 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIsaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
Nov 06, 2025



We present Isaac Lab, the natural successor to Isaac Gym, which extends the paradigm of GPU-native robotics simulation into the era of large-scale multi-modal learning. Isaac Lab combines high-fidelity GPU parallel physics, photorealistic rendering, and a modular, composable architecture for designing environments and training robot policies. Beyond physics and rendering, the framework integrates actuator models, multi-frequency sensor simulation, data collection pipelines, and domain randomization tools, unifying best practices for reinforcement and imitation learning at scale within a single extensible platform. We highlight its application to a diverse set of challenges, including whole-body control, cross-embodiment mobility, contact-rich and dexterous manipulation, and the integration of human demonstrations for skill acquisition. Finally, we discuss upcoming integration with the differentiable, GPU-accelerated Newton physics engine, which promises new opportunities for scalable, data-efficient, and gradient-based approaches to robot learning. We believe Isaac Lab's combination of advanced simulation capabilities, rich sensing, and data-center scale execution will help unlock the next generation of breakthroughs in robotics research.
MatchMaker: Automated Asset Generation for Robotic Assembly
Mar 07, 2025



Robotic assembly remains a significant challenge due to complexities in visual perception, functional grasping, contact-rich manipulation, and performing high-precision tasks. Simulation-based learning and sim-to-real transfer have led to recent success in solving assembly tasks in the presence of object pose variation, perception noise, and control error; however, the development of a generalist (i.e., multi-task) agent for a broad range of assembly tasks has been limited by the need to manually curate assembly assets, which greatly constrains the number and diversity of assembly problems that can be used for policy learning. Inspired by recent success of using generative AI to scale up robot learning, we propose MatchMaker, a pipeline to automatically generate diverse, simulation-compatible assembly asset pairs to facilitate learning assembly skills. Specifically, MatchMaker can 1) take a simulation-incompatible, interpenetrating asset pair as input, and automatically convert it into a simulation-compatible, interpenetration-free pair, 2) take an arbitrary single asset as input, and generate a geometrically-mating asset to create an asset pair, 3) automatically erode contact surfaces from (1) or (2) according to a user-specified clearance parameter to generate realistic parts. We demonstrate that data generated by MatchMaker outperforms previous work in terms of diversity and effectiveness for downstream assembly skill learning. For videos and additional details, please see our project website: https://wangyian-me.github.io/MatchMaker/.
SRSA: Skill Retrieval and Adaptation for Robotic Assembly Tasks
Mar 06, 2025



Enabling robots to learn novel tasks in a data-efficient manner is a long-standing challenge. Common strategies involve carefully leveraging prior experiences, especially transition data collected on related tasks. Although much progress has been made for general pick-and-place manipulation, far fewer studies have investigated contact-rich assembly tasks, where precise control is essential. We introduce SRSA (Skill Retrieval and Skill Adaptation), a novel framework designed to address this problem by utilizing a pre-existing skill library containing policies for diverse assembly tasks. The challenge lies in identifying which skill from the library is most relevant for fine-tuning on a new task. Our key hypothesis is that skills showing higher zero-shot success rates on a new task are better suited for rapid and effective fine-tuning on that task. To this end, we propose to predict the transfer success for all skills in the skill library on a novel task, and then use this prediction to guide the skill retrieval process. We establish a framework that jointly captures features of object geometry, physical dynamics, and expert actions to represent the tasks, allowing us to efficiently learn the transfer success predictor. Extensive experiments demonstrate that SRSA significantly outperforms the leading baseline. When retrieving and fine-tuning skills on unseen tasks, SRSA achieves a 19% relative improvement in success rate, exhibits 2.6x lower standard deviation across random seeds, and requires 2.4x fewer transition samples to reach a satisfactory success rate, compared to the baseline. Furthermore, policies trained with SRSA in simulation achieve a 90% mean success rate when deployed in the real world. Please visit our project webpage https://srsa2024.github.io/.
FORGE: Force-Guided Exploration for Robust Contact-Rich Manipulation under Uncertainty
Aug 08, 2024



We present FORGE, a method that enables sim-to-real transfer of contact-rich manipulation policies in the presence of significant pose uncertainty. FORGE combines a force threshold mechanism with a dynamics randomization scheme during policy learning in simulation, to enable the robust transfer of the learned policies to the real robot. At deployment, FORGE policies, conditioned on a maximum allowable force, adaptively perform contact-rich tasks while respecting the specified force threshold, regardless of the controller gains. Additionally, FORGE autonomously predicts a termination action once the task has succeeded. We demonstrate that FORGE can be used to learn a variety of robust contact-rich policies, enabling multi-stage assembly of a planetary gear system, which requires success across three assembly tasks: nut-threading, insertion, and gear meshing. Project website can be accessed at https://noseworm.github.io/forge/.
AutoMate: Specialist and Generalist Assembly Policies over Diverse Geometries
Jul 10, 2024



