In addition, we demonstrate the scalability of our method by applying it to the challenging high-dimensional problem of muscle-actuated locomotion with a large action space, achieving a greater than 17x reduction in training time over the best-performing established RL algorithm.