 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTernary-type Opacity and Hybrid Odometry for RGB-only NeRF-SLAM
Dec 22, 2023



The opacity of rigid 3D scenes with opaque surfaces is considered to be of a binary type. However, we observed that this property is not followed by the existing RGB-only NeRF-SLAM. Therefore, we are motivated to introduce this prior into the RGB-only NeRF-SLAM pipeline. Unfortunately, the optimization through the volumetric rendering function does not facilitate easy integration of the desired prior. Instead, we observed that the opacity of ternary-type (TT) is well supported. In this work, we study why ternary-type opacity is well-suited and desired for the task at hand. In particular, we provide theoretical insights into the process of jointly optimizing radiance and opacity through the volumetric rendering process. Through exhaustive experiments on benchmark datasets, we validate our claim and provide insights into the optimization process, which we believe will unleash the potential of RGB-only NeRF-SLAM. To foster this line of research, we also propose a simple yet novel visual odometry scheme that uses a hybrid combination of volumetric and warping-based image renderings. More specifically, the proposed hybrid odometry (HO) additionally uses image warping-based coarse odometry, leading up to an order of magnitude final speed-up. Furthermore, we show that the proposed TT and HO well complement each other, offering state-of-the-art results on benchmark datasets in terms of both speed and accuracy.
Parameter-Efficient Orthogonal Finetuning via Butterfly Factorization
Nov 10, 2023



Large foundation models are becoming ubiquitous, but training them from scratch is prohibitively expensive. Thus, efficiently adapting these powerful models to downstream tasks is increasingly important. In this paper, we study a principled finetuning paradigm -- Orthogonal Finetuning (OFT) -- for downstream task adaptation. Despite demonstrating good generalizability, OFT still uses a fairly large number of trainable parameters due to the high dimensionality of orthogonal matrices. To address this, we start by examining OFT from an information transmission perspective, and then identify a few key desiderata that enable better parameter-efficiency. Inspired by how the Cooley-Tukey fast Fourier transform algorithm enables efficient information transmission, we propose an efficient orthogonal parameterization using butterfly structures. We apply this parameterization to OFT, creating a novel parameter-efficient finetuning method, called Orthogonal Butterfly (BOFT). By subsuming OFT as a special case, BOFT introduces a generalized orthogonal finetuning framework. Finally, we conduct an extensive empirical study of adapting large vision transformers, large language models, and text-to-image diffusion models to various downstream tasks in vision and language.
NICER-SLAM: Neural Implicit Scene Encoding for RGB SLAM
Feb 07, 2023



Neural implicit representations have recently become popular in simultaneous localization and mapping (SLAM), especially in dense visual SLAM. However, previous works in this direction either rely on RGB-D sensors, or require a separate monocular SLAM approach for camera tracking and do not produce high-fidelity dense 3D scene reconstruction. In this paper, we present NICER-SLAM, a dense RGB SLAM system that simultaneously optimizes for camera poses and a hierarchical neural implicit map representation, which also allows for high-quality novel view synthesis. To facilitate the optimization process for mapping, we integrate additional supervision signals including easy-to-obtain monocular geometric cues and optical flow, and also introduce a simple warping loss to further enforce geometry consistency. Moreover, to further boost performance in complicated indoor scenes, we also propose a local adaptive transformation from signed distance functions (SDFs) to density in the volume rendering equation. On both synthetic and real-world datasets we demonstrate strong performance in dense mapping, tracking, and novel view synthesis, even competitive with recent RGB-D SLAM systems.
OpenScene: 3D Scene Understanding with Open Vocabularies
Nov 28, 2022



Traditional 3D scene understanding approaches rely on labeled 3D datasets to train a model for a single task with supervision. We propose OpenScene, an alternative approach where a model predicts dense features for 3D scene points that are co-embedded with text and image pixels in CLIP feature space. This zero-shot approach enables task-agnostic training and open-vocabulary queries. For example, to perform SOTA zero-shot 3D semantic segmentation it first infers CLIP features for every 3D point and later classifies them based on similarities to embeddings of arbitrary class labels. More interestingly, it enables a suite of open-vocabulary scene understanding applications that have never been done before. For example, it allows a user to enter an arbitrary text query and then see a heat map indicating which parts of a scene match. Our approach is effective at identifying objects, materials, affordances, activities, and room types in complex 3D scenes, all using a single model trained without any labeled 3D data.
PatchShading: High-Quality Human Reconstruction by Patch Warping and Shading Refinement
Nov 26, 2022Human reconstruction from multi-view images plays an important role in many applications. Although neural rendering methods have achieved promising results on synthesising realistic images, it is still difficult to handle the ambiguity between the geometry and appearance using only rendering loss. Moreover, it is very computationally intensive to render a whole image as each pixel requires a forward network inference. To tackle these challenges, we propose a novel approach called \emph{PatchShading} to reconstruct high-quality mesh of human body from multi-view posed images. We first present a patch warping strategy to constrain multi-view photometric consistency explicitly. Second, we adopt sphere harmonics (SH) illumination and shape from shading image formation to further refine the geometric details. By taking advantage of the oriented point clouds shape representation and SH shading, our proposed method significantly reduce the optimization and rendering time compared to those implicit methods. The encouraging results on both synthetic and real-world datasets demonstrate the efficacy of our proposed approach.
DiffDreamer: Consistent Single-view Perpetual View Generation with Conditional Diffusion Models
Nov 22, 2022Perpetual view generation -- the task of generating long-range novel views by flying into a given image -- has been a novel yet promising task. We introduce DiffDreamer, an unsupervised framework capable of synthesizing novel views depicting a long camera trajectory while training solely on internet-collected images of nature scenes. We demonstrate that image-conditioned diffusion models can effectively perform long-range scene extrapolation while preserving both local and global consistency significantly better than prior GAN-based methods. Project page: https://primecai.github.io/diffdreamer .
3D Textured Shape Recovery with Learned Geometric Priors
Sep 07, 2022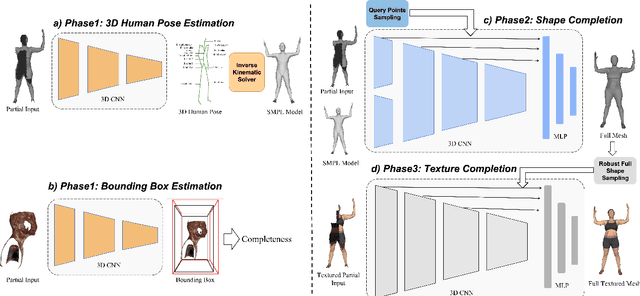
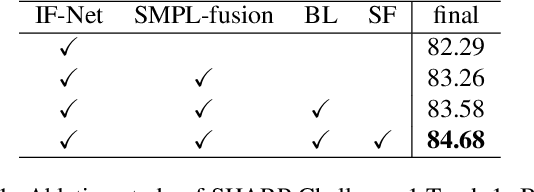
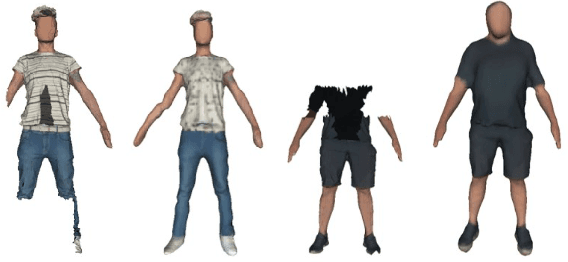
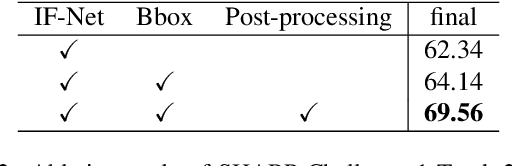
3D textured shape recovery from partial scans is crucial for many real-world applications. Existing approaches have demonstrated the efficacy of implicit function representation, but they suffer from partial inputs with severe occlusions and varying object types, which greatly hinders their application value in the real world. This technical report presents our approach to address these limitations by incorporating learned geometric priors. To this end, we generate a SMPL model from learned pose prediction and fuse it into the partial input to add prior knowledge of human bodies. We also propose a novel completeness-aware bounding box adaptation for handling different levels of scales and partialness of partial scans.
MonoSDF: Exploring Monocular Geometric Cues for Neural Implicit Surface Reconstruction
Jun 01, 2022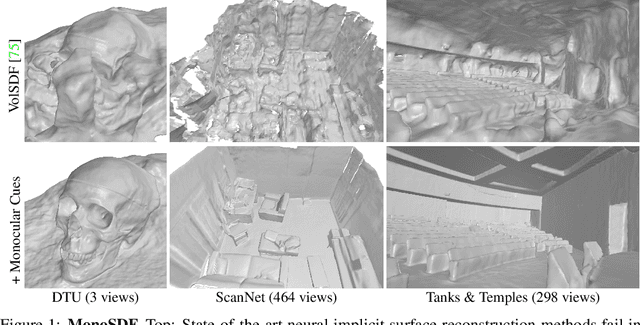
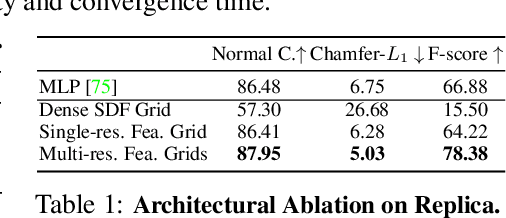
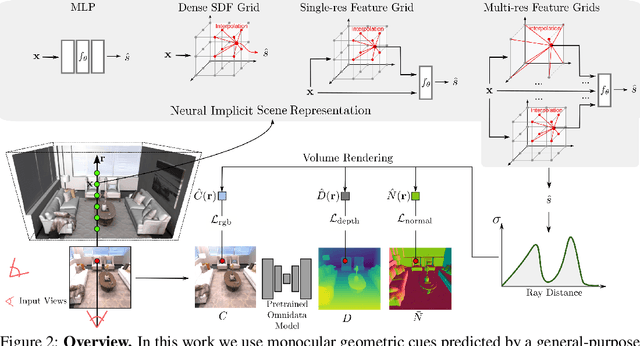
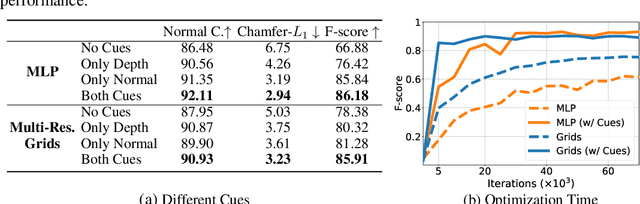
In recent years, neural implicit surface reconstruction methods have become popular for multi-view 3D reconstruction. In contrast to traditional multi-view stereo methods, these approaches tend to produce smoother and more complete reconstructions due to the inductive smoothness bias of neural networks. State-of-the-art neural implicit methods allow for high-quality reconstructions of simple scenes from many input views. Yet, their performance drops significantly for larger and more complex scenes and scenes captured from sparse viewpoints. This is caused primarily by the inherent ambiguity in the RGB reconstruction loss that does not provide enough constraints, in particular in less-observed and textureless areas. Motivated by recent advances in the area of monocular geometry prediction, we systematically explore the utility these cues provide for improving neural implicit surface reconstruction. We demonstrate that depth and normal cues, predicted by general-purpose monocular estimators, significantly improve reconstruction quality and optimization time. Further, we analyse and investigate multiple design choices for representing neural implicit surfaces, ranging from monolithic MLP models over single-grid to multi-resolution grid representations. We observe that geometric monocular priors improve performance both for small-scale single-object as well as large-scale multi-object scenes, independent of the choice of representation.
NICE-SLAM: Neural Implicit Scalable Encoding for SLAM
Dec 22, 2021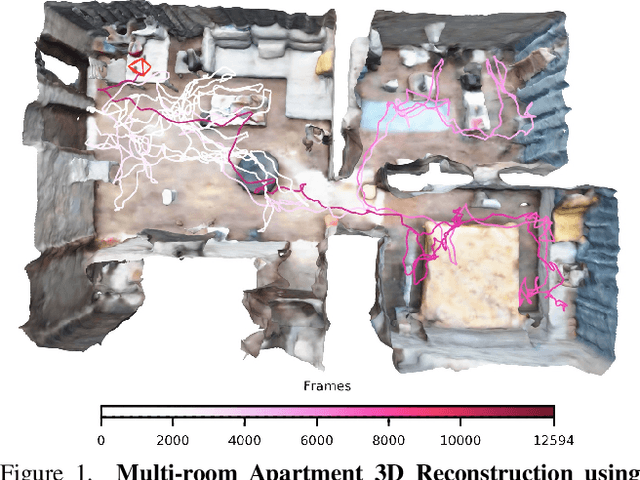
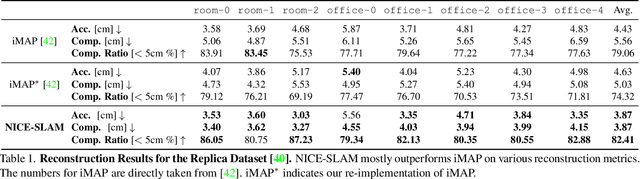
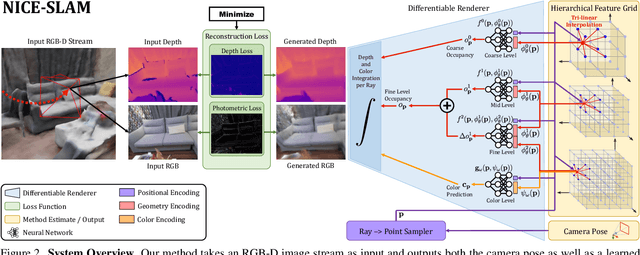
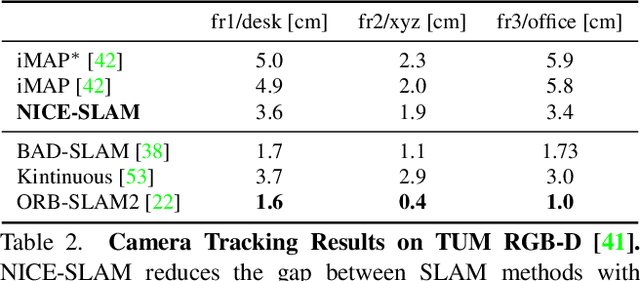
Neural implicit representations have recently shown encouraging results in various domains, including promising progress in simultaneous localization and mapping (SLAM). Nevertheless, existing methods produce over-smoothed scene reconstructions and have difficulty scaling up to large scenes. These limitations are mainly due to their simple fully-connected network architecture that does not incorporate local information in the observations. In this paper, we present NICE-SLAM, a dense SLAM system that incorporates multi-level local information by introducing a hierarchical scene representation. Optimizing this representation with pre-trained geometric priors enables detailed reconstruction on large indoor scenes. Compared to recent neural implicit SLAM systems, our approach is more scalable, efficient, and robust. Experiments on five challenging datasets demonstrate competitive results of NICE-SLAM in both mapping and tracking quality.
Shape As Points: A Differentiable Poisson Solver
Jun 07, 2021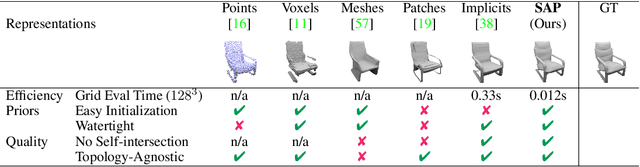
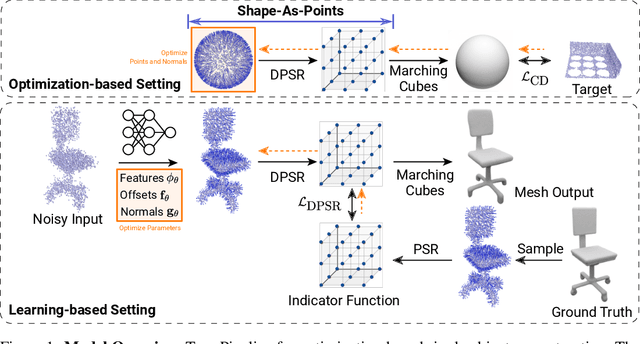
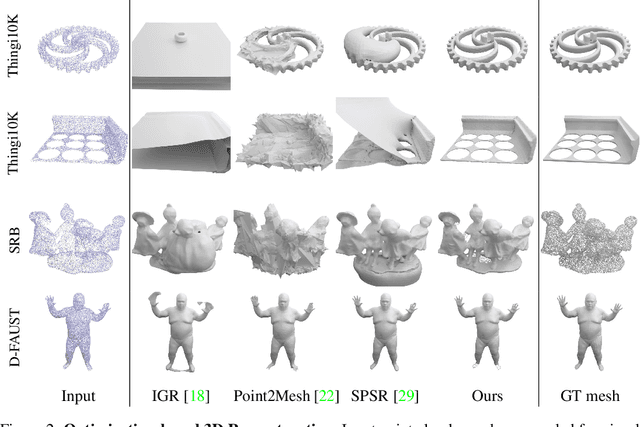
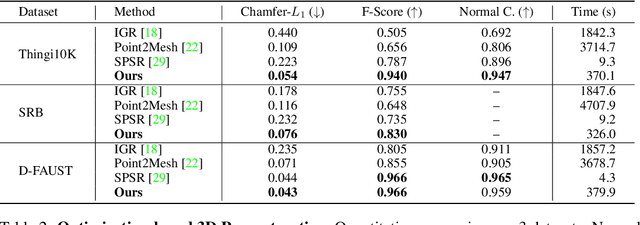
In recent years, neural implicit representations gained popularity in 3D reconstruction due to their expressiveness and flexibility. However, the implicit nature of neural implicit representations results in slow inference time and requires careful initialization. In this paper, we revisit the classic yet ubiquitous point cloud representation and introduce a differentiable point-to-mesh layer using a differentiable formulation of Poisson Surface Reconstruction (PSR) that allows for a GPU-accelerated fast solution of the indicator function given an oriented point cloud. The differentiable PSR layer allows us to efficiently and differentiably bridge the explicit 3D point representation with the 3D mesh via the implicit indicator field, enabling end-to-end optimization of surface reconstruction metrics such as Chamfer distance. This duality between points and meshes hence allows us to represent shapes as oriented point clouds, which are explicit, lightweight and expressive. Compared to neural implicit representations, our Shape-As-Points (SAP) model is more interpretable, lightweight, and accelerates inference time by one order of magnitude. Compared to other explicit representations such as points, patches, and meshes, SAP produces topology-agnostic, watertight manifold surfaces. We demonstrate the effectiveness of SAP on the task of surface reconstruction from unoriented point clouds and learning-based reconstruction.