Robotic assembly for high-mixture settings requires adaptivity to diverse parts and poses, which is an open challenge. Meanwhile, in other areas of robotics, large models and sim-to-real have led to tremendous progress. Inspired by such work, we present AutoMate, a learning framework and system that consists of 4 parts: 1) a dataset of 100 assemblies compatible with simulation and the real world, along with parallelized simulation environments for policy learning, 2) a novel simulation-based approach for learning specialist (i.e., part-specific) policies and generalist (i.e., unified) assembly policies, 3) demonstrations of specialist policies that individually solve 80 assemblies with 80% or higher success rates in simulation, as well as a generalist policy that jointly solves 20 assemblies with an 80%+ success rate, and 4) zero-shot sim-to-real transfer that achieves similar (or better) performance than simulation, including on perception-initialized assembly. The key methodological takeaway is that a union of diverse algorithms from manufacturing engineering, character animation, and time-series analysis provides a generic and robust solution for a diverse range of robotic assembly problems.To our knowledge, AutoMate provides the first simulation-based framework for learning specialist and generalist policies over a wide range of assemblies, as well as the first system demonstrating zero-shot sim-to-real transfer over such a range.
IndustReal: Transferring Contact-Rich Assembly Tasks from Simulation to Reality
May 26, 2023Robotic assembly is a longstanding challenge, requiring contact-rich interaction and high precision and accuracy. Many applications also require adaptivity to diverse parts, poses, and environments, as well as low cycle times. In other areas of robotics, simulation is a powerful tool to develop algorithms, generate datasets, and train agents. However, simulation has had a more limited impact on assembly. We present IndustReal, a set of algorithms, systems, and tools that solve assembly tasks in simulation with reinforcement learning (RL) and successfully achieve policy transfer to the real world. Specifically, we propose 1) simulation-aware policy updates, 2) signed-distance-field rewards, and 3) sampling-based curricula for robotic RL agents. We use these algorithms to enable robots to solve contact-rich pick, place, and insertion tasks in simulation. We then propose 4) a policy-level action integrator to minimize error at policy deployment time. We build and demonstrate a real-world robotic assembly system that uses the trained policies and action integrator to achieve repeatable performance in the real world. Finally, we present hardware and software tools that allow other researchers to reproduce our system and results. For videos and additional details, please see http://sites.google.com/nvidia.com/industreal .
Modeling Named Entity Embedding Distribution into Hypersphere
Sep 03, 2019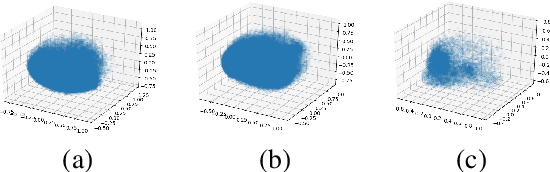
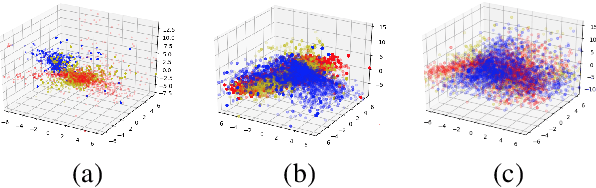
This work models named entity distribution from a way of visualizing topological structure of embedding space, so that we make an assumption that most, if not all, named entities (NEs) for a language tend to aggregate together to be accommodated by a specific hypersphere in embedding space. Thus we present a novel open definition for NE which alleviates the obvious drawback in previous closed NE definition with a limited NE dictionary. Then, we show two applications with introducing the proposed named entity hypersphere model. First, using a generative adversarial neural network to learn a transformation matrix of two embedding spaces, which results in a convenient determination of named entity distribution in the target language, indicating the potential of fast named entity discovery only using isomorphic relation between embedding spaces. Second, the named entity hypersphere model is directly integrated with various named entity recognition models over sentences to achieve state-of-the-art results. Only assuming that embeddings are available, we show a prior knowledge free approach on effective named entity distribution depiction.
SJTU-NLP at SemEval-2018 Task 9: Neural Hypernym Discovery with Term Embeddings
May 26, 2018
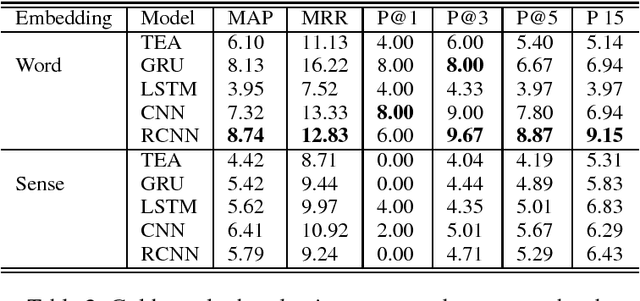
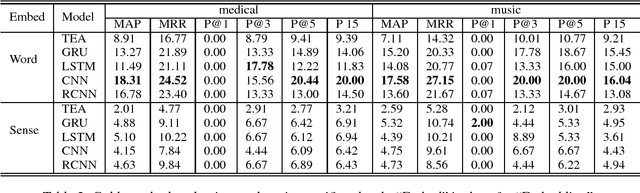
This paper describes a hypernym discovery system for our participation in the SemEval-2018 Task 9, which aims to discover the best (set of) candidate hypernyms for input concepts or entities, given the search space of a pre-defined vocabulary. We introduce a neural network architecture for the concerned task and empirically study various neural network models to build the representations in latent space for words and phrases. The evaluated models include convolutional neural network, long-short term memory network, gated recurrent unit and recurrent convolutional neural network. We also explore different embedding methods, including word embedding and sense embedding for better performance